
亥姆霍兹消声器自适应控制方法研究
2019-05-21 06:16吕海峰袁晓红
声学技术 2019年2期
安 君,吕海峰,陈 鹏,袁晓红
(中北大学机械工程学院,山西 太原,030051)
0 引 言
亥姆霍兹消声器作为一种有效的低频噪声控制元件,因其具有结构简单、降噪效果显著等特点,被广泛应用在飞机引擎、车辆动力舱以及建筑设计和工业设备等领域中[1]。亥姆霍兹消声器作为控制振动与噪声的有效手段[2],其消音性能一直是研究的热点。靳国永等[3]设计了一种颈部面积可变的可调频亥姆霍兹消声器,利用点积值调频算法对单频下封闭空间噪声控制进行了仿真与实验,实验结果显示,最优控制点出现在200 s左右。周城光等[4]研究了充水亥姆霍兹消声器的弹性壁对其声学性能的影响。张亚东等[5]研究了入射声波在周围镶嵌亥姆霍兹消声器的刚性界面上的情况。陈明等[6]测量了不同颈部材料下的静流阻率和吸声系数,计算消声器颈部入口声阻抗,并优化消声器吸声效果。LI L J等[7]研究了亥姆霍兹消声器的结构参数和边界条件对共振频率的影响。YASUDA T等[8]提出了一种汽车尾管亥姆霍兹消声器,对消声器的声学性能进行了理论上和实验上的研究。CAI C Z等[9]提出了一种改进的管道亥姆霍兹消声器系统,通过在横向上增加亥姆霍兹消声器提高其消声效果,但是无法适应实际激扰频率多变的噪声环境。
传统的亥姆霍兹消声器,随着其颈部长度、颈部截面积及共振腔体等参数的确定,其共振频率随即确定,无法随着激扰频率与环境条件的改变而发生变化,其消声效果大幅度下降。因而,研究频率可调的亥姆霍兹消声器具有重要的意义。吕海峰等[10]采用气泡制动器改变消声器共振腔体积,实现了对多个频率噪声的抑制,但其控制过程中需使用增压装置,控制较为复杂。BIRDSONG C等[11]提出了一种半主动的亥姆霍兹(Helmholtz)共振器,其实验装置可以随噪声源主要频率的变化自动调节Helmholtz共振器的共振腔容积。普渡大学的KOSTEK T M等[12]也提出了类似的自适应被动式噪声控制策略。KOBAYASHI H等[13]成功地将这种自适应控制技术应用于风扇噪声的控制。HONG Z L等[14]提出了将声衬铺入亥姆霍兹消声器腔体壁中,实验表明在侧壁上安装声衬可以改变共振频率,并且能够提供更好的吸声效果。QIU S[15]等设计了一种采用虹膜装置调节颈部面积的亥姆霍兹共振消声器,该结构实现了共振频率从40~160 Hz的变化。
上述优化后的亥姆霍兹消声器,降噪效果有所提升,但控制过程较为复杂,无法根据环境噪声频率的变化完全实现自适应控制。因而研究具有自适应调节功能的亥姆霍兹消声器具有重要意义。本文在对传统亥姆霍兹消声器进行理论分析的基础上,提出了一种具有腔体体积自适应调节的消声器结构与控制算法,实现了宽频噪声的自适应控制。
1 亥姆霍兹消声器消声原理
亥姆霍兹消声器由一个颈部及腔体组成,如图1所示。
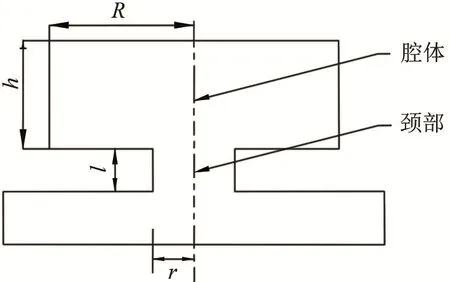
图1 亥姆霍兹消声器结构Fig.1 Structure of Helmholtz muffler
颈部内的空气柱在声波的作用下类比于质量块,而腔体内的空气类似于弹簧。颈部的空气柱和腔体组成一个弹性振动系统,当声波频率和振动系统的固有频率相同时,振动系统就会发生共振。颈部中空气柱与壁面发生强烈的摩擦,使一部分声能转化为热能耗散掉,达到消声的目的。
当噪声的频率低于消声器的第一个高阶模态激发频率时,其内部只有平面波传播,因此计算亥姆霍兹消声器时需要使用平面波理论来进行计算。
亥姆霍兹消声器的共振频率表达式为[16]

