浮车型五模块有轨电车质量均衡计算系统开发*
2019-05-16 05:52杨丰萍左君成
铁道机车车辆 2019年2期
杨丰萍, 左君成 , 金 林
(华东交通大学 电气与自动化工程学院, 南昌 330006)
车辆的质量均衡控制,是有轨电车设计过程中的一项关键内容。寻找一种合理的算法来计算出车辆的重心位置、各轴的轴重,是有轨电车质量管理必不可少的一环。只有做到精确地质量管控,才可以在满足线路及标准要求的基础上,最大限度地降低设计难度、节约设计成本[1]。浮车型有轨电车是现代有轨电车的主流结构形式,浮车型五模块有轨电车采用“=MC1+F1+Tp+F2+MC2=”编组,由于其采用多个铰接结构相连的结构,要保证车辆的质量均衡,轴重计算问题尤其重要。
1 车辆特点与计算公式
1.1 车辆结构特点及坐标系
轴重计算的基本理论是依据力平衡与力矩平衡原理来计算重心位置以及各轴轴重,但是力矩平衡有一个前提条件,就是计算对象必须为一个刚体。对于浮车型5模块有轨电车而言,各模块通过铰接装置相连接[2],模块的质量相互独立又相互影响,故不能单独对各节车进行受力分析。
定义MC1车与F1车之间的铰接为A位铰接,F1车与Tp之间的铰接为B位铰接,Tp车与F2车之间的铰接为C为铰接,F2车与MC2车之间的铰接为D位铰接。A位、B位、D位的铰接装置为固定铰+弹性铰,主要允许车体间的摇头运动,而限制车体之间的侧滚和点头运动;C位的铰接装置为固定铰+自由铰,允许车体间的摇头运动和点头运动,限制车体间的侧滚[3-4]。故在垂向方向上,可在C位铰接处,将浮车型五模块有轨电车划分为两部分,定义Mc1模块、F1模块与Tp模块组成为刚体模块1,F2模块与Mc2模块组成刚体模块2[5]。
1.2 轴重计算公式
将浮车型五模块有轨电车划分模块1和模块2,分别如图2和图3所示。

图1 五模块坐标系及尺寸符号定义图

图2 刚体模块1受力分析
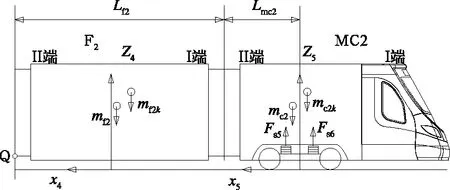
图3 刚体模块2受力分析
由力平衡及力矩平衡可列方程:
mc1+mf1+mtp+mf2+mc2+mc1k+
(1)
mc1×Lc1+mf1×Lf1+mtp×
Ltp+mc1k×Lc1k+mf1k×Lf1k+
mtpk×Ltpk=Fs1×Ls1+
Fs2×Ls2+Fs3×Ls3+Fs4×Ls4
(2)
mf2×Lf2+mc2×Lc2+mf2k×Lf2k+
mc2k×Lc2k=Fs5×Ls5+Fs6×Ls6
(3)
