基于GSO算法的自适应随机共振轴承故障诊断
2019-06-25 12:20袁丛振胡定玉
噪声与振动控制 2019年3期
方 宇,袁丛振,胡定玉
(上海工程技术大学 城市轨道交通学院,上海201620)
窗体底端滚动轴承是车辆必不可少的零部件,它承受着车辆大量的附加载荷,因此轴承产生故障的频率较高。轴承发生故障使车辆存在安全隐患,所以对轴承故障弱信号的检测意义重大[1]。在强噪声背景下(噪声强度D>1),目前轴承故障弱信号的提取方法较多采用抑制噪声,如小波变换方法、经验模式方法、局部均值方法等[2]。但这些方法在降噪的同时也削弱了轴承故障弱信号,较难有效检测出轴承故障弱信号。随机共振可解决此弊端,具有可把一部分噪声能量转移给信号的优点,实现同步削弱噪声和增强弱信号特征的效果。但传统自适应随机共振方法只能单一地调节某个系统参数,忽视了参数之间的交互作用,因此存在一定的局限性。
随着群智能优化算法的兴起,通过群智能算法寻找全局最优解可解决传统自适应随机共振系统的局限性。雷亚国等利用蚁群智能算法优化系统参数,提取出了轴承故障弱信号[3]。张仲海等运用粒子群智能算法优化系统参数,实现了轴承故障弱信号的检测[4]。朱维娜等利用人工鱼群智能优化算法优化系统参数,检测出了轴承故障的特征频率[5]。崔伟成等利用果蝇智能优化算法优化系统参数,实现了轴承内圈故障诊断[6]。
GSO 算法具有可对种群自动划分、处理多极值的能力,同时具有较高的通用性与多样性的优点,本文提出利用GSO 算法优化系统参数。首先按固定频率压缩比压缩频率;然后把传统方法输出信噪比作为GSO算法的初始荧光素,利用GSO算法得到最优结构参数a,b;最后通过双稳随机共振系统的输出信噪比检测轴承故障弱信号是否增强,通过系统输出信号的时域图检测信号的周期性,通过功率谱检测弱信号是否得到提取。
1 基本理论
1.1 双稳随机共振
双稳随机共振系统包含了三部分:输入信号、干扰噪声、非线性系统[7]。数学模型为非线性朗之万方程

式中:s(t)=Acos(wt)为幅值A<<1 的微弱信号,n(t)为均值为零的高斯白噪声,须满足E[n(t)n(t+τ)]=2dδ(t-τ);H′(x)为势函数导数,系统势函数为

势阱高度ΔH=a24b决定系统发生共振的难易程度[8],ΔH与a2成正比,与b成反比。因此必定存在一组最优参数a,b可使随机共振输出信噪比达到最高[9]。
1.2 GSO算法
GSO算法的原理是根据萤火虫向荧光素比自身高的位置移动,当某个萤火虫的荧光素越高,对其他萤火虫吸引力就越大[10]。同时两萤火虫之间的距离越近,吸引力也就越大。初始化算法参数后,每只萤火虫都有自身动态决策域半径,首先每只萤火虫每次只能向决策域半径中荧光素最高的萤火虫移动,然后通过计算概率来更新动态决策域内某萤火虫位置,最后更新决策域,决定最高荧光素的萤火虫[11]。
1.2.1 更新荧光素阶段
适应度函数值J(xi(t))与荧光素li(t)具有一定关系,具体关系如下

其中:ρ,γ分别为荧光值权值,函数值权值,取值在0到1之间。xi(t) 为通过第t次迭代计算后的第i只萤火虫所在的位置。
1.2.2 动态决策域和移动概率
决策域决定了萤火虫自身控制范围,决策域越大,萤火虫自身控制范围也越大。决策域随每次迭代都在动态变化,Ni(t)表示第t代萤火虫i的动态决策域,萤火虫j向Ni(t)内移动概率pij(t)。具体计算公式为
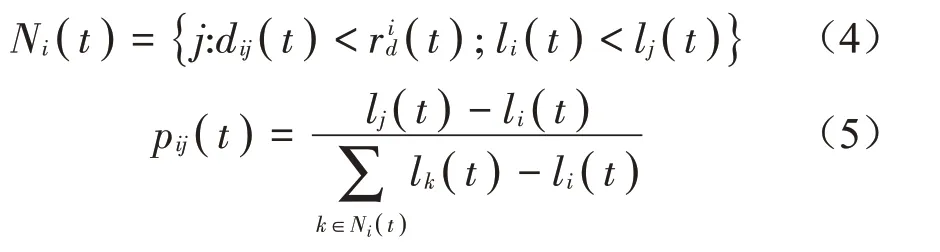
式中:rdit(t)为第t代萤火虫i的动态决策域半径,lj(t)是萤火虫j的荧光素值。
1.2.3 更新位置
由于萤火虫i移动到萤火虫j位置后,需更新萤火虫位置。更新的萤火虫位置为