式中:c为声速;r为颈部截面半径;l为颈部高度;v为腔体体积;Δl为声学端部修正。
管道横截面积的突变产生了高阶模态波,而这些高阶模态波在平面波截止频率范围内是耗散的,即在传播过程中衰减很快,因此在面积不连续处附近会形成局部的非平面波。为改善平面波理论的计算精度,需要考虑管道横截面积不连续处产生的高阶模态耗散波的影响,于是,在平面波理论计算时,需要将管道的长度用声学长度(等于管道的实际长度加上端部修正量)来代替[17]。

由公式(1)可知,亥姆霍兹消声器的消声频率与其腔体体积有着直接的关系,故可以通过调节腔体体积来实现声衬消声频带的偏移,即:

式中,v为原亥姆霍兹消声器腔体体积(基本体积),ΔV为腔体体积变化量。
由上述分析可知,当亥姆霍兹消声器的结构参数确定后,其消声敏感频率也随之确定,不随着噪声源频率的改变而改变,故需要研发具有结构参数可变的声衬,拓展亥姆霍兹消声器的消声范围。
2 消声器结构设计
消声器的共振频率由其颈部高度、颈部横截面积和腔体的体积共同决定。为了实现共振频率连续可调,提出了一种活塞曲柄连杆机构的消声器机构,通过活塞的直线往复运动而改变共振腔的体积,最终达到消声频带偏移的目的,如图2所示。
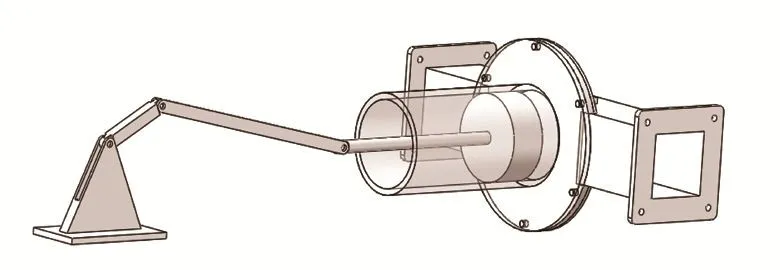
图2 消声器三维示意图Fig.2 Three dimensional schematic diagram of a muffler
通过设置在管道上的传声器,测量出入射声波的频率。当入射声波频率与消声器固有频率不一致时,为了达到最佳降噪效果,活塞应在控制算法的作用下移动,直到系统固有频率与当前入射波频率相同的位置处为止。
根据消声器的设计基础,为保证控制精度以及更大的共振频率变化范围,最终确定消声器腔体直径R=70 mm,腔体高度h=150 mm,颈部直径r=4 mm,颈部高度l=6 mm。为使活塞行程能到达120 mm,设计曲柄长度a=60 mm,连杆长度b=200 mm。
由式(1)可以推得:

式中:R为腔体半径;h1为腔体活塞原来的高度。
为了方便推导,令:

则

可以得到活塞所需移动的位移公式:

式中:G为传导率;S为腔体的底面积;h2为腔体活塞移动后的高度。
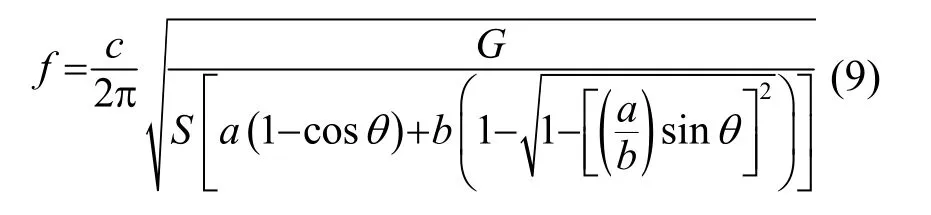
使曲柄绕动中心点与活塞位于同一水平线,初始位置为曲柄与连杆共线,行程L与角位移θ之间的关系为

所以可得曲柄的角位移θ与共振频率f的关系为
使用Matlab软件编写计算程序,通过改变参数值的大小,得出不同参数对消声器共振频率的影响小,结果如图3所示。
由图3(b)可以看出:曲柄在180°内转动可以实现对共振频率的有效控制,其共振频率范围为363~961 Hz。
3 消声器声学性能分析
3.1 仿真分析
使用LMS Virtual.Lab对所设计的消声器进行了声学性能仿真。在相同颈部半径、颈部高度及腔体半径的情况下,分别对腔体高度为30、50、70、90、110 mm的消声器进行传递损失仿真。仿真结果如图4所示。
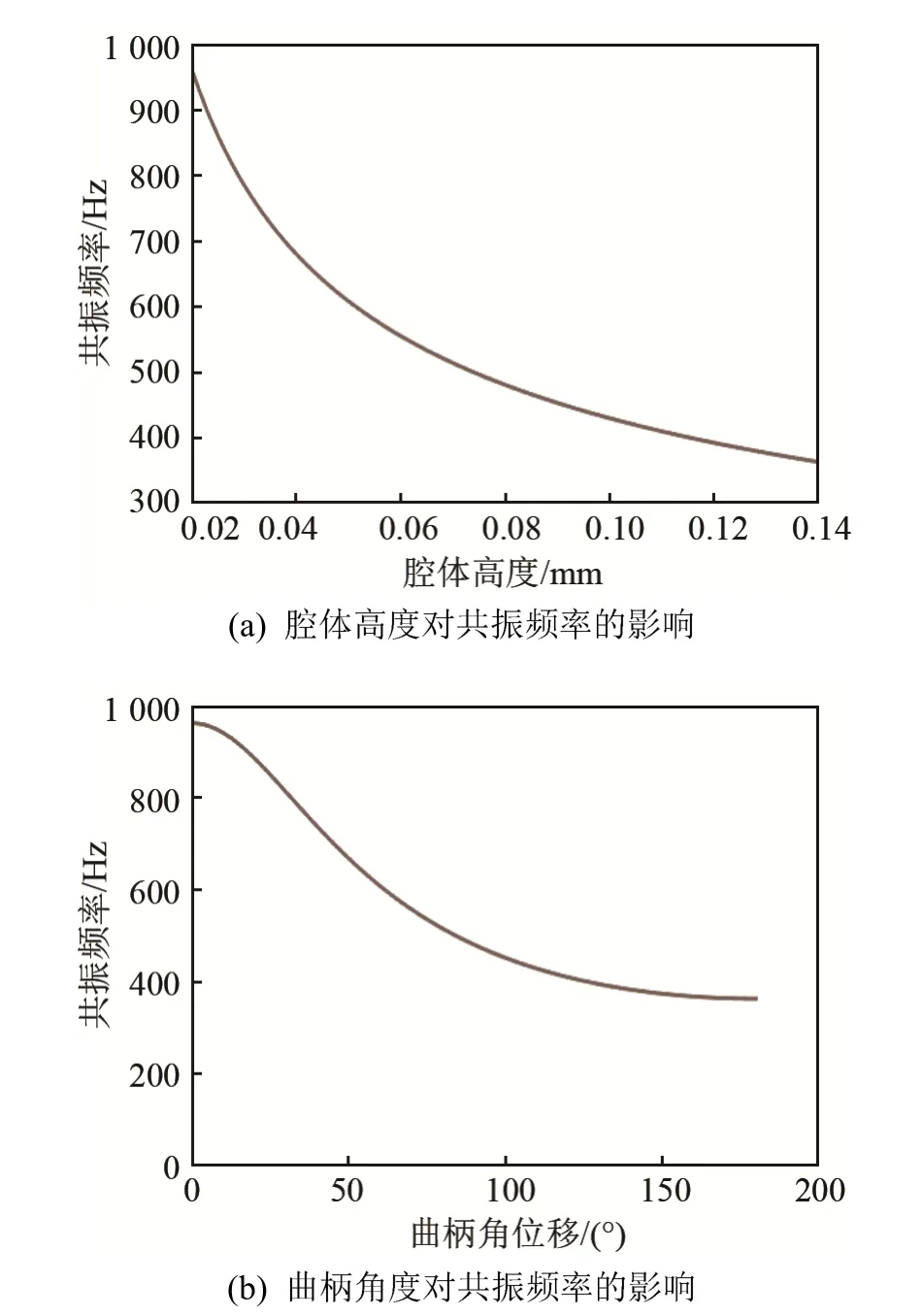
图3 不同参数对消声器共振频率的影响Fig.3 Effects of different parameters on the resonant frequency of muffler