其中,Fsi为转向架上二系弹簧组对车体的垂向载荷,i=1,2,3,4,5,6;mc1,mf1,mtp,mf2,mc2,mc1k,mf1k,mtpk,mf2k,mc2k分别为对应车体的质量和载客的质量;Lsk为对应轮对的二系弹簧距Q点的纵向距离,k=1,2,3,4,5,6;Lc1,Lf1,Ltp,Lf2,Lc2,Lc1k,Lf1k,Ltpk,Lf2k,Lc2k是各车体和车上乘客的重心距Q点的距离;
将二系簧的垂向载荷由垂向刚度和垂向静挠度表示为[6]:
Fs1=Kmc×fs1
(4)
Fs2=Kmc×fs2=Kmc×(fs1-Ls×α)
(5)
Fs3=Ktp×fs3=Ktp×(fs1-L×α)
(6)
Fs4=Ktp×fs4=Ktp×(fs1-L×α-Ls×α)
(7)
Fs5=Kmc×fs5=Kmc×(fs6-Ls×β)
(8)
Fs6=Kmc×fs6
(9)
其中,α,β分别为模块1,模块2的点头转角;Kmc,Ktp为转向架的垂向刚度;fs1,fs2,fs3,fs4,fs5,fs6分别为3个转向架二系簧的垂向静挠度;
模块1和模块2在Q点的垂向位移满足关系式
fs1-Ls1×α=fs6-Ls6×β
(10)
由式(1)~式(10)可解得
2(Kmc+Ktp)×fs1-(Kmc+Ktp)×Ls×α-
2Ktp×L×α+2Kmc×fs6-Ks6-Kmc×Ls×β=
mc1+mf1+mtp+mf2+mc2+mc1k+mf1k
+mtpk+mf2k+mc2k
(11)
(Kmc×Ls1+Kmc×Ls2+Ktp×Ls3+Ktp×Ls4)×fs1
-Kmc×Ls×α×Ls2-Ktp×L×α×Ls3-Ktp×
(L+Ls)×α×Ls4=mc1×Lc1+mf1×Lf1+
mtp×Ltp+mc1k×Lc1k+mf1k×Lf1k+mtpk×Ltpk
(12)
Kmc×(Ls5+Ls6)×fs6-Kmz×Ls×β×Ls5=mc2×
Lc2+mf2×Lf2+mc2k×Lc2k+mf2k×Lf2k
(13)
由式(10)~式(13)可求得α,β,fs1,fs6,再将fs1,fs6带入式(4)~式(9)可计算出模块1和模块2转向架二系弹簧组的垂向载荷Fsi(i=1,2,3,4,5,6)。
以MC1车下转向架为研究对象,一端轮对的轴重由力矩平衡可得
Fa1=[Fs1×(Lw/2+Ls/2)+mc1b×
(Lw/2+Xc1b)+Fs2×(Lw/2-Ls/2)]/Lw
(14)
二端轮对的轴重为
Fa2=[Fs1×(Lw/2-Ls/2)+mc1b×
(Lw/2-Xc1b)+Fs2×(Lw/2+Ls/2)]/Lw
(15)
以Tp车下转向架为研究对象,一端轮对的轴重由力矩平衡可得
Fa3=[Fs3×(Lw/2+Ls/2)+mtpb×
(Lw/2+Xtpb)+Fs4×(Lw/2-Ls/2)]/Lw
(16)
二端轮对的轴重为
Fa4=[Fs3×(Lw/2-Ls/2)+mtpb×