其中:s为位置更新权值。
1.2.4 更新动态决策域半径
由于萤火虫移动后,其决策域会发生改变。因此需要更新决策域,具体公式如下

式中:β表示更新因子,β越大,更新的半径也越大。nt表示初始阈值,|Ni(t)|表示萤火虫个数。因此更新的决策域半径由更新因子、初始阈值以及萤火虫个数共同决定。
2 基于GSO算法的自适应随机共振
输出信噪比大小可以检测轴承故障弱信号是否增强。数值越大,增强性就越好。其计算公式如下

式中:S(f0)为信号功率;N为所有噪声总功率。本文运用输出信噪比检测轴承故障弱信号是否增强,具体步骤如下:
①初始化GSO算法参数。例如荧光素挥发因子、适应度提取比例、邻域阀值、步长、荧光素浓度、感知半径、决策半径等参数。
②把以传统自适应随机共振方法输出的信噪比设置为萤火虫的适应度初始值,并根据式(3),更新GSO算法中的荧光素值。
③根据式(4)和式(5)计算动态决策域和移动的概率,并用轮盘赌选择法选择萤火虫个体,使用式(6)进行位置更新。
④使用式(7)更新萤火虫动态决策域半径。
⑤直至算法达到最大迭代次数,得到最优的参数a,b。
⑥将最优a,b代入系统,通过式(8)计算出输出信噪比,判断信号是否增强。如图1为基于GSO算法的自适应随机共振流程图。
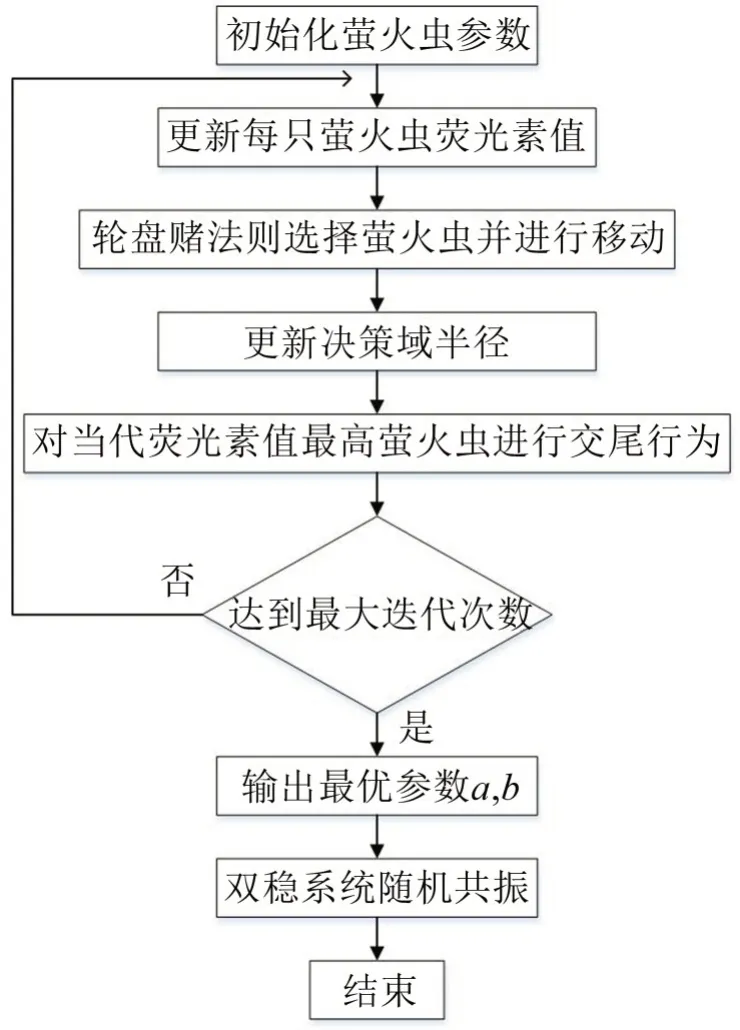
图1 GSO算法的自适应随机共振流程
3 仿真验证
本文设定系统的输入信号为一周期性信号,设定幅值A0为0.3,频率f0为5 Hz,初始相位为0,加入的噪声为零均值的高斯白噪声,噪声强度D为6,采样频率fs设定为1 024 Hz,采样时间为4 s。为了在功率谱中方便分析信号,本文只分析0~100 Hz 的频率。如图2为原信号特征图,功率谱中可根据fs=fsr*R,f0=f0r*R进行信号频率还原。在图2(a)上无法观察出任何周期性信号,在图2(b)上可以观察出在频率5 Hz处存在一个不明显的谱线,已被噪声频率覆盖,同时在其他频率处也存在很多其他噪声谱线。
在该仿真实例中,由于输入信号频率大于1 Hz,不符合随机共振系统输入条件,因此需通过二次采样使其转化频率远小于1的信号。本文设置频率压缩率R为200,则二次采样频率fsr=fsR为5.12 Hz,特征频率压缩为f0r=f0R为0.025 Hz。初始化系统参数a为1,b为1,此时,系统的输出信噪比为-23.764 6 dB。
如图3为系统参数a=1,b=1时系统输出特征图。从图3(a)中可以观察到很弱的周期性信号,在图3(b)上可以观察出存在特征频率5 Hz的谱线,其他噪声谱线有了一定的减少。