图4 不同腔体高度下消声器传递损失仿真结果Fig.4 Simulation results of the transmission loss of muffler with different cavity heights
从图4中可以看出,在颈部半径、颈部高度及腔体半径不变的情况下,随着腔体高度的增加,共振频率逐渐减小,共振频率最大为800 Hz,共振频率最小为390 Hz。
3.2 实验分析
对消声器的声学性能进行测试。测试中的声音信号为正弦信号,测试频率范围为40~1 315 Hz,频率步长为5 Hz。为了能够使实验结果与仿真结果进行比较,保证颈部半径、颈部高度、腔体半径不变,调节活塞的位移,分别对腔体的高度为30、50、70、90、110 mm的消声器进行声学性能测试,测得消声器的性能结果如图5所示。
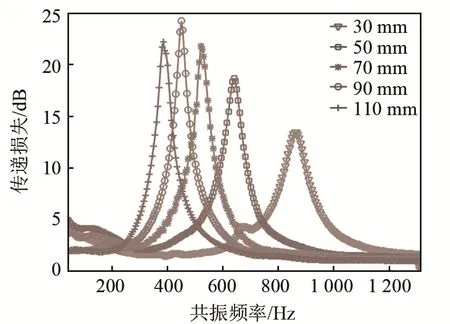
图5 不同腔体高度消声器传递损失实验结果Fig.5 Experimental results of the transmission loss of muffler with different cavity heights
由图5可知,在颈部半径、颈部高度及腔体半径不变的情况下,随着腔体高度的增加,共振频率逐渐减小,与仿真结果一致,共振频率最大为800 Hz,共振频率最小为390 Hz,降噪量最大可达24 dB。
腔体高度与消声器共振频率的实验结果与仿真结果的对比如图6所示。从图6可以看出,随着腔体高度的增加(腔体体积增大),消声器的共振频率减小。这与理论是相符的,可以得出实验误差最大为7.5%,最小为1.3%,为自适应降噪提供了可能与依据。

图6 消声器实验结果与仿真结果对比Fig.6 Comparison between experimental and simulation results of muffler
4 自适应控制算法设计
自适应控制算法是决定所设计的消声器能否实现噪声自适应控制的关键。控制算法的流程图如图7所示。

