
面向带电作业的手臂末端输出力评估方法
2019-05-30 01:10林子熊鹏文何孔飞张发辉
南京信息工程大学学报 2019年2期
林子 熊鹏文 何孔飞 张发辉
摘要 为了解决带电作业时手臂末端输出力的准确控制,提出一种基于表面肌电信号(sEMG信号)和支持向量机回归(SVR)实现对手臂末端施力的评估方法.通过手握机械手臂末端的手柄,做往复推拉运动,记录此时手柄处的力传感器的数据F,同时利用3组肌电信号传感器同步采集手臂的肌电信号.将肌电信号提取特征后,与力F组合成样本集合S,在样本集合中随机抽取50%的样本数据作为训练集,分别训练BP神经网络、GRNN神经网络以及SVR神经网络.最后用训练好的神经网络对整个样本集中的力F进行预测,并用均方根误差和相关系数评估模型的预测效果.结果显示,SVR神经网络的预测效果较好,其均方根误差为3.074 0,相关系数为0.951 7.
关键词 带电作业;表面肌电信号;支持向量机;特征提取;回归预测
中图分类号 TP242
文献标志码 A
0 引言
电气设备在长期运行中需要经常测试、检查和维修,带电作业是能避免检修停电,从而保证正常供电的有效措施[1].带电作业根据人体与带电体之间的关系可分为三类:等电位作业、地电位作业和中间电位作业[2].对于高压带电作业[3],操作人员通常穿有绝缘衣和绝缘保护手套,以保证通过人体的电流限制到安全电流l mA或以下,将高压电场限制到人身安全和健康无损害的数值内.带电作业时,操作人员直接与带电线路接触,而穿着绝缘衣和绝缘手套的操作人员通常无法准确感知手臂末端的施力大小,稍有不慎就可能导致带电作业失败,其产生的误操作可能带来不可估量且不可逆的后果.因此,操作人员对于力的准确感知在带电作业中是最为重要的技术指标之一.
表面肌电信号是肌肉收缩时多个活跃运动单元发出的动作电位序列经由脂肪组织容积滤波后,在皮肤表面叠加的结果,它直接反映人体的运动意图[4].随着电子技术的发展使得sEMG(表面肌电信号)得以稳定采集,因此越来越多的学者将其为接口信息构建人机交互系统,以实现机械手臂的闭环控制[5-6].对于目前的高压带电操作机器人[7-8],其控制方式较为单一,在高压带电操作作业上具有一定的局限性.而sEMG 信号在人体的行为识别[9]上已经取得到了较好的应用效果,对于高压带电遥操作机器人,sEMG 信号具有良好的应用前景.在利用sEMG信号实现遥操作机器人的控制时,关键技术在于如何由采集到的sEMG信号准确识别出人体的运动意图,主要包括动作类型、动作幅度大小、动作速度、输出力等多个方面[10].基于sEMG信号的动作识别问题一直是当前的一个研究热点[11-14].基于sEMG信号的输出力大小的预测也是目前的研究热点之一,然而多数对输出力的研究都集中在预测手部握力以及抓取力的大小[15-17],手臂末端的输出力的预测研究却较少.
针对带电作业下的手臂末端输出力的准确感知与控制,本文基于sEMG信号,利用支持向量机回归模型,实现对手臂末端施力进行预测,将采集到的肌电信号提取特征后,与同步采集的力信号组合成一个样本集S.在样本集合中随机抽取部分数据作为训练集,用于训练SVR回归预测模型.最后用样本集检测预测模型,并评估模型的性能.
支持向量机回归 (Support Vector Regression,SVR)算法可以任意精度逼近非线性函数,具有全局极小值点、收敛速度快等优点.与常规人工神经网络方法相比,SVR不存在容易陷入局部最优等问题,提高了泛化能力,因此有较大的优越性[18].
采用ε-SVR算法建立回归关系.首先建立线性回归模型,线性函数为
y=w·x+b,
式中w为权向量,b为偏差.
