基于声场HBT干涉的空间定位方法研究
2019-06-25 09:18刘梦然
压电与声光 2019年3期
聂 磊,邹 静,刘梦然,冯 胜
(湖北工业大学 湖北省现代制造质量工程重点实验室,湖北 武汉 430068)
0 引言
声音是信息传播的重要载体,基于传感器阵列的声源定位是一个重要的研究方向,在自动驾驶、无人机、潜艇探测等方面具有广泛的应用前景,在国防安全和工业自动化生产中的重要性日益提升。特别在水下定位中,声波几乎是目前唯一可以实用化的远距离传播的能量形式,具有重要的研究意义。应用麦克风阵列进行定位是现在声源定位的一种重要方法,基本原理是利用麦克风阵列采集声音信号,再将声源与阵列结构之间的关系进行分析,从而得到声源的位置信息[1-2]。
目前主要使用的声源被动定位方法可分为三类:基于到达时延差定位法、基于高分辨率谱估计的定位法和基于波束形成的定位法[3-4]。基于到达时延差定位法的计算量小、易实现,是目前最常用的定位方法之一,该方法利用声源到达麦克风不同位置的时间差来估计声源的位置,但对于远程和低信噪比下的定位精度不高[5-6]。基于高分辨率谱估计的定位法主要来源于现代高分辨率谱估计技术,但由于声音信号短时和平稳的特性,使得此法难以满足高分辨率对于估计精度的需求,实用性不强[7]。基于波束形成的定位方法将各阵元采集的信号进行加权求和和波束形成,通过引导波束来实现定位,但这种方法计算量大且不利于实时定位。虽然上述方法可以满足基本定位需求,但仍需改进。
