基于FPGA的飞行机器人的研究与方案设计
2019-06-11 09:53李世文谢志能
电子技术与软件工程 2019年7期
文/李世文 谢志能
随着通信技术的不断飞速发展,飞行机器人的各项性能和指标都得到了很大程度的改进。国内外对飞行机器人的研究也是越来越热,在这方面的投资力度也非常大。目前来说飞行机器人无论是在民用上还是军事上的应用也是越来越广。
当前飞行机器人在飞行距离近、控制不方便,通信范围小,很难能实现远距离的控制和视频传输方面,同时怎么去降低飞行机器人的功耗,怎么去提高飞行机器人的智能识别效果等都是当前需要解决的难题。结合实际情况,我们在设计方案的时候,采用现阶段的4G通信网络、近距离Wi-Fi通信等方面进行数据和图像方面的传输。在目标检测是识别方面,我们采用FPGA来对目标进行检测是识别,这样可以保证识别的效率,降低功耗。
1 总体方案设计
总的来说,本文的目标是实现一个具有自动对目标进行检测和识别的飞行机器人控制系统,并且进一步提高整个系统的智能识别能力和图像传输的速率。
具体系统方案设计如图1所示,整个系统由飞行器、控制端和上位主机所构成,其中主机与控制的可以通过USB进行通信,可以通过主机显示飞机的飞行状况,同时对飞行器进行相关的参数设置。飞行器主要是由FPGA、无线传输、电机控制、摄像头等所构成。控制端主要用来对飞行器进行控制,它主要包括4G等无线传输模块、控制系统、显示单元。

图1:飞行机器人的设计方案
2 飞行机器人的飞机部分的整体原理图
飞行机器人设计主要包括图像处理、传输和去飞行姿态控制系统,同时对相应目标进行相应的检测和识别。飞行机器人的姿态控制系统的设计目标是保证在飞行的时候能够保持机身稳定,而视频图像的采集与图像的传输,是可以在4G通信网络、射频传输两种机制中切换和接力,当飞行机器人距离远,范围较大的时候可以由4G网络进行图像的传输,因为4G网络经过这么多年基站的建设,网络覆盖非常广,所以对飞行机器人而言采用该传输模式是一种比较好的选择。在飞机控制和图像算法处理中,考虑到FPGA的优越性能,我们采用FPGA来实现数据图像的处理和相应的控制。在飞行机器人的自动检测和目标跟踪方面,目标跟踪和检测可以采用帧差法和数学形态技术来实现,进一步提高系统的目标识别率。
具体来说飞行机器人系统的飞机部分的整体原理图如图 2所示。其中飞机部分包括:摄像头、飞机加速度器、角速度计、气压传感器、数字罗盘、存储单元、电动机、4G模块和Wi-Fi模块等部分。
飞控系统主要有FPGA了控制实现,相应传感器把数据传给FPGA后,FPGA可以通过控制电机进行对当前姿态进行相应的调整,与此同时FPGA把相应的参数发送给控制端的显示器进行显示,同时通过 USB 连接的上位机可以显示飞机的姿态变化。同样通过上位机设置飞行机器人的相应的参数。视频采集与传输系统硬件设计,这里的视频采集与传输系统硬件设计也是采用FPGA的来进行的。该摄像机可以通过无线或者是4G网络将采集到的图像信息实时发送到手机客户端和PC 客户端。所以FPGA需要完成图像实时采集、压缩编码、图像处理和存储等功能。
3 姿态控制系统与图像处理算法
姿态控制是系统的关键,系统上电后,由FPGA对相应的外设进行初始化,初始化后飞机就可以接收控制器发出的控制信息了,如果飞机收到对应的控制信息就由FPGA去控制电机而实现飞机的相关飞行动作,比如说是翻转、偏航、垂直下降与上升。
视频采集流程是这样的,首先系统启动后,由FPGA对摄像头进行初始化,通过I2C对摄像头进行初始化配置,配置好之后图像数据首先保存在FPGA中的WFIFO存储器中,然后通过控制把WFIFO中的数据保存到DDR存储器中,然后FPGA通过RFIFO把熟从DDR存储器中读取出来,进行图像处理,图像处理包括帧差法运动目标检测和跟踪。
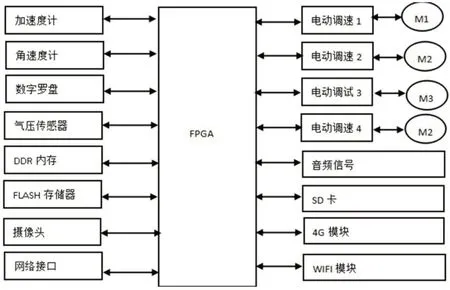
图2:飞行机器人的飞机部分原理图
4 结束语
飞行机器人的设计是一个综合性很强的课题,一般主要包括研究和软件设计,现阶段飞行机器人的性能指标主要包括续航能力,目标的定位和跟踪、和图像的采集和识别能力,飞行路径的规划、图像数据的传输能力等相关技术。针对这种本文提出了一种基于FPGA的飞行机器人的设计方案,由于FPGA的实时性好、运算速度快、可扩展性强,所以在整个系统的设计中利用其来完成相关的图像处理,可以节约系统延时,降低功耗的作用,所以该方案具有较大的应用价值。
猜你喜欢
装备制造技术(2021年1期)2021-05-21
科学咨询(2020年53期)2020-03-19
商品与质量(2019年22期)2019-11-29
科学导报·学术(2019年44期)2019-09-10
制造技术与机床(2018年12期)2018-12-23
电子制作(2018年18期)2018-11-14
自动化学报(2018年2期)2018-04-12
电气化铁道(2016年4期)2016-04-16
北京航空航天大学学报(2016年3期)2016-02-27
赤峰学院学报·自然科学版(2014年1期)2014-03-23