考虑到拟合误差ε的允许范围,引入松弛因子ζi≥0,ζ*i≥0,则优化目标变为最小化函数:
2 阵列数学模型
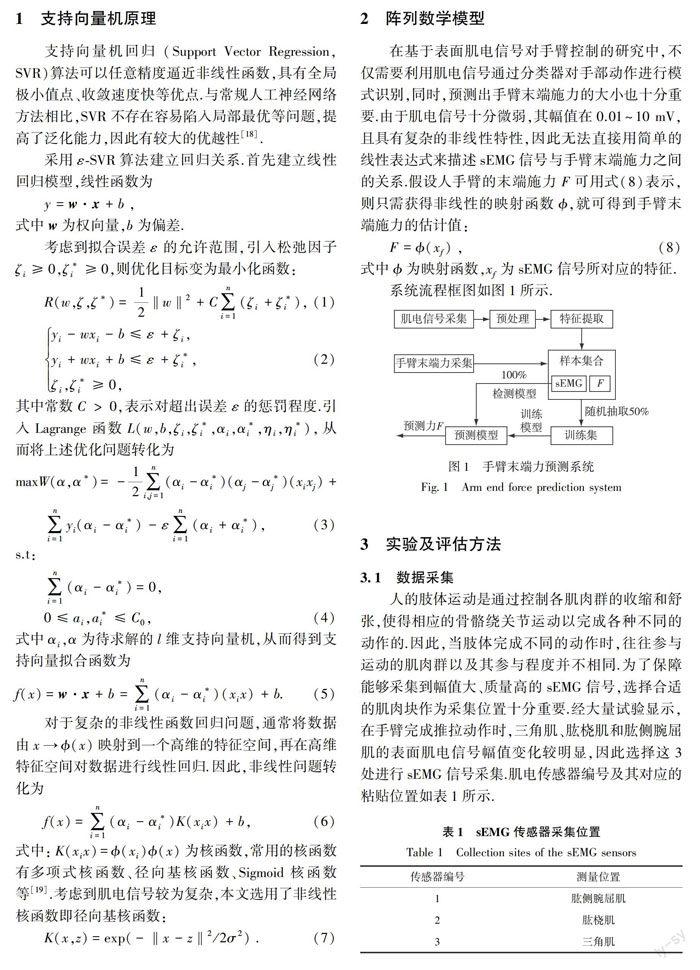
在基于表面肌电信号对手臂控制的研究中,不仅需要利用肌电信号通过分类器对手部动作进行模式识别,同时,预测出手臂末端施力的大小也十分重要.由于肌电信号十分微弱,其幅值在0.01~10 mV,且具有复雜的非线性特性,因此无法直接用简单的线性表达式来描述sEMG信号与手臂末端施力之间的关系.假设人手臂的末端施力F可用式(8)表示,则只需获得非线性的映射函数,就可得到手臂末端施力的估计值:
3 实验及评估方法
3.1 数据采集
人的肢体运动是通过控制各肌肉群的收缩和舒张,使得相应的骨骼绕关节运动以完成各种不同的动作的.因此,当肢体完成不同的动作时,往往参与运动的肌肉群以及其参与程度并不相同.为了保障能够采集到幅值大、质量高的sEMG信号,选择合适的肌肉块作为采集位置十分重要.经大量试验显示,在手臂完成推拉动作时,三角肌、肱桡肌和肱侧腕屈肌的表面肌电信号幅值变化较明显,因此选择这3处进行sEMG信号采集.肌电传感器编号及其对应的粘贴位置如表1所示.
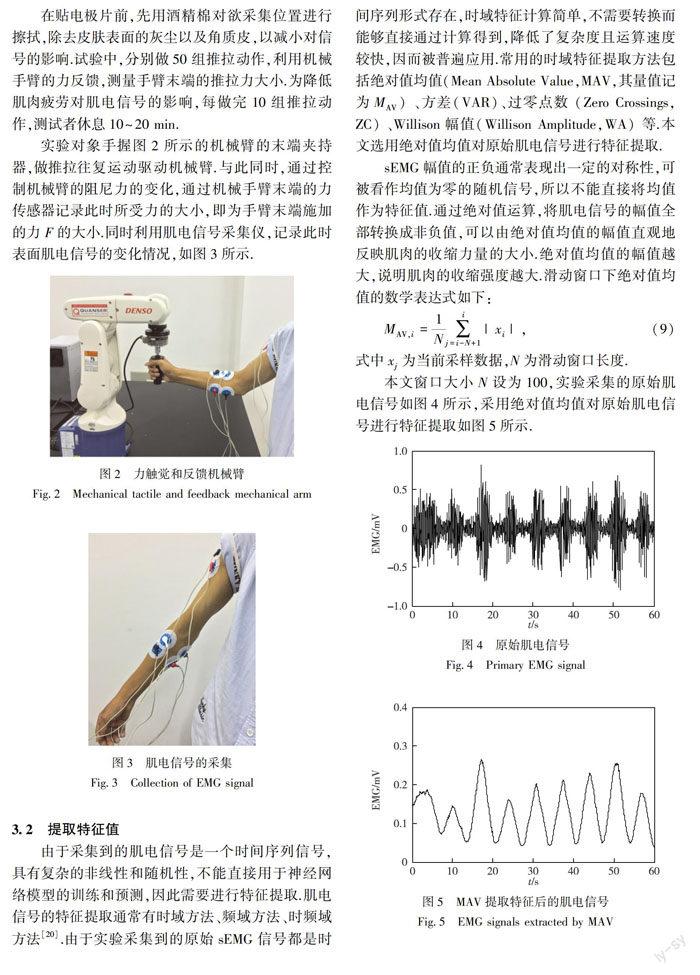
在贴电极片前,先用酒精棉对欲采集位置进行擦拭,除去皮肤表面的灰尘以及角质皮,以减小对信号的影响.试验中,分别做50组推拉动作,利用机械手臂的力反馈,测量手臂末端的推拉力大小.为降低肌肉疲劳对肌电信号的影响,每做完10组推拉动作,测试者休息10~20 min.
