
基于领导跟随一致性理论的队形保持策略*
2019-06-13 10:57胡朝晖王骁飞
火力与指挥控制 2019年5期
胡朝晖,李 聪,王 勇,周 欢,王骁飞
(1.西京学院机械工程学院,西安 710123;2.空军工程大学航空工程学院,西安 710038)
0 引言
多无人机编队作战可提高无人机的突防能力、电子对抗能力、对目标搜索能力和识别能力,以及攻击效能等,提高任务完成的整体效率,必将成为未来空战的主要形式之一[1]。队形保持,即多无人机协同执行作战过程中因特定任务需求或减少油耗等原因,需在飞行过程中保持特定的编队队形。现阶段比较常用的队形保持控制策略主要有:长机-僚机法,基于行为法、虚拟结构法以及人工势场法等[2]。根据文献[3]的思路可知,若将一致性控制协议中的状态值分别赋予不同含义的物理量,则可将上述常用的队形保持控制策略统一于一致性理论的框架之内。
现阶段关于一致性理论的研究成果颇丰,但大多数文献所提出的一致性控制协议因限制条件的引入,而阻碍了理论成果在工程实践过程中的推广和应用。文献[4]以简化的智能体模型为基础,提出了二阶时延一致性控制协议,然而实际作战中无人机的行为不仅受到编队内其他无人机的影响,而且也受到其固有的非线性动力学特性的影响,本文则引入了描述无人机非线性动力学特性的方程,以构造二阶非线性模型,并以此为基础对一致性控制协议进行设计和讨论;文献[5]以固定的通信拓扑结构描述智能体之间的通信情况,而未深入研究实际环境中必然存在的通信延迟,以及通信拓扑结构变化等情况。多无人机协同作战过程中,编队内无人机因为任务需求、通信链路故障或障碍物等因素的影响,通信拓扑结构必然会随时间而发生变化,为了解决这种问题,本文对切换拓扑结构下的一致性控制协议进行了讨论研究。领航跟随结构是生物系统中常见的节能机制,并且其能够加强群体的通信和导向[6],在描述编队问题时,常将一致性控制协议和领航跟随结构相结合,编队作战中只需对有限的领航者施加影响,便可实现整个编队达到预期状态。领航者为一特殊个体,其运动独立于编队内其他无人机,而其他无人机则尽量跟随其状态,此种问题称为领导跟随一致性问题。领导跟随一致性问题研究中主要分为:具有真实领导者的一致性问题和具有虚拟领导者的一致性问题。相比于编队内存在的真实领导者,虚拟领航者的引入,不仅可降低和减少任务分配的难度和工作量,产生较高的控制精度,而且在多无人机协同作战中可防止因打掉关键节点——编队中的真实领航者而导致整个编队作战失败的情况,因此,采用虚拟领航者的领导跟随一致性控制协议更加符合实战需求。
本文以领导跟随一致性理论为顶层控制策略,以无人机编队保持为应用对象,在分布式结构指导下,形成一个完整的多无人机编队队形保持的体系结构。为了推动一致性控制协议在工程实践中的应用,针对队形保持问题,提出了二阶非线性切换拓扑结构下的领导跟随一致性控制协议,并利用构造的利亚普诺夫函数和线性矩阵不等式,给出了判据及相应的稳定性证明。仿真结果验证了理论分析的正确性以及队形保持控制协议的有效性。
1 预备知识
1.1 图论
多无人机编队中无人机之间的通信情况可以采用权重有向图进行描述。令为一权重有向图,其中为有向图顶点的集合;为有向图的边,表明第i架无人机接收来自第j架无人机的信息;为邻接矩阵,且对于所有的,。定义为与第i架无人机相邻的所有无人机的集合。
1.2 引理
本部分引入后文需要使用的引理。
引理1[7]
令α∈R,A,B,C,D 为具有相同维度的矩阵,则Kronecker积具有以下性质:

引理2[8]
定义线性矩阵不等式(linear matrix inequality)为
2 多无人机编队分布式控制系统结构
多无人机编队飞行过程中为了保持一定的几何队形,无人机之间必然存在信息的交互。现阶段多无人机编队中的信息交互方式主要有集中式、分布式和分散式3种,各有利弊[9]。多无人机在飞行过程可能会遇到任务变更、无人机故障,以及部分成员被敌方击落等突发情况,从而需要一种扩充性和容错性较好,可将以上突发情况带来的影响限制在局部范围内的一种信息交互方式,分布式信息交互方式因构造简单可靠,信息量小而较易避免信息冲突,以及结构在工程上便于实现和维护的特性而成为首选。
分布式控制信息交互是指编队中的每架无人机需将自身的位置、速度和姿态等信息与其相邻的无人机进行交互。结合后文设计的一致性控制协议提出多无人机分布式控制系统结构如下页图1所示。
由图1可知,编队内无人机将自身状态信息传递给一致性管理器,一致性管理器则借助一致性控制协议,产生使多无人机编队保持预期几何编队队形的各个无人机每时每刻需要达到的物理量的参考值。

图1 多无人机分布式控制系统结构示意图
3 队形保持一致性控制协议的设计与分析
3.1 问题描述
考虑包含N架无人机的编队,第i架无人机的二阶非线性动力学方程为:

多无人机编队中虚拟领航者的动力学方程可描述为:

对于编队中处于任意初始状态的无人机,如果满足式(3),则称多无人机保持了期望的几何编队队形。
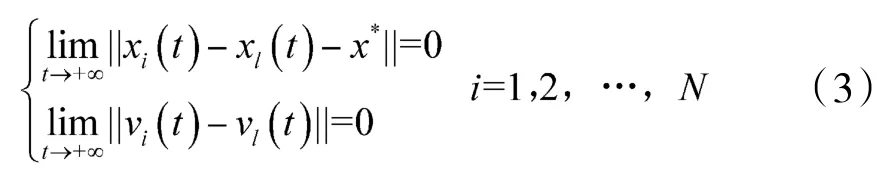
其中,x*为队形向量,表示第i架无人机为了实现预期编队队形,而需和虚拟领导者之间保持的相对间隔距离。当x*=0时即为普通的一致性控制协议。
为了获得后期推导的方便,引入假设如下:

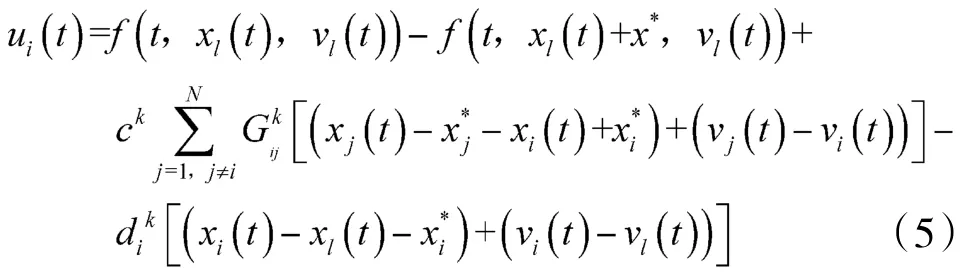
3.2 切换拓扑结构下的领导跟随一致性控制协议
为了实现多无人机编队队形保持,提出应用于编队保持过程中的领导跟随一致性控制协议如下:
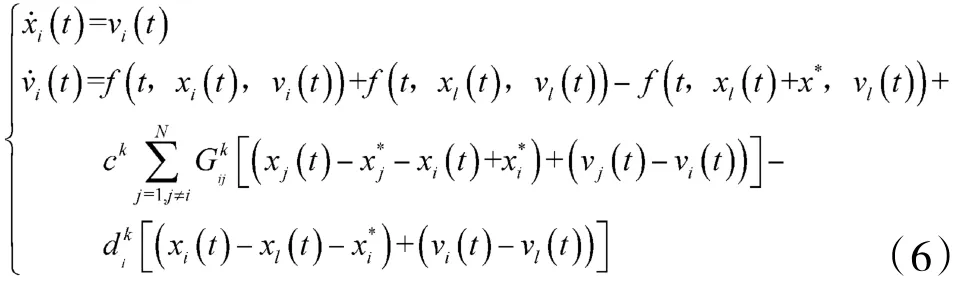
将式(5)代入式(1)可得闭环系统为