图2 输入信号特征图
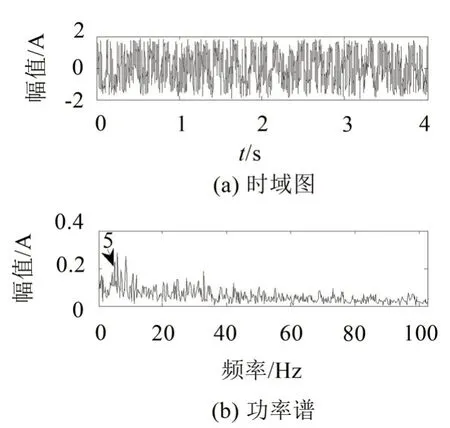
图3 系统参数a=1,b=1时系统输出特征图
采用传统调节方法处理该仿真信号,本文固定a为1,设定b的范围为[0.1~5]。改变b,最后得b为0.141 时,输出信噪比最大为-10.810 8 dB。如图4为传统方法调节系统输出特征图。
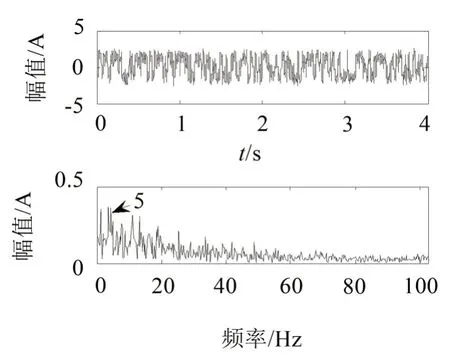
图4 传统方法系统输出特征图
从图4(a)中可以观察到图中含有明显的周期性信号,在图4(b)上可以观察出存在特征频率5 Hz 的谱线,在其他频率处的谱线也大量减少。
设定萤火虫种群规模为50,最大迭代次数为200,荧光素挥发因子为0.4,适应度提取比例为0.6,邻域变化率为0.08,移动步长为0.03,邻域阀值为5,荧光素浓度为-10.81。经过53次迭代,GSO算法收敛。通过GSO 算法得到a,b的最优解,结果为a为2.904,b为0.363 1。如图5为GSO 算法优化系统输出特征图。从图5(a)可以看出系统输出在时域上呈现较明显的周期性,在图5(b)上可以观察出存在特征频率5 Hz 的谱线,其他噪声谱线基本消失。此时,系统的输出信噪比为-8.921 2 dB,相比传统方法增大了17.5%。该值计算方式为:(GSO算法输出的系统信噪比-传统方法输出的系统信噪比)/传统方法输出的系统信噪比。从图中也可观察到5 Hz 的谱线幅值相比传统方法增大许多。因此通过仿真验证,该方法可增强强噪声下的弱信号,同时也可提取出强噪声下的弱信号的特征频率。