实验对象手握图2所示的机械臂的末端夹持器,做推拉往复运动驱动机械臂.与此同时,通过控制机械臂的阻尼力的变化,通过机械手臂末端的力传感器记录此时所受力的大小,即为手臂末端施加的力F的大小.同时利用肌电信号采集仪,记录此时表面肌电信号的变化情况,如图3所示.
3.2 提取特征值
由于采集到的肌电信号是一个时间序列信号,具有复杂的非线性和随机性,不能直接用于神经网络模型的训练和预测,因此需要进行特征提取.肌电信号的特征提取通常有时域方法、频域方法、时频域方法[20].由于实验采集到的原始sEMG信号都是时间序列形式存在,时域特征计算简单,不需要转换而能够直接通过计算得到,降低了复杂度且运算速度较快,因而被普遍应用.常用的时域特征提取方法包括绝对值均值(Mean Absolute Value,MAV,其量值记为MAV) 、方差(VAR)、过零点数 (Zero Crossings,ZC) 、Willison幅值(Willison Amplitude,WA) 等.本文选用绝对值均值对原始肌电信号进行特征提取.
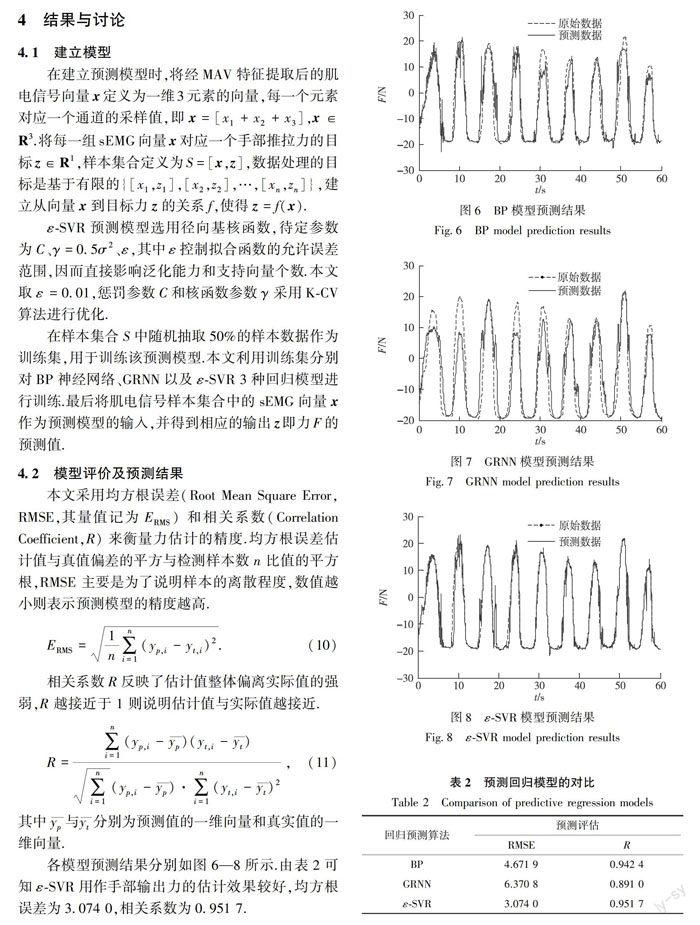
sEMG幅值的正负通常表现出一定的对称性,可被看作均值为零的随机信号,所以不能直接将均值作为特征值.通过绝对值运算,将肌电信号的幅值全部转换成非负值,可以由绝对值均值的幅值直观地反映肌肉的收缩力量的大小.绝对值均值的幅值越大,说明肌肉的收缩强度越大.滑动窗口下绝对值均值的数学表达式如下:
式中xj为当前采样数据,N为滑动窗口长度.