本文提出了一种基于声场Hanbury Brown-Twiss(HBT)干涉的空间定位方法,此法可以实现在低信噪比情况下低频信号的远距离准确定位,对传感器位置要求不高。通过仿真和空气实验验证了此法的正确性,为声传播介质(空气、水等)内远距离目标定位的研究提供了新的思路。
1 HBT干涉定位原理实验
光的HBT干涉实验描述了光场强度之间的关联,当两路光信号时间延迟为0时,关联函数为最大值,随着时间延迟的增加,关联函数逐渐下降,并最终趋于一个常数[8]。本文将光学中的HBT干涉理论运用到声场的HBT干涉中,传感器接收的信号包括声源的声音信号和环境背景的干扰噪声,由于声源信号具有内禀相干性,会通过HBT干涉表现出来,而噪声信号无内禀相干性。两个传感器接收到的声源信号的乘积(即HBT关联函数)会随着相位差的变换而变化,当相位差为0°时,关联函数为最大值,相关性最大;相位差变大时,关联函数逐渐下降。因此,当相位差为0°时,关联函数最大值处就是声源的位置所在。
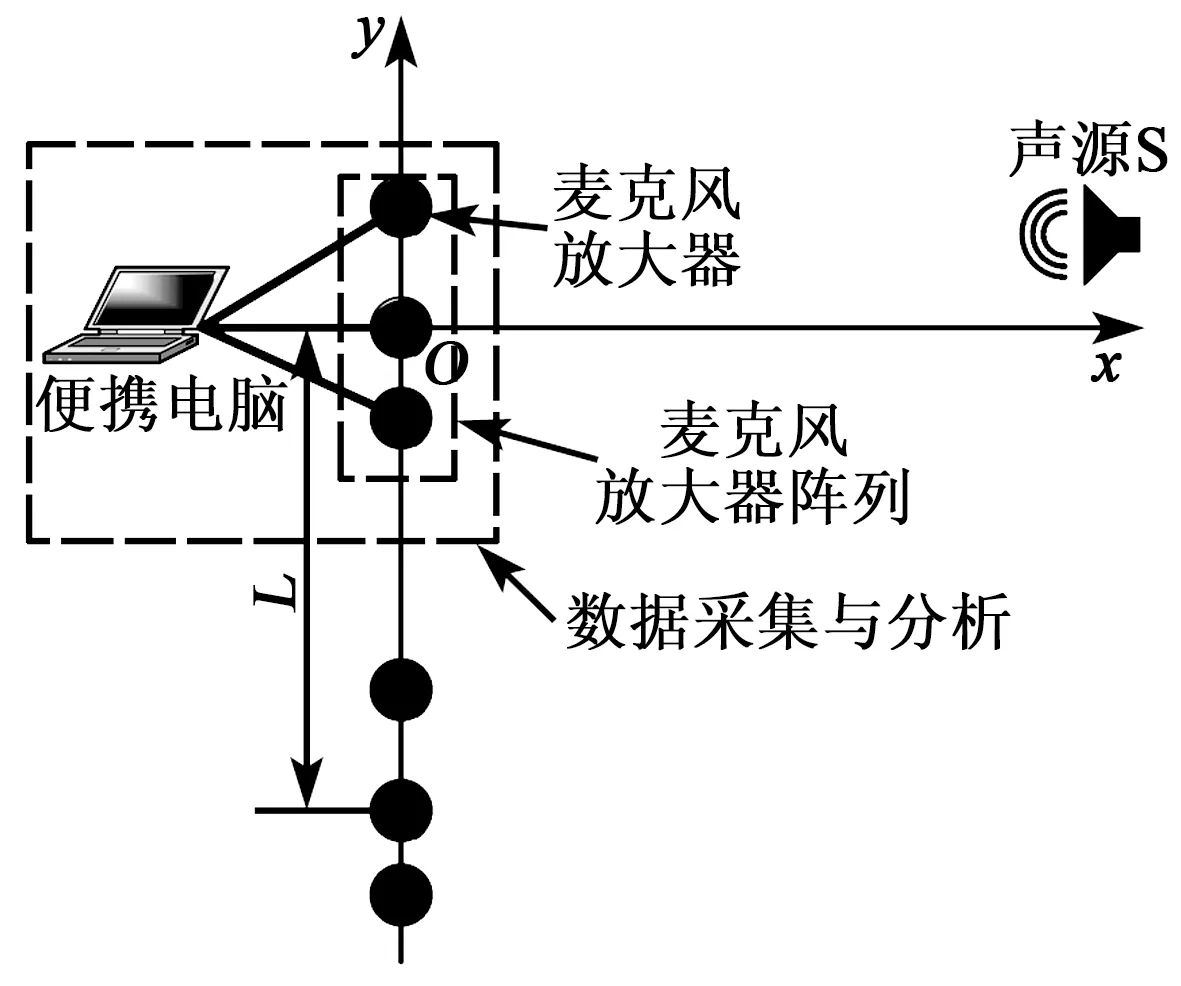