图5 GSO算法优化系统输出特征图
为了体现GSO算法的优势,本文将其与遗传算法(GA)和粒子群算法(PSO)进行比较。遗传算法种群数也设置为50,最大迭代次数为200,交叉概率为0.6,变异概率为0.08。粒子群算法的种群数量为50,最大迭代次数为200。仿真效果比较见表1。
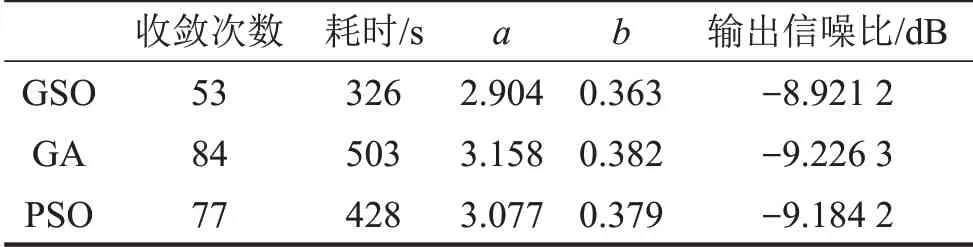
表1 仿真效果比较
从表1可以看出,GSO在收敛次数、耗时以及输出信噪比方面具有一定的优势,更适合实际应用。
4 试验验证
图6为型号SKF6016 的轴承滚动体故障试验台。本文设计的试验采集的信号为强噪声下的轴承故障声信号,数据采集设备型号INV3060V,采集软件为DASPV10,采样频率为10.24 kHz,采样时间为10 s,转速为56 r/min。该轴承的内径为80 mm,外径为125 mm,滚子直径为14 mm,滚子个数为14,接触角为0°,轴承宽度为22 mm。根据相关公式,计算该轴承内圈故障特征频率为7.5 Hz。
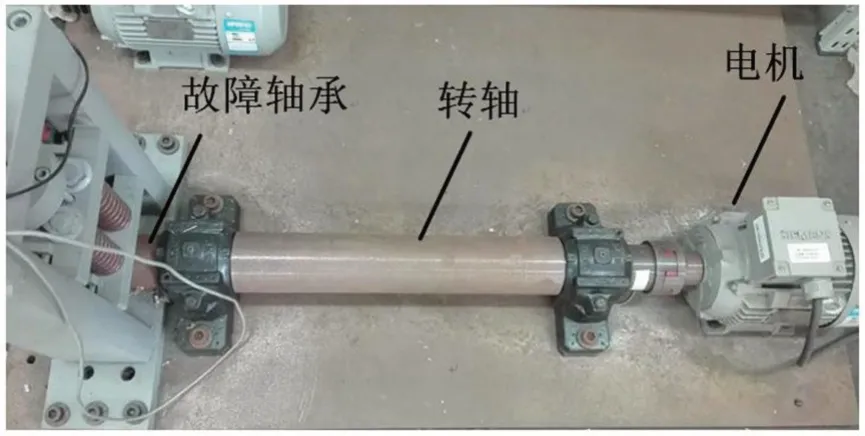
图6 型号SKF6016的轴承滚动体故障试验台
图7为强噪声下原信号特征图。从图7(a)无法观察出任何周期性波动,信号完全被噪声覆盖,从图7(b)中可以观察出很多频率谱线,但频率7.5 Hz 处无法观测。
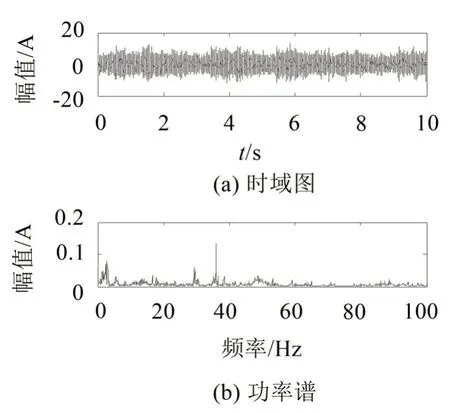
图7 强噪声下信号原始图
设置频率压缩率R为2 000,则二次采样频率fsr为5.12 Hz,特征频率压缩为f0r为0.003 75 Hz。初始化系统参数a为1,b为1,此时,系统的输出信噪比为-29.421 9 dB。如图8为系统参数a=1,b=1时系统输出特征图。从图8(a)中无法观察到周期性信号,在图8(b)上无法观察出存在特征频率7.5 Hz的谱线。
采用传统调节方法处理该试验信号,本文固定a为1,改变b。固定a为1,设定b的范围为[0.15]。改变b,最后得b为0.152 7 时,输出信噪比最大为-6.64 dB。如图9为传统方法调节系统输出特征图。
从图9(a)中可以观察到存在较弱的周期性信号,在图9(b)上只能观察出在频率为7.5 Hz 处存在微弱的谱线,其他噪声谱线有了一定的减少。
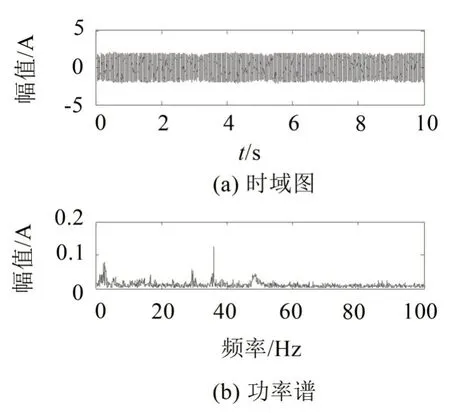
图8 系统参数a=1,b=1时系统输出特征图