图7 自适应控制算法的流程图Fig.7 Flow chart of adaptive control algorithm
为达到自适应消声的目的,根据亥姆霍兹消声器的原理,需要采集当时的噪声信号并提取信号的主要频率,将当前噪声频率与消声器的共振频率进行比较,得出步进电机需转动的步数,并将信息输出给电机驱动器,驱使电机转动到目的位置,达到降噪的目的。
LabVIEW是一种具有很高的灵活性和实用性的图形化编程软件,具有强大的数据后处理能力[18]。自适应控制程序在LabVIEW平台上进行编程,控制程序的界面与程序框图如图8、图9所示。

图8 控制程序界面Fig.8 Interface of control program
在图8中,(a)示波器显示消声前后的声音信号,这样便于查看当前的声音信号;(b)示波器显示当前消声器的降噪量,可以实时地反映降噪效果;(c)示波器显示声音的声压级;在圆形表盘中显示当前噪声频率与消声器消声频率的变化。
在图9(a)中,由DAQ9234采集卡采集噪声信号,利用声波分离算法求出噪声的传递损失。经过傅里叶变化,采用寻找最大索引的方法,得到当前的噪声频率。在图9(b)中,将分析出的噪声当前频率与当前的消声频率进行对比,判断电机是否正转或者反转,并将转动信息输出,依次循环,直至活塞到达目的位置(消声器共振频率与噪声频率一致),循环停止。
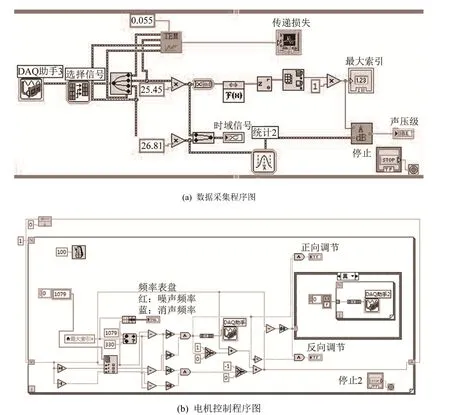
图9 控制程序图Fig.9 Control program diagrams:(a)for data acquisition,(b)for motor
搭建如图10所示的实验测试平台,对自适应可调频亥姆霍兹消声器进行声学性能测试。首先由扬声器发出正弦噪声波,经传声管道传播,被传声器采集,通过LabVIEW软件进行噪声主要频率提取,与当前亥姆霍兹消声器消声频率进行比较。如果噪声主要频率与消声器消声频率不匹配,由数据采集卡发出控制信号,控制驱动器调节步进电机,调节亥姆霍兹消声器的消声频率,使其与噪声主要频率一致。
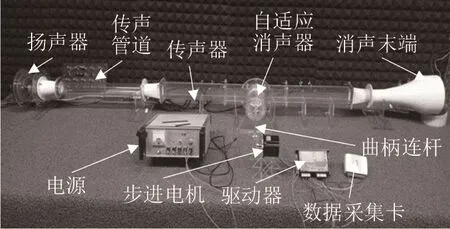
图10 实验测试平台Fig.10 Experimental test platform