(Lw/2-Xtpb)+Fs4×(Lw/2+Ls/2)]/Lw
(17)
以MC2车下转向架为研究对象,一端轮对的轴重由力矩平衡可得
Fa5=[Fs5×(Lw/2+Ls/2)+mc2b×
(Lw/2+Xc2b)+Fs5×(Lw/2-Ls/2)]/Lw
(18)
二端轮对的轴重为
Fa6=[Fs5×(Lw/2-Ls/2)+mc2b×
(Lw/2-Xc2b)+Fs6×(Lw/2-Ls/2)]/Lw
(19)
其中,Xc1b,Xtpb,Xc2b分别为MC1,Tp,MC2车下转向架的X轴坐标。
2 系统设计与开发
浮车型五模块的有轨电车的结构复杂,其轴重计算要分别计算出5节车的质量,重心坐标,车与车之间的铰接装置也需要分别计算,将其质量平均分配到相邻两节车上,车上零部件多、轴重计算公式复杂,采用手工计算或者是Excel表格计算工作量大,且容易出错,因此,综合考虑,采用C#+SQL SERVER的技术方案开发针对浮车型五模块有轨电车的计算工具,提高计算效率和数据管理能力。Visual Studio 2010 平台下C#语言是一种简洁高效,面向对象的编程语言,可实现简单美观,人性化的用户界面,且组件和类库多,响应速度较快。C#语言开发的系统对SQL SERVER 数据库具有很好的兼容性,有丰富的开发组件对数据库进行增、删、改、查等操作[7]。
2.1 系统需求分析
该系统主要是浮车型质量均衡计算的过程规范、简洁和计算结果准确,同时,还能实现车辆的质量管理[8]。浮车型质量均衡计算软件系统能够正确引导设计人员在规定时间内快速可靠地完成设计任务,其功能需求概述如下:
(1) 基本信息输入功能: 通过手工输入、从数据库导入或者Excel文件导入等多种输入方式,将车体基本参数、各零部件质量、位置坐标,力矩,转动惯量等参数导入到系统中,提供均衡计算的基础数据。
(2) 均衡计算功能:计算出车体总重、重心坐标、转动惯量,回转半径,轴重、轴重偏差百分比等。
(3) 计算结果导出功能:将计算结果输出到报表,可直接打印报表或以Word格式、Excel格式、PDF格式等形式导出。
(4) 人员管理及权限分配功能:实现用户管理以及系统操作权限管理。
(5) 历史数据管理功能:保存历史计算的输入参数和计算结果,可对历史数据增删改查。
根据需求分析,系统的功能模块可主要分为如下几个模块:系统登录模块,数据管理模块,数据编辑模块,结果显示模块和报表打印输出模块,其如图4所示。
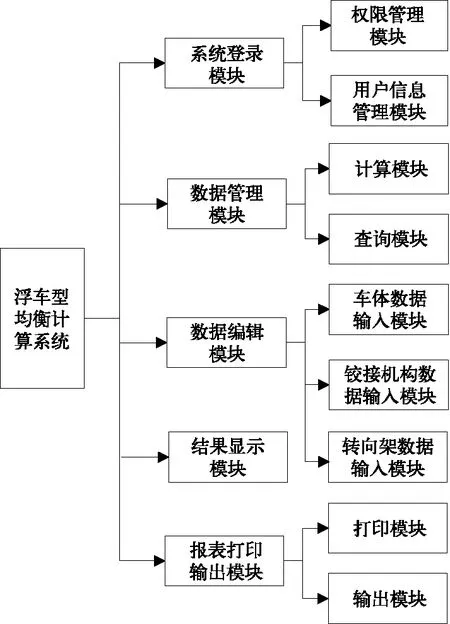
图4 系统功能模块图
2.2 系统实现与计算