利用Kronecker积可将式(7)写成矩阵的形式:
定理1:在式(4)成立的前提下,当满足如下条件时,多无人机编队系统式(1)可实现预期的编队队形:

证明:式(9)和式(10)以及引理 2可得

针对式(8)选取利亚普诺夫函数为:

由式(12)可得,利亚普诺夫函数式(13)满足V(t)≥0,而且当且仅当时 V(t)=0。
对 V(t)结合式(8)求导可得式(14),如下所示:
另外根据假设式(4)可以得到:
由式(14)和式(15)可以得到

4 仿真
4.1 仿真环境设置
设置编队内4架无人机的二维初始位置、二维初始速度和无人机性能指标,分别如下页表1和表2所示。
假设4架无人机在执行任务期间可能出现的通信拓扑结构如图2所示。通信拓扑图每隔1 s切换到下一个拓扑图,切换顺序为。权重矩阵设置如下:

表1 UAV初始状态

表2 UAV性能指标
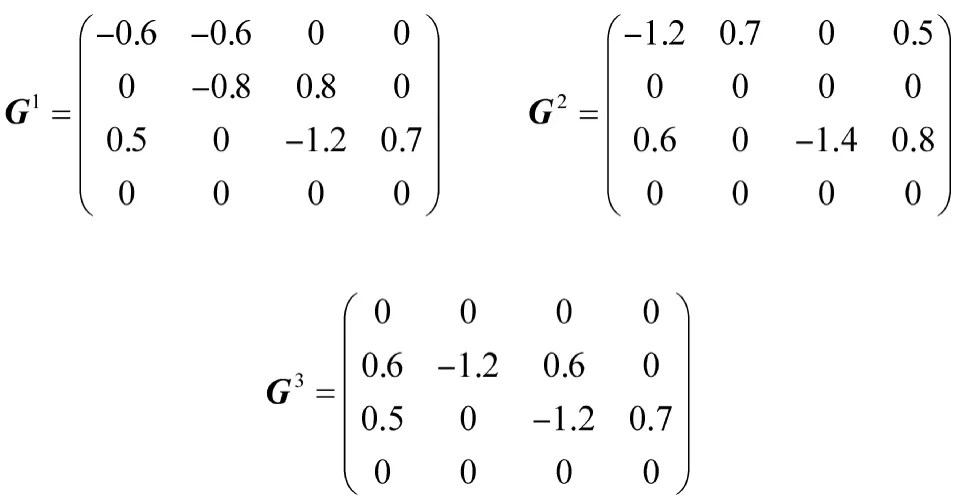

图2 通信拓扑图
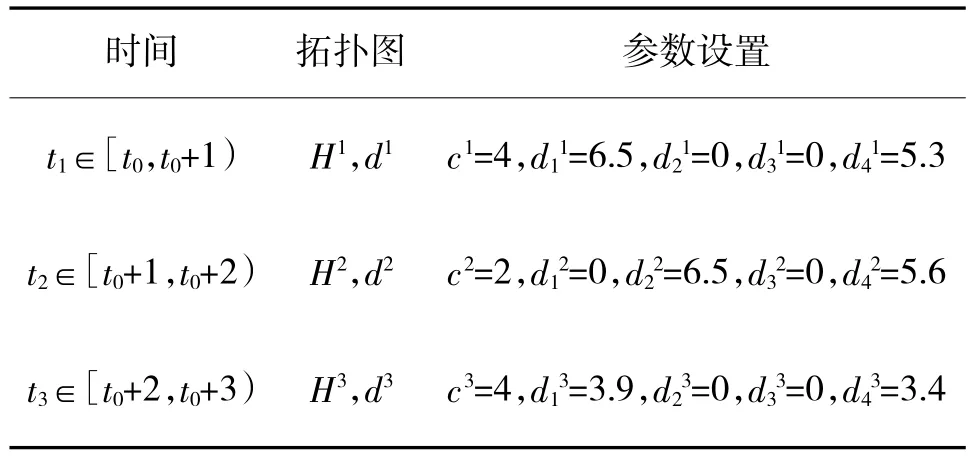
表3 不同阶段仿真参数设置
4.2 仿真结果
利用式(5)所示的编队保持一致性控制协议,引导4架具有动力学方程式(1)的无人机从初始状态出发至最后形成矩形队形。基于4.1节设置的仿真环境,最终可得4架无人机的位置和速度的变换曲线如图3所示。