本文窗口大小N设为100,实验采集的原始肌电信号如图4所示,采用绝对值均值对原始肌电信号进行特征提取如图5所示.
4 结果与讨论
4.1 建立模型
在建立预测模型时,将经MAV特征提取后的肌电信号向量x定义为一维3元素的向量,每一个元素对应一个通道的采样值,即x=[x1+x2+x3],x∈R3.将每一组sEMG向量x对应一个手部推拉力的目标z∈R1,样本集合定义为S=[x,z],数据处理的目标是基于有限的{[x1,z1],[x2,z2],…,[xn,zn]},建立从向量x到目标力z的关系f,使得z=f(x).
ε-SVR预测模型选用径向基核函数,待定参数为C、γ=0.5σ2、ε,其中ε控制拟合函数的允许误差范围,因而直接影响泛化能力和支持向量个数.本文取ε=0.01,惩罚参数C和核函数参数γ采用K-CV算法进行优化.
在样本集合S中随机抽取50%的样本数据作为训练集,用于训练该预测模型.本文利用训练集分别对BP神经网络、GRNN以及ε-SVR 3种回归模型进行训练.最后将肌电信号样本集合中的sEMG向量x作为预测模型的输入,并得到相应的输出z即力F的预测值.
4.2 模型评价及预测结果
本文采用均方根误差(Root Mean Square Error,RMSE,其量值记为ERMS) 和相关系数(Correlation Coefficient,R) 来衡量力估计的精度.均方根误差估计值与真值偏差的平方与检测样本数n比值的平方根,RMSE 主要是为了说明样本的离散程度,数值越小则表示预测模型的精度越高.
5 结论
本文针对带电维修作业时的手臂施力控制问题,采用表面肌电信号对手臂实现力控制的需求,提出了一种基于 sEMG和SVR的手臂末端施力的估计方法.在手臂完成推拉动作的同时,对手臂相应肌肉块的表面肌电信号和手部推拉力信号进行同步采集,并对采集到的原始肌电信号提取特征,再将sEMG的特征矩阵作为模型输入,将力信号作为输出目标分别对SVR神经网络、BP神经网络以及GRNN神经网络进行训练,最终利用这些模型通过sEMG预测手臂末端施力的大小.实验结果表明,利用SVR神经网络预测模型,基于表面肌电信号对手部施力的评估效果优于另外两种算法.
参考文献
References〖HJ0.95mm〗
[1] 赵玲亚.高压带电作业机器人运动学分析与仿真[D].天津:天津大学,2007
ZHAO Lingya.Kinematics analysis and simulation of high-voltage live working robot[D].Tianjin:Tianjin University,2007
[2] Al-Timemy A H,Bugmann G,Escudero J,et al.Classification of finger movements for the dexterous hand prosthesis control with surface electromyography[J].IEEE Journal of Biomedical and Health Informatics,2013,17(3):608-618
[3] 魯守银,傅孟潮,厉秉强,等.DWR-I遥操作高压带电作业机器人[J].上海交通大学学报,2005,39(6):910-913
LU Shouyin,FU Mengchao,LI Binqiang,et al.DWR-I teleoperation high voltage live working robot[J].Journal of Shanghai Jiaotong University,2005,39(6):910-913
[4] 张启忠,席旭刚,马玉良,等.基于肌电信号的遥操作机器人控制技术[J].应用基础与工程科学学报,2013,21(6):1199-1209
ZHANG Qizhong,XI Xugang,MA Yuliang,et al.A control scheme based on EMG for teleoperation robot system[J].Journal of Basic Science and Engineering,2013,21(6):1199-1209
[5] 罗志增,杨广映.基于触觉和肌电信号的假手模糊控制方法研究[J].机器人,2006,28(2):224-228
LUO Zhizeng,YANG Guangyin.Prosthetic hand fuzzy control based on touch and myoelectric signal[J].Robot,2006,28(2):224-228
[6] Zhang F,Li P F,Hou Z G,et al.sEMG-based continuous estimation of joint angles of human legs by using BP neural network[J].Neurocomputing,2012,78(1):139-148
[7] 顧毅,杨汝清,宋涛,等.关节式带电清扫机器人的绝缘性及安全性设计[J].机器人,2006,28(2):149-153
GU Yi,YANG Ruqing,SONG Tao,et al.Insulation and safety design of articulated cleaning robot[J].Robot,2006,28(2):149-153
[8] 焦向东,周灿丰,薛龙,等.遥操作干式高压海底管道维修焊接机器人系统[J].焊接学报,2009,30(11):1-4
JIAO Xiangdong,ZHOU Chanfeng,XUE Long,et al.Teleoperation dry high pressure submarine pipeline maintenance welding robot system.[J].Transactions of The China Welding Institution,2009,30(11):1-4
[9] Feng D,Dai L,Chang W,et al.sEMG-Based identification of hand motion commands using wavelet neural network combined with discrete wavelet transform[J].IEEE Transactions on Industrial Electronics,2016,63(3):1923-1934
[10] Ahsan M R,Ibrahimy M I,Khalifa O O.EMG signal classification for human computer interaction:a review[J].European Journal of Scientific Research,2009,33(3):480-501
[11] 张启忠,席旭刚,罗志增.基于非线性特征的表面肌电信号模式识别方法[J].电子与信息学报,2013,35(9):2054-2058
ZHANG Qizhong,XI Xugang,LUO Zhizeng.A pattern recognition method for surface electromyography based on nonlinear features[J].Journal of Electronics & Information Technology,2013,35(9):2054-2058