实验结果如图11所示。当噪声源主要频率在960~400 Hz范围内变化时,系统调节亥姆霍兹消声器背腔高度,改变其共振频率,使消声效果到达最佳,传递损失高达20 dB;当噪声源主要频率产生变化时,系统从开始动作到完成调节,仅仅用了10 s左右,其收敛速度较之前的实验结果,得到了大幅度的提升。
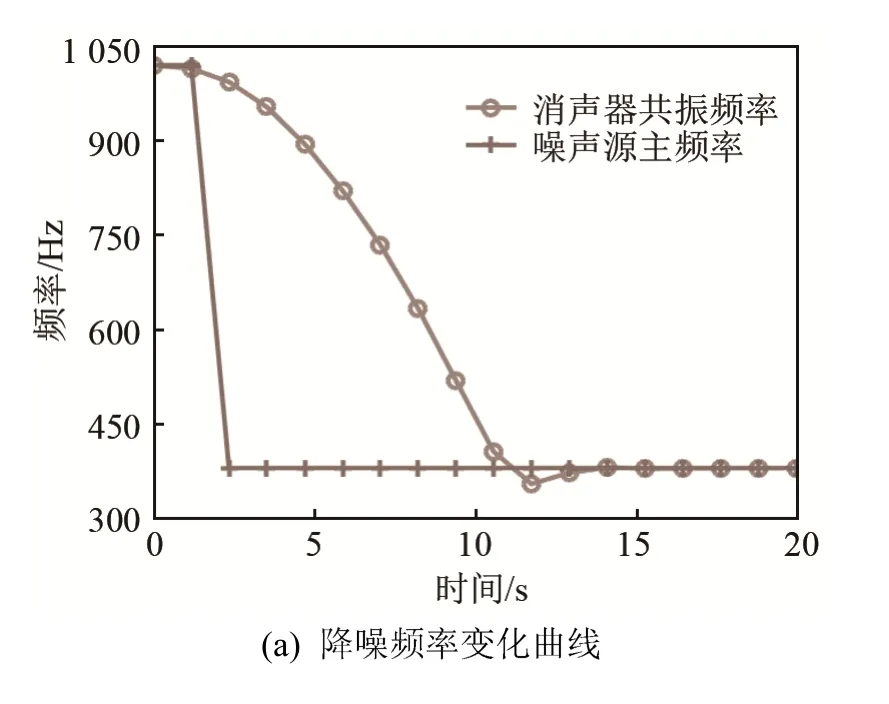
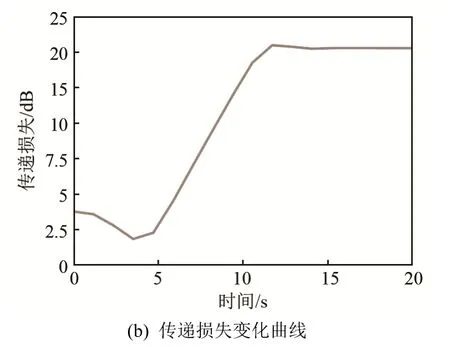
图11 自适应控制实验结果Fig.11 Experimental results of adaptive control
5 结 论
本文在对亥姆霍兹消声器进行理论分析的基础上,分析了各种结构参数对消声器共振频率的影响,提出了一种自适应控制算法,可以依据噪声频率的变化自适应调节亥姆霍兹共振腔的腔体高度,实现多个频率范围内的噪声控制,得出的结论如下:
(1)在传统亥姆霍兹消声器的基础上,分析了消声器的不同结构参数对消声器频率的影响,确定了消声器结构的具体尺寸:曲柄长度为60 mm,连杆长度为200 mm,颈部直径为8 mm,颈部高度为6 mm,共振腔直径为70 mm,腔体高度为150 mm,共振频率范围为390~800 Hz。
(2)使用Virtual.Lab对消声器进行声学性能仿真,并对加工后的消声器进行声学性能测试,最后实验得出的结果与仿真基本吻合。得出消声器消声频率范围为385~860 Hz,降噪量范围为10~24 dB。
(3)通过LabVIEW软件编写声压的采集、分析和自适应控制算法,并进行实验,验证了该系统能够完成宽频噪声的自适应消声,且具有良好的收敛速度。
本文利用步进电机与曲柄连杆机构,设计出频率偏移比高达123% 的自适应亥姆霍兹消声器,实现了自适应可调频消声,若将该系统微型化,可应用于飞机引擎、汽车引擎、潜水艇的消声等领域,具有一定的工程实际意义。
猜你喜欢
装备制造技术(2020年3期)2020-12-25
装备制造技术(2020年3期)2020-12-25
装备制造技术(2020年1期)2020-12-25
噪声与振动控制(2019年6期)2019-12-27
中国环保产业(2019年10期)2019-11-21
轻兵器(2018年12期)2018-12-19
消费导刊(2017年10期)2017-08-08
振动工程学报(2017年1期)2017-04-21
中国舰船研究(2015年2期)2015-02-10