为验证推导公式在实际应用中的可行性,先将公式编写入系统中,然后将车辆厂提供的相关参数和数据导入系统中进行计算,参考轴重差±2%,验证公式的合理性。在AW2状态下,车体数据输入界面如图5所示,输入方式可选择手动输入,EXCEL表格导入和数据库导入3种方式,由于五模块是一个整体,在车体数据输入时,要确保5节车体数据均保存完成后,才能点击“下一步”,否则会提示某节车的车体数据未输入。
当设定了车体部件数据后,还需要分别输入铰接机构部件数据和转向架数据,输入完成后,点击“计算”按钮,软件将依据上述推导的数据公式进行质量均衡计算,计算结果界面如图6所示。
从图6中,可以看出,计算的轴重差在合理范围内,满足技术要求。

图5 系统输入界面

图6 计算结果界面
3 结果验证
在数据管理方面,系统对每次计算累积的原始数据和计算结果进行存储,从而形成由累积效应得来的可供后续项目参考和调用的大型数据库,这样既可以实现对历史数据有序可靠管理,又避免了数据资源的浪费,提高了原始数据的利用率[9]。
为验证推导公式在实际应用中的可行性,从某车辆厂获取浮车型五模块有轨电车的数据,将其导入软件系统中进行计算,参考轴重差±2%[10],验证公式的合理性。以实际测量数据,理论计算数据及车辆厂提供的EXCEL表格计算数据作为参考,得到表1如下图所示。
结果分析:从表1中可看出,均衡计算系统的计算结果接近实际测量结果,软件计算得到的数据与实际测量数据的最大偏差率仅为0.49%。将部件制造偏差、测量误差的累积以及车体安装精度差异考虑在内,软件计算所得结果与实际测量结果吻合,因此,该软件系统的计算精度满足要求。
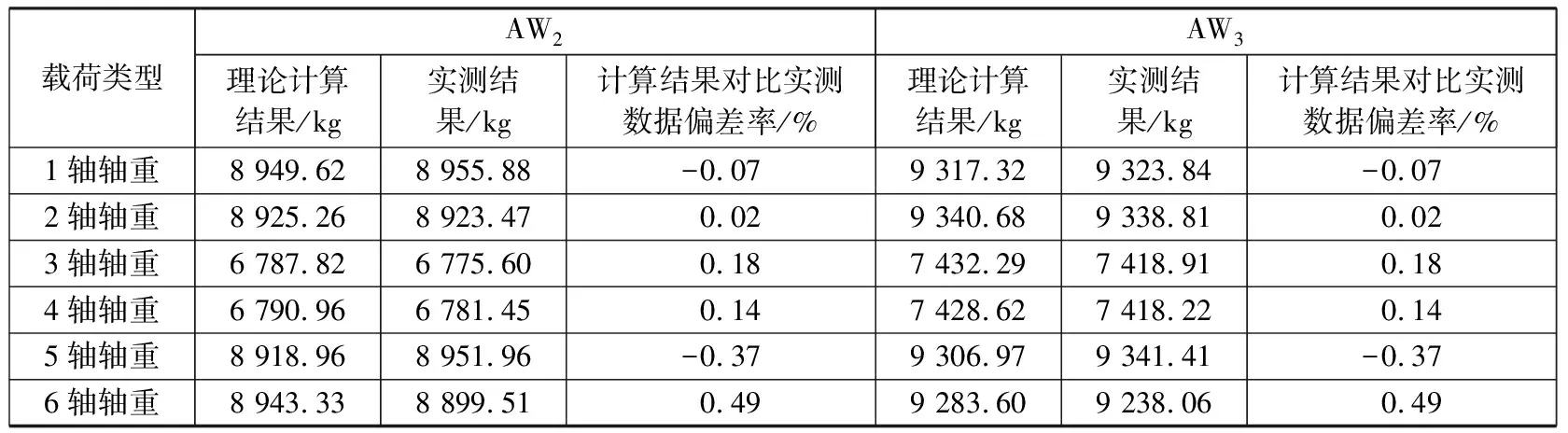
表1 计算结果对比表
4 结束语
由于浮车型五模块质量均衡计算比较复杂,该文基于Visual Studio 2010平台下C#语言开发了一种浮车型五模块质量均衡计算系统软件。为提高数据的重复利用率,采用SQL SERVER 2008数据库存储数据,并实现数据共享和统一管理。经过测试和系统结果验证,该系统计算准确、稳定可靠、响应速度快,具有较高的实用价值,不足之处在于,该系统目前仅支持五模块浮车型有轨电车的质量均衡计算。
猜你喜欢
城市轨道交通研究(2022年2期)2022-11-18
科技与创新(2022年12期)2022-06-26
中国重型装备(2022年1期)2022-02-11
科技研究·理论版(2021年20期)2021-04-20
科技研究·理论版(2021年20期)2021-04-20
哈尔滨铁道科技(2020年4期)2020-07-22
汽车世界·车辆工程技术(中)(2020年1期)2020-07-09
北方交通(2020年6期)2020-07-09
专用汽车(2016年12期)2016-02-11
山东工业技术(2014年20期)2014-10-21