[12] Phinyomark A,Phukpattaranont P,Limsakul C.Feature reduction and selection for EMG signal classification[J].Expert Systems with Applications,2012,39(8):7420-7431
[13] Young A J,Smith L H,Rouse E J,et al.Classification of simultaneous movements using surface EMG pattern recognition[J].IEEE Transactions on Biomedical Engineering,2013,60(5):1250-1258
[14] 杨大鹏,赵京东,姜力,等.多抓取模式下人手握力的肌电回归方法[J].哈尔滨工业大学学报,2012,44(1):83-87
YANG Dapeng,ZHAO Jingdong,JIANG Li,et al.Force regression from EMG signals under different grasping patterns[J].Journal of Harbin Institute of Technology,2012,44(1):83-87
[15] Cao H,Sun S,Zhang K.Modified EMG-based handgrip force prediction using extreme learning machine[J].Soft Computing,2017,21(2):491-500
[16] Srinivasan H,Gupta S,Sheng W,et al.Estimation of hand force from surface electromyography signals using artificial neural network[C]∥Intelligent Control and Automation.IEEE,2012:584-589
[17] 杨杰,占君,张继传.MATLAB神经网络30例[M].北京:电子工业出版社,2014
YANG Jie,ZHAN Jun,ZHANG Jichuan.Thirty cases of MATLAB neural network[M].Beijing:Publishing House of Electronics industry,2014
[18] 王文剑,门昌骞.支持向量机建模及应用[M].北京:科学出版社,2014
WANG Wenjian,MEN Changqian.Support vector machines modeling and application[M].Beijing:Science Press,2014
[19] Zecca M,Micera S,Carrozza M C,et al.Control of multifunctional prosthetic hands by processing the electromyographic signal[J].Critical Reviews in Biomedical Engineering,2002,30(4/5/6):459
Evaluation of output force at the arm end based on sEMG
LIN Zi1 XIONG Pengwen2 HE Kongfei2ZHANG Fahui2
1 Jiangxi Power Research Institute,Nanchang 330096
2 School of Information Nanchang on Engineering,Nanchang University,Nanchang 330031
AbstractTo facilitate accurate control of the output force at the arm end during live working,a prediction method for arm end force based on surface electromyography (sEMG) and support vector machine regression (SVR) is proposed.By forcing the handle at the end of the manipulator to provide the reciprocating push and pull movement,the data of the force sensor at handle Fare recorded.Simultaneously,the EMG signals of the arm are synchronously collected by three sets of EMG sensors.The feature extraction from the EMG signal and F are combined as sample set S inthe sample collection.Half of the sample data is randomly selected as the training set for different machine learning methods,and trained using the back propagation,generalized regression,and SVR neural networks.Finally,the trained neural network is used to predict force F in the whole sample set,and the prediction effect of the model is obtained by means of the root mean square error (RMSE) and correlation coefficient.The results show that the prediction effect of the SVR neural network is better,the RMSE is 3.074 0,and the correlation coefficient R is 0.951 7.
Key wordslive working;surface electromyography signal;support vector machines;feature extraction;regression prediction
猜你喜欢
经济技术协作信息(2018年33期)2018-12-06
电子制作(2018年19期)2018-11-14
电子测试(2018年18期)2018-11-14
电子测试(2017年23期)2017-04-04
自动化学报(2017年11期)2017-04-04
电子技术与软件工程(2016年20期)2016-12-21
价值工程(2016年32期)2016-12-20
价值工程(2016年29期)2016-11-14
科学与财富(2016年28期)2016-10-14
现代工业经济和信息化(2016年4期)2016-05-17