图9 传统方法调节系统输出特征图
设定GSO参数与上述仿真实验一样,荧光素浓度为-6.64。经过91次迭代,GSO算法收敛,优化结果为a=4.192,b=0.262。如图10为GSO 算法优化系统输出特征图。从图10(a)可以看出系统输出在时域上呈现较明显的周期性,在图10(b)上可以观察出存在特征频率7.5 Hz 的谱线以及微弱的2 倍频15 Hz 的谱线,其他噪声谱线基本消失。此时,系统的输出信噪比为-5.917 7 dB,相比传统方法增大了10.88%。

图10 GSO算法优化系统输出特征图
从图中也可观察到5 Hz 的谱线幅值相比传统方法增大许多。因此通过试验验证,该方法可增强强噪声下的弱信号,同时也可提取出强噪声下的弱信号的特征频率。
设定遗传算法参数、粒子群算法参数与上述仿真实验一样,试验效果见表2。从表2可以看出,GSO 在收敛次数、耗时以及输出信噪比方面具有一定的优势,更适合实际应用。
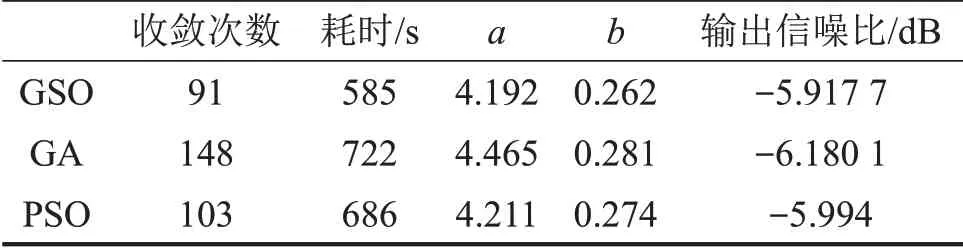
表2 试验效果比较
5 结语
本文采用的萤火虫优化算法具有可对种群自动划分、处理多极值的能力,同时具有较高的通用性与多样性的优点,还提出了利用GSO算法优化双稳随机共振系统参数。结果表明:通过仿真验证,基于GSO算法输出信噪比相比传统方法增大17.5%。通过试验验证,基于GSO算法的输出信噪比相比传统方法增10.88%。因此该方法对强噪声下车辆滚动轴承故障微弱信号的提取具有一定的实际应用价值。
猜你喜欢
中国科技财富(2022年8期)2022-12-18
物理学报(2022年10期)2022-06-04
现代仪器与医疗(2022年1期)2022-04-19
天津诗人(2021年1期)2021-11-12
物理实验(2020年12期)2021-01-06
北京航空航天大学学报(2019年9期)2019-10-26
小天使·一年级语数英综合(2018年7期)2018-09-12
雷达学报(2017年3期)2018-01-19
小天使·一年级语数英综合(2017年6期)2017-06-07
为了孩子(孕0~3岁)(2016年1期)2016-01-16