尾桨升降转速自然激励固有频率识别方法研究
2019-06-19 07:15王正峰赵文梅李燕秀
直升机技术 2019年2期
王正峰,赵文梅,李燕秀
(1.海军驻南昌地区军事代表室,江西 南昌 330001;2.中国直升机设计研究所,江西 景德镇 333001)
0 引言
直升机尾桨固有频率是直升机旋翼系统动态设计中一个重要的参数,它直接影响尾桨性能甚至全机振动水平,因此在设计阶段需要合理配置尾桨各阶模态频率。由于受尾桨构型和具体结构,复合材料的分散性及工艺不稳定性,孤立旋翼动力学计算时未考虑机身、扭振系统等因素的影响,尾桨固有频率理论计算结果与实际值可能存在一定的偏差,故通过尾桨旋转状态动特性试验测试尾桨固有频率成为尾桨研制工作的重要环节之一,也为后续设计改进、改型提供试验依据。
国内外旋翼学者对旋转状态下旋翼固有特性测试工作开展了广泛研究。文献[1]-[6]分别对UH-1D、“虎”式直升机旋翼、S-76无轴承旋翼、“Comanche”无轴承旋翼、EC155旋翼、Yamaha R-50无人直升机旋翼开展了旋翼固有特性试验,但上述文献未提供固有频率测试与识别的详细方法。
黄珺、邓景辉等人[7]进行了全尺寸旋翼固有特性测试工作,旋翼在旋转状态下通过自动倾斜器激振,对应变响应进行分析,找出其固有频率,针对旋翼试验中干扰因素多等特点,提出了一种将时域数据分段处理的新方法。尹春望与黄建萍等人[8]采用激振器阶梯式扫频方式识别直升机动部件综合系统动力特性,这种泛扫频结合精扫频的频率识别技术既能避免识别频率的遗漏,又能保证一定的试验精度。周云与胡和平[9]通过将固定坐标系下的激励位移信号与旋转坐标系下的桨叶响应信号同步采集、激励位移信号坐标系转换、激励响应信号重采样处理等步骤,发展了基于传递函数分析的旋转桨叶固有频率识别方法,并进行了试验验证。
传统旋翼动特性识别激励输入一般采用激振器[7-9],激振频率一般小于50Hz。考虑直升机尾桨的转速比较高,故某阶固有频率有可能比激振器激励频率大。为解决传统激振器激励方法不能识别高于50Hz尾桨频率的问题,本文发展了基于升降转速自然激励的尾桨固有频率识别方法,并通过某型机尾桨动特性试验,进行尾桨固有频率识别分析与考核验证。
1 升降转速自然激励固有频率识别方法
1.1 基本原理
结合共振图说明升降转速自然激励固有频率识别方法的基本原理。图1为某型机尾桨共振图,随着尾桨转速变化,当气动谐波自然激振频率与模态固有频率重合时,必然引起共振。在共振图中虚线为前8阶气动谐波,粗实线为前3阶固有频率比,虚线与实线的交点为理论共振点。试验过程中,共振在信号输出上的表现是该阶谐波分量的载荷突增,通过谐波分析识别出共振点以及对应的谐波。图1中圆点为识别出的共振点,由于前三阶固有频率比曲线相隔较远,共振点为哪阶固有频率很好判断。