在此以简单的三角阵为例建立模型来对声场的HBT干涉进行说明。如图1所示,传感器阵列由阵元M1、M2和M3组成,S表示声源,以其中一个传感器M2为原点建立直角坐标系,传感器阵列的坐标为Mj(xj,yj)(j=1,2,3)。假设有一声源,其坐标为(X,Y),发射信号,并将信号传送到传感器阵列中。图1中长方形区域为声源可能出现区域,并以间距L向该区域进行扫描,计算对应位置HBT关联函数,最终确定声源的位置。
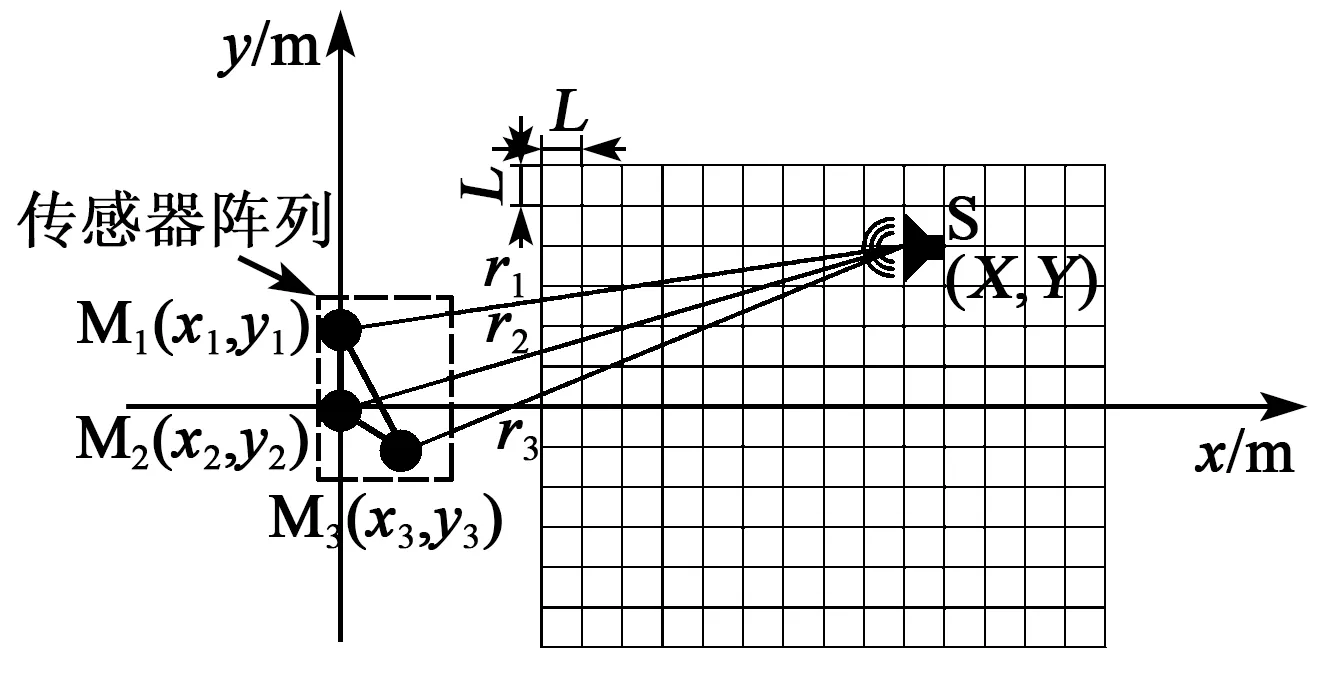
图1 HBT干涉定位示意图
传感器接收的声源信号Pi为
(i=1,2,3)
(1)
式中:Ni为环境噪声;A为声源发射的振幅;ri为传感器Mj与声源之间的距离;v为声速;φi为传感器网接收到的声源信号初相位。将光场HBT干涉原理运用在声场中,声源发出的声信号传递到传感器阵列中,将阵列内的传感器接收的信号两两进行HBT关联函数计算。
此时求得归一化关联函数为
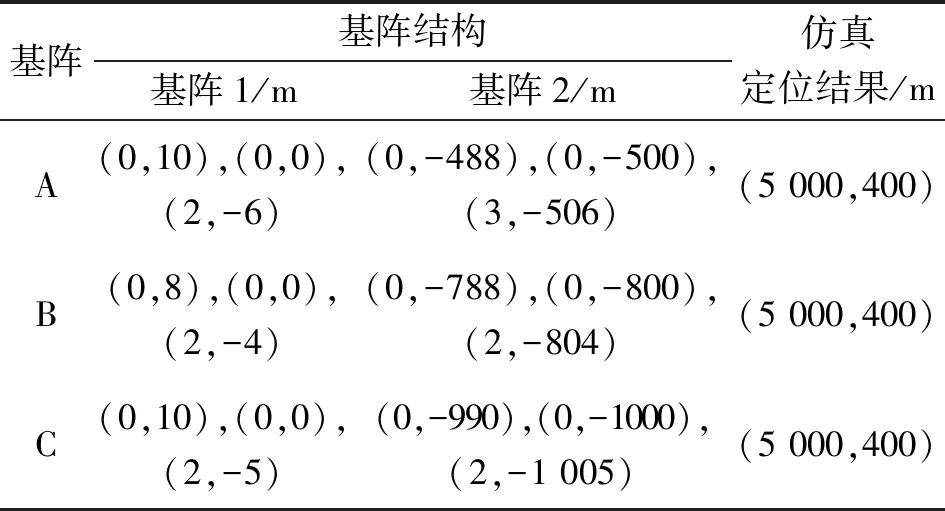
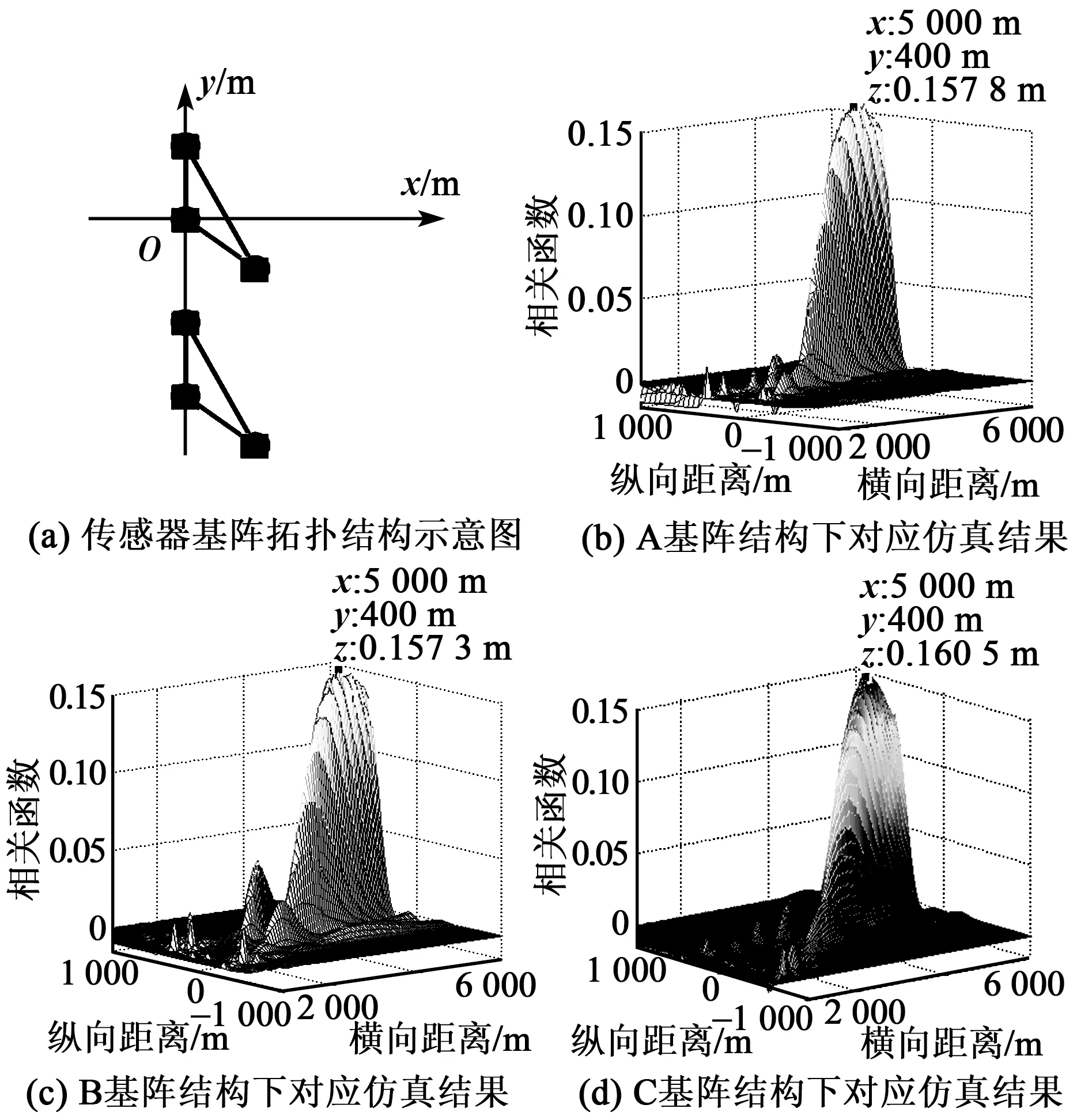
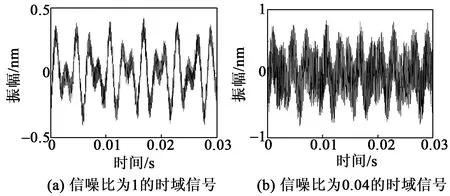
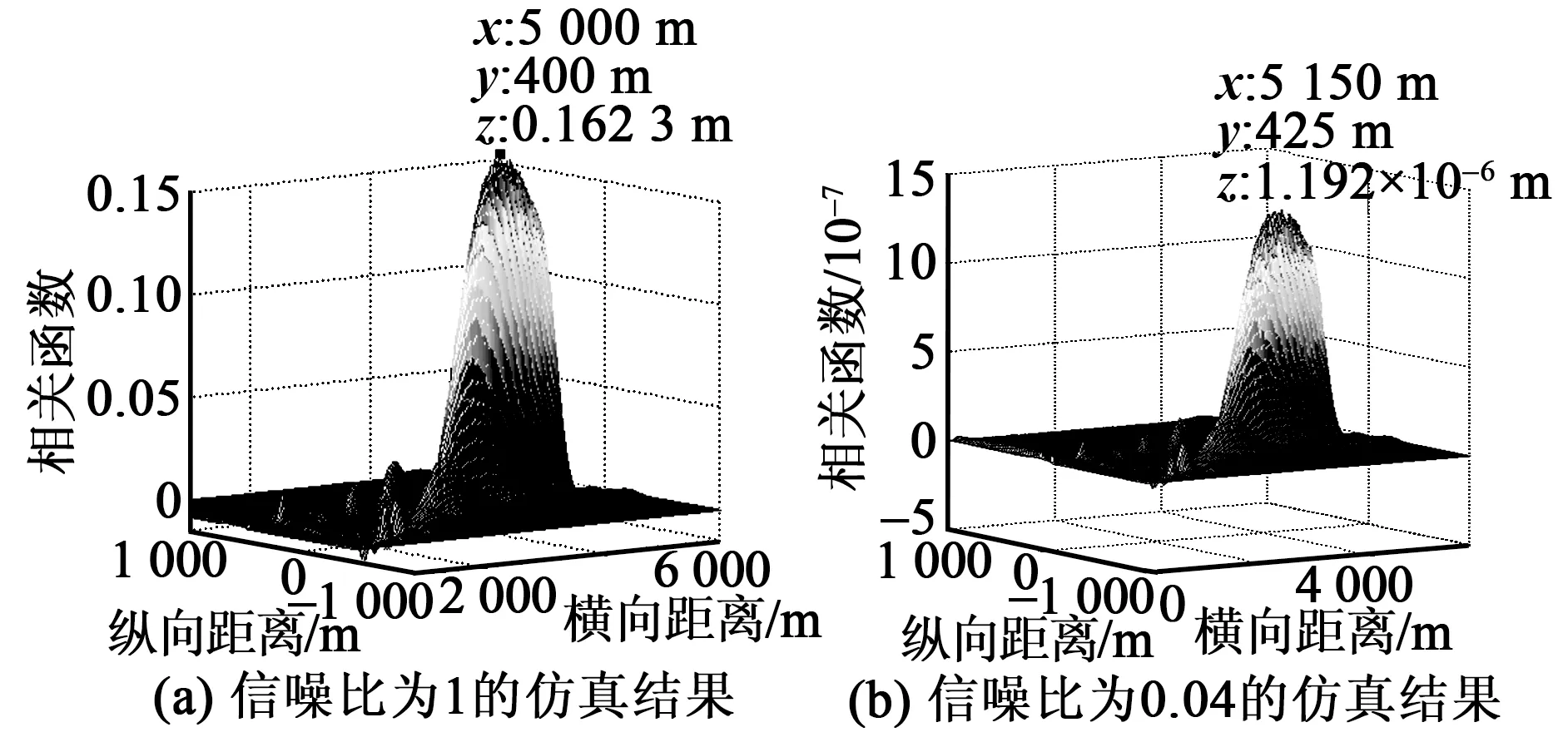
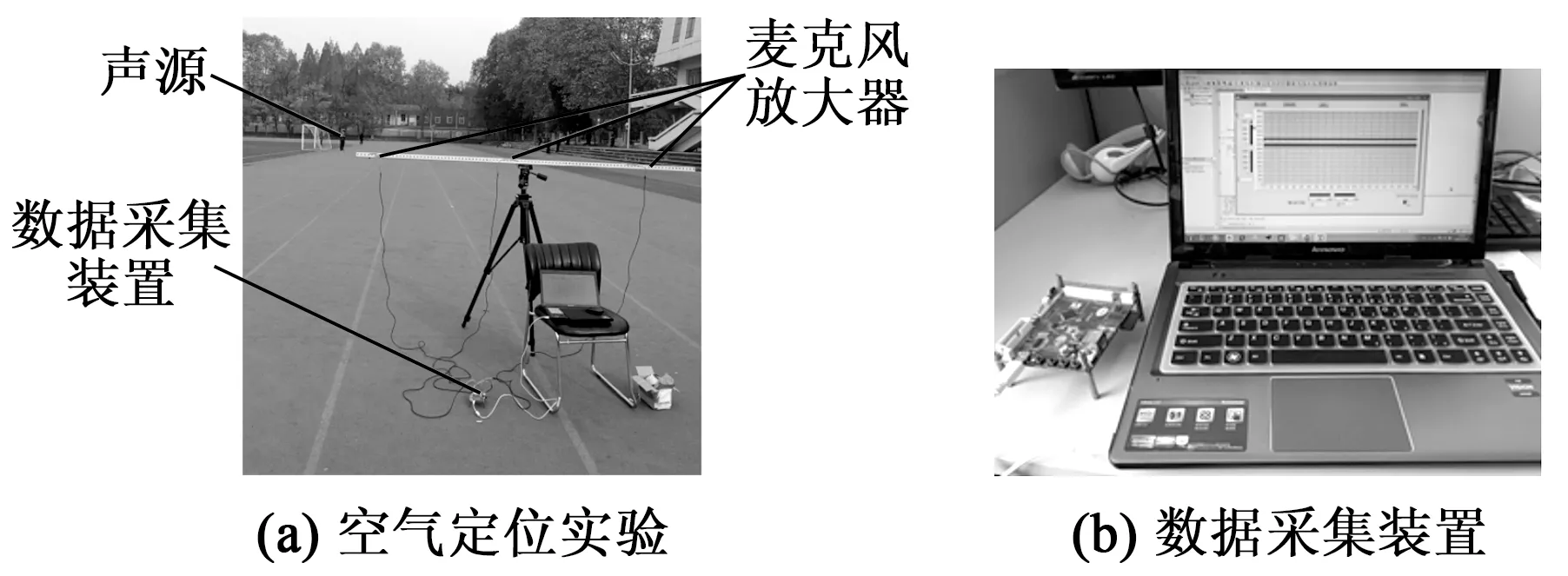