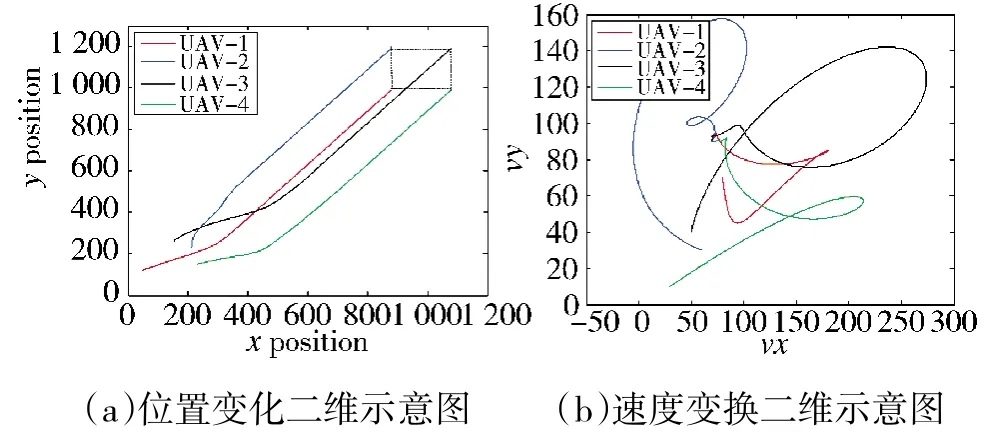
图3 多无人机位置和速度变化示意图
由图3分析可知,在控制协议式(5)的作用下,4架无人机从各自的初始位置以初始速度出发经过一段时间后,可最终收敛至虚拟领航者指定的二维参考速度(70,90),即 Vx=70,Vy=90,并以队形向量决定的矩形几何构型编队飞行。
5 结论
为了解决多无人机以特定几何构型编队飞行的问题,本文以二阶非线性模型为研究对象,提出了切换拓扑下的领导跟随一致性控制协议以实现编队队形保持,并给出了相应判据和证明。仿真结果验证了本文所提控制协议的正确性和有效性。后期主要对编队飞行过程中存在的时延问题进行研究,以进一步推进其在工程实践中的应用。
猜你喜欢
辽宁教育(2022年19期)2022-11-18
汽车实用技术(2022年9期)2022-05-20
中等数学(2021年9期)2021-11-22
控制与信息技术(2021年2期)2021-07-23
疯狂英语·新悦读(2021年1期)2021-01-27
科学导报·学术(2020年26期)2020-10-21
作文大王·低年级(2019年6期)2019-08-01
妇女(2018年7期)2018-09-19
数学学习与研究(2017年20期)2018-01-02
中学数学杂志(初中版)(2016年3期)2016-06-24