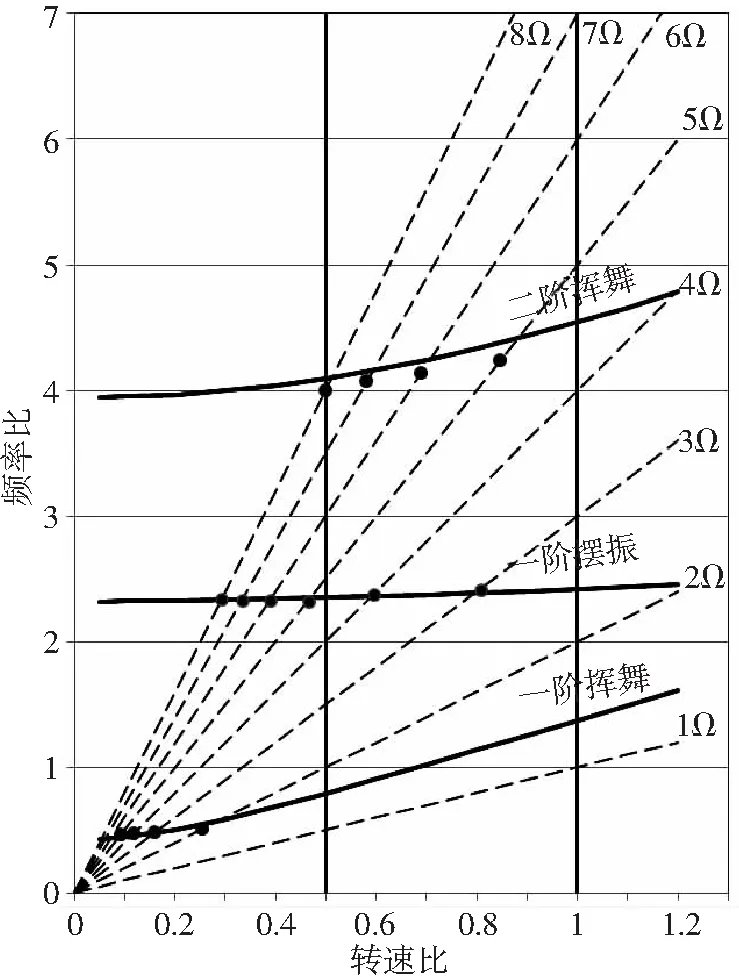
图1 某型机尾桨共振图
1.2 数据处理
结合尾桨叶振型图,在尾桨叶载荷敏感点贴电阻应变片测量载荷,采用光电传感器或磁传感器测量尾桨的相键信号,载荷信号与相键信号同步采集。
利用MATLAB软件编译数据处理分析源程序,主要包含三部分内容:相键信号处理,采用傅里叶变换对载荷进行谐波分析,绘制各阶谐波随转速变化的曲线。主要流程如图2所示。
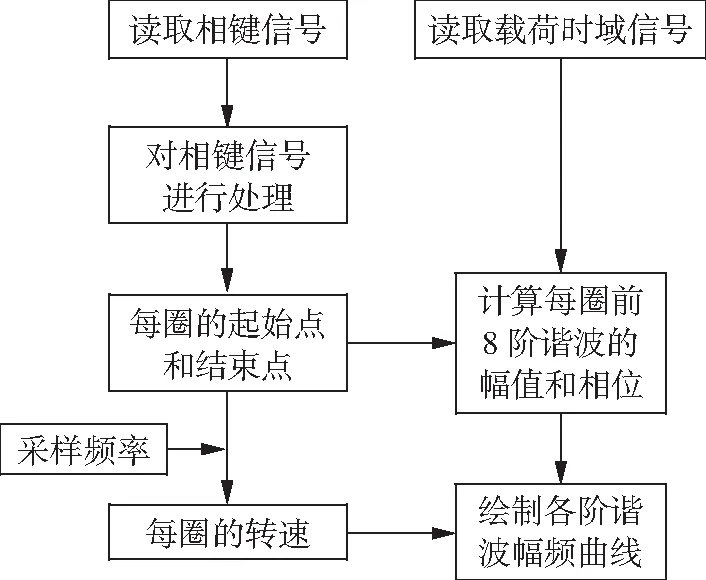
图2 数据处理流程图
1.3 共振点判断准则
多次试验的结果峰值应具有重复性,对于不具有重复性的幅频曲线放弃不用。从图3给出的某两个信号重复性检查可以看出,图3(b)的重复性不好,放弃不用;图3 (a)的一致性较好,可以进行后续分析工作。因此识别共振点的第一个准则:共振点应具有重复性。
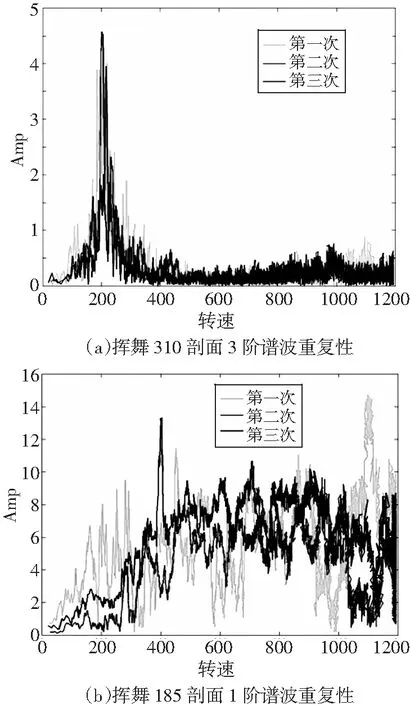
图3 信号重复性检查示意图
将共振点在共振图中标出,如图1所示,可以初步判断共振点是哪阶固有频率。理论计算的振型图与不同展向位置载荷测试点的相位对应关系应具有合理性,理论计算的振型二阶导数图与不同展向位置载荷测试点的幅值对应关系应具有合理性,此为共振点识别的第二个准则。
使用共振点判断准则,共识别出14个共振点,如图1圆点所示。
1.4 额定转速下固有频率推算
识别出的共振频率一般是低转速下的固有频率,但最关心的是额定转速下的固有频率。如果某阶固有模态在多个转速下都有识别频率,将多个频率偏差进行平均,然后将额定转速下的理论计算值也做相同的偏移,认为偏移后的频率即为间接识别出的额定转速下的固有频率。
2 识别技术验证
2.1 试验过程简介
为验证所发展的基于升降转速自然激励的尾桨固有频率识别方法的可行性,在某尾桨台开展了某型机尾桨在不同升降转速速率下的动特性试验。试验基本参数如下:
1)试验共开展了三个不同升降转速速率的动特性试验,分别为5rpm/s,10rpm/s,20rpm/s,且每个升降转速速率的试验重复3次;
2)挥舞载荷测试剖面为185、310、845、970四个剖面,且摆振载荷测试剖面与挥舞载荷测试剖面相同,数据采样率为2048次/s,尾桨额定转速为1100rpm。
2.2 试验结果及其分析