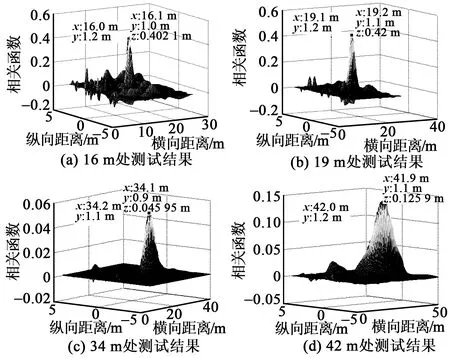
(j=1,2,3;k=1,2,3;j (2) 式中ΔT为声源到传感器阵列的时延。 最终求得归一化HBT关联函数的值为 C=C(ΔT12)×C(ΔT13)×C(ΔT23) (3) 根据以上所建模型对实际环境下的声源定位进行模拟仿真,坐标如图1所示,对距离为5 000 m的目标进行仿真定位。根据实际环境因素,假设传感器接收到的环境噪声为白噪声,且为理想的各向同性均匀的噪声场。由于高频率声波在远距离传播时衰减较快,而低频率声波衰减较慢,因此,低频率的声波是远距离定位时传感器接收到信号的主要频率成分,故在此假设传感器接收到的声源信号的频率成分为500 Hz和315 Hz,其预设声源的位置坐标为(5 000,400),在这种假设前提下利用Matlab进行空间定位仿真分析。 由于声源的定位距离远,阵内间距小,使得声源与传感器阵元之间的交汇角很小,当其对应的3个关联函数相乘时,定位分辨率降低,仅能确定声源的方向,而无法确定声源的具体位置。因此,要确定一个声源的位置,必须有两个以上的阵列,从而形成多条相交的直线,交点即为声源位置所在。传感器基阵位置坐标及其对应仿真定位结果如表1所示,表中A、B和C表示三角形拓扑结构间距为500 m、800 m和1 000 m时基阵的坐标位置及仿真结构。