从转速激励的原理来看,升降转速速率越小,在共振点附近旋转自激励的次数越多,更易于识别出共振点,但是载荷也更大,对桨叶的损伤越大,故确定合适的升降转速速率非常必要。试验结果显示,升降转速速率为5rpm/s时,识别出的共振点共有14个,10rpm/s时识别出的共振点仅6个,20rpm/s识别出的共振点更少。图4给出了不同升降转速速率幅值的对比,可见5rpm/s的峰值比较突出,且信噪比与一致性较好,且最大载荷在桨叶可承受最大载荷范围之内,因此采用5rpm/s的升降转速速率能够满足试验需求。
为考核基于升降转速自然激励固有频率识别方法的有效性,在某型机尾桨台架试验时,同时采用了传统激励器激振法进行尾桨旋转状态动特性试验。传统激励器激振方法只能识别出尾桨一阶挥舞和一阶摆振频率(低于50Hz)。表1给出了采用本文方法及激励器激振法获得的试验结果与理论计算结果对比分析。

表1 某型机尾桨额定转速下动特性试验值与理论值对比分析
从表1的对比分析结果可以看出:
1)采用本文方法与激励器激振法的识别结果之尾桨一阶挥舞和一阶摆振频率(低于50Hz)吻合较好;
2)采用本文方法可以识别出挥舞二阶固有频率(高于50Hz),而受限于激振器激励水平,激振法无法识别挥舞二阶固有频率,这也是本文方法的意义所在。
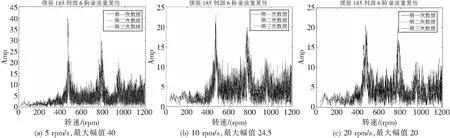
图4 不同升降转速速率幅频曲线对比
3 结论与展望
为弥补传统激励器激振固有频率识别方法的不足,发展了一种基于升降转速自然激励法的尾桨固有频率识别方法。详细介绍了该方法的技术途径,包括数据处理基本原理、MATLAB程序编写、共振点判断准则及额定转速下固有频率推算等。通过某型机尾桨旋转状态动特性试验,验证升降转速自然激励法的尾桨固有频率识别方法,并与采用激振器激励法得到的频率进行对比分析。分析结果表明该方法可行,识别结果可信。所发展的尾桨固有频率识别方法研究属于创新性的通用技术,具有广阔的应用前景,可广泛应用于各型号直升机尾桨研制。
猜你喜欢
机械传动(2022年10期)2022-10-21
金桥(2022年1期)2022-02-12
北京航空航天大学学报(2021年9期)2021-11-02
兵器装备工程学报(2021年7期)2021-08-06
北京航空航天大学学报(2021年6期)2021-07-20
军民两用技术与产品(2021年9期)2021-03-09
意林(绘英语)(2018年2期)2018-11-29
当代陕西(2018年12期)2018-08-04
人大建设(2017年6期)2017-09-26
科技视界(2016年16期)2016-06-29