图2(a)为两个三角形拓扑结构图。图2(b)~(d)为不同基阵坐标下对应的仿真结果。 表1 基阵坐标位置及仿真结果 图2 传感器拓扑结构及其仿真结果 由图2可见,基阵的结构不同,每个小阵的间距也均不相同。采用A、B、C基阵结构仿真均可以准确地找到声源(5 000,400)的位置,与实际声源位置完全吻合。由仿真结果可看出,改变基阵的阵内间距和阵间间距均可以准确地找到声源的位置,因此,此法对传感器位置要求不高,不需要固定间距。 下面分别对信噪比为1和0.04的情况下进行仿真分析。图3是信噪比为1和0.04时传感器阵元输出时域模拟信号。图4是信噪比为1和0.04时空间定位的模拟仿真结果。由图3、4可以看出,在信噪比为1时可以准确地找到声源的位置(5 000,400),与实际声源位置吻合;在信噪比为0.04的情况下,通过仿真仍可以找到声源的位置为(5 150,425),虽然存在误差,但与实际声源位置(5 000,400)基本吻合。 图3 传感器阵元输出时域模拟信号 图4 空间定位的仿真结果 由以上仿真分析可知,利用声场HBT干涉原理使用6个传感器(两个基阵)可以精确地对声源进行定位。这种定位方法对阵内间距和阵间间距要求不高,且在信噪比为0.04时仍能较准确地找到声源的位置。由此,采用声场HBT干涉原理进行空间定位,可以实现远距离、低信噪比下的精确定位。 根据HBT干涉目标定位原理和仿真进行空气中目标定位实验,进一步验证了HBT干涉空间定位原理的正确性。图5为空气实验方案图。建立如图1所示的坐标系,声源S为远处连续不断发出的声音信号,麦克风放大器接收声音信号,3个在同一直线位置放置的麦克风放大器组成一个阵列,将两个相距为L的阵列利用STM32最小系统进行数据同时采集[9],最后利用Matlab进行数据分析,找到声源的位置。 图5 实验方案 空气定位实验如图6(a)所示,其数据采集装置如图6(b)所示。利用麦克风放大器模块对远处声源级为82 dB连续播放的声音信号进行数据采集,在采样率为100 000的前提下,同时采集6组数据,每组采样2 000个点。将采集到的数据导入Matlab中进行HBT关联函数计算,最终得到声源的位置。 图6 空气中目标定位实验与数据采集 在此分别对坐标为(16.0,1.2)、(19.1,1.2)、(34.2,1.1)和(42.0,1.2)处的声源进行测试,实验结果如图7所示,其结果分别为(16.1,1.1)、(19.2,1.1)、(34.1,0.9)和(41.9,1.1)。考虑到麦克风安装精度、周围环境噪声、风速和声音在空气中衰减较快(在42 m处声源衰减到53 dB)等的影响,最终实验结果与实际声源位置基本吻合,在42 m位置处可以准确地找到声源的位置,其定位误差为0.1 m。 图7 空气中声源定位测试结果 本文提出了一种基于声场HBT干涉空间目标定位方法,通过计算任意两个阵元输出信号的HBT关联函数来确定声源的位置。在不同基阵结构和信噪比下对声源定位进行模拟仿真。仿真结果表明,2个传感器阵列,6个传感器可以准确地找到5 000 m处声源的位置。在信噪比为1和0.04时均可以较准确地找到声源的位置。最后通过空气实验对声源级为85 dB的声源进行不同距离的定位实验,在42 m处可以准确地找到声源的位置,误差为0.1 m。2 HBT干涉定位仿真
2.1 传感器拓扑结构仿真分析
2.2 不同信噪比下的仿真结果
3 空气中定位实验
4 结束语
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
海洋信息技术与应用(2020年1期)2020-06-11
铁道通信信号(2020年12期)2020-03-29
电子制作(2019年23期)2019-02-23
家庭影院技术(2018年11期)2019-01-21
水下无人系统学报(2018年5期)2018-11-09
弹道学报(2016年4期)2016-12-14
噪声与振动控制(2016年5期)2016-11-09
西北工业大学学报(2015年3期)2015-12-14
舰船电子工程(2015年4期)2015-03-15