
轮式移动机器人文献综述
2019-06-26 01:31王晓芸
石家庄铁路职业技术学院学报 2019年2期
王晓芸 崔 培 陈 晓
(石家庄铁路职业技术学院 河北石家庄 050041))
1 引言
随着社会发展和科技进步,机器人在当前的工业生产和人们生活中的应用越来越多。轮式移动机器人由于其具有自重轻、承载大、机构简单、驱动和控制相对方便、行走速度快、机动灵活、工作效率高等优点,而被广泛应用于生产生活中的各个领域。轮式移动机器人不同的车轮数目一般采用不同的控制方式,因此,轮式移动机器人按照车轮数目可分为单轮滚动机器人、双轮移动机器人、四轮移动机器人、多轮(复六轮和八轮)移动机器人。对这些机器人的研究现状进行了分析,并对轮式移动机器人的性能、运动学分析方法、动力学建模方法进行了比较和总结。
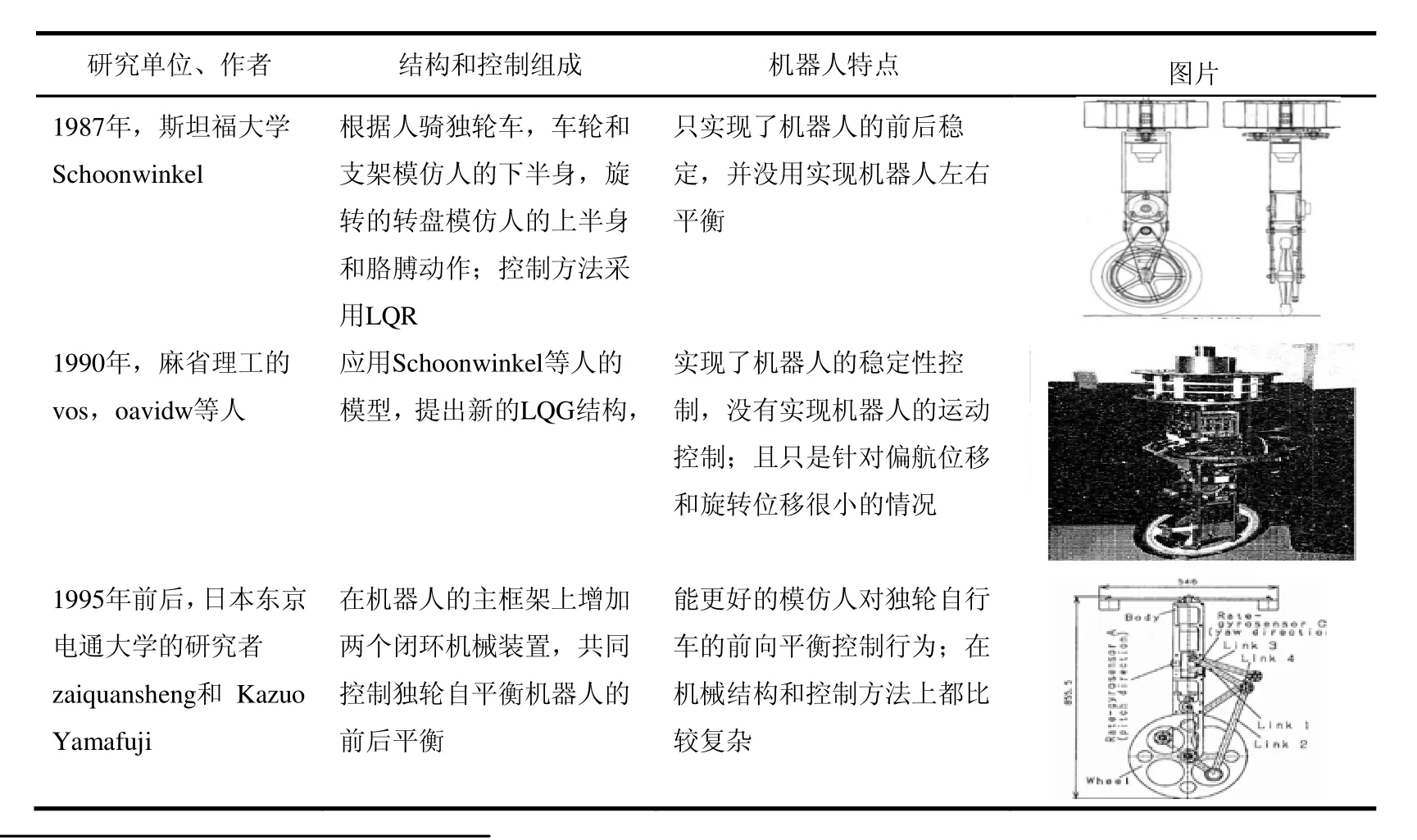
表1 独轮机器人研究现状
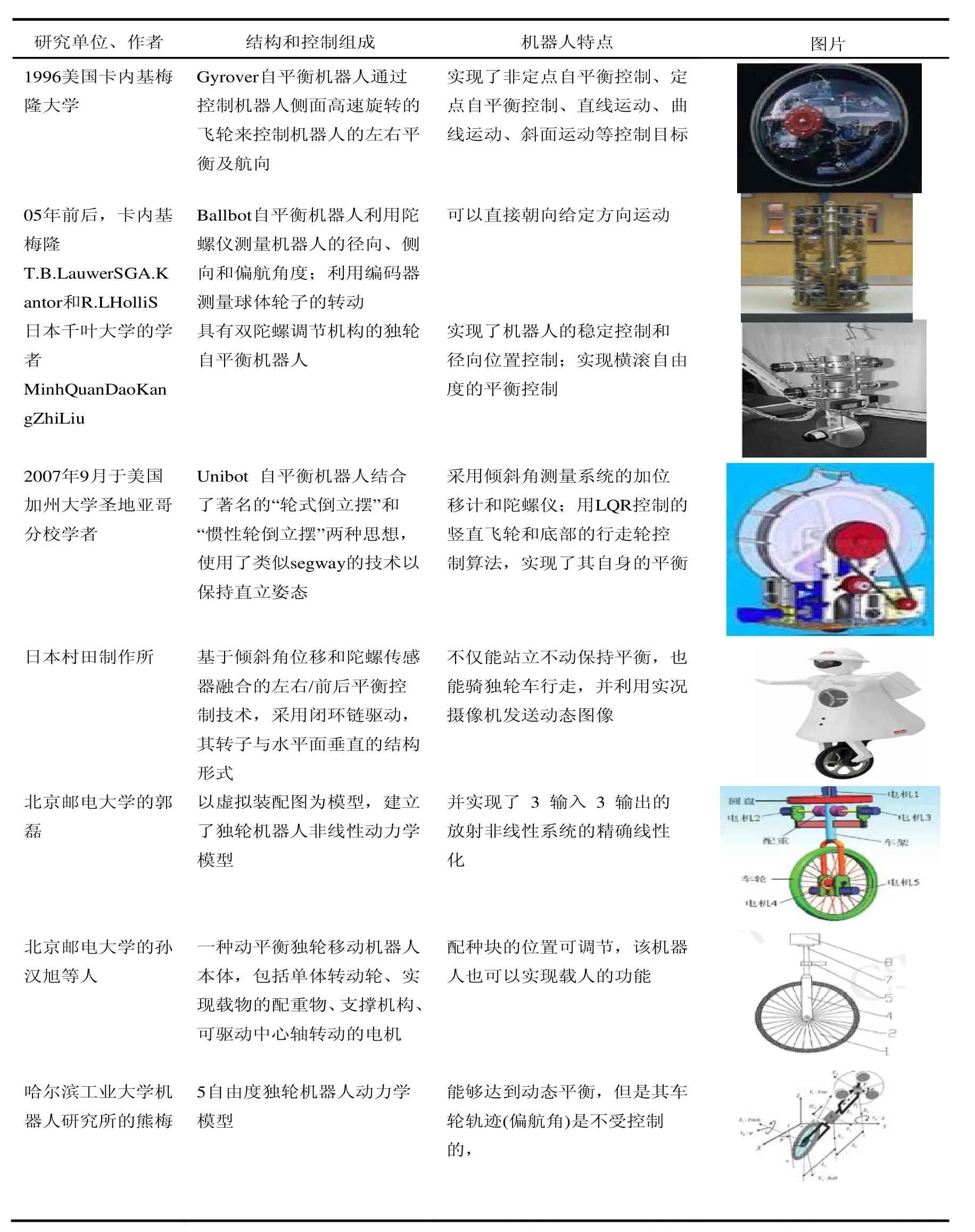
续表1
2 轮式移动机器人研究现状
独轮车机器人一个多变量、 强耦合、 非线性的复杂动力学系统,其产生稳定运动所需解决的动态平衡问题,是一个很好的控制理论和动力学研究模型。双轮自平衡机器人需要在没有外力作用下能够仅靠自身从倒地状态恢复到竖直平衡状态,即双轮机器人自平衡。多轮移动机器人独立驱动轮式移动机器人每只车轮都是单独的动力源并且相互独立,对车轮的输出转矩直接控制,具有很强的受控性。表1、表2、表3分别是是独轮滚动机器人、双轮自平衡机器人及多轮机器人的研究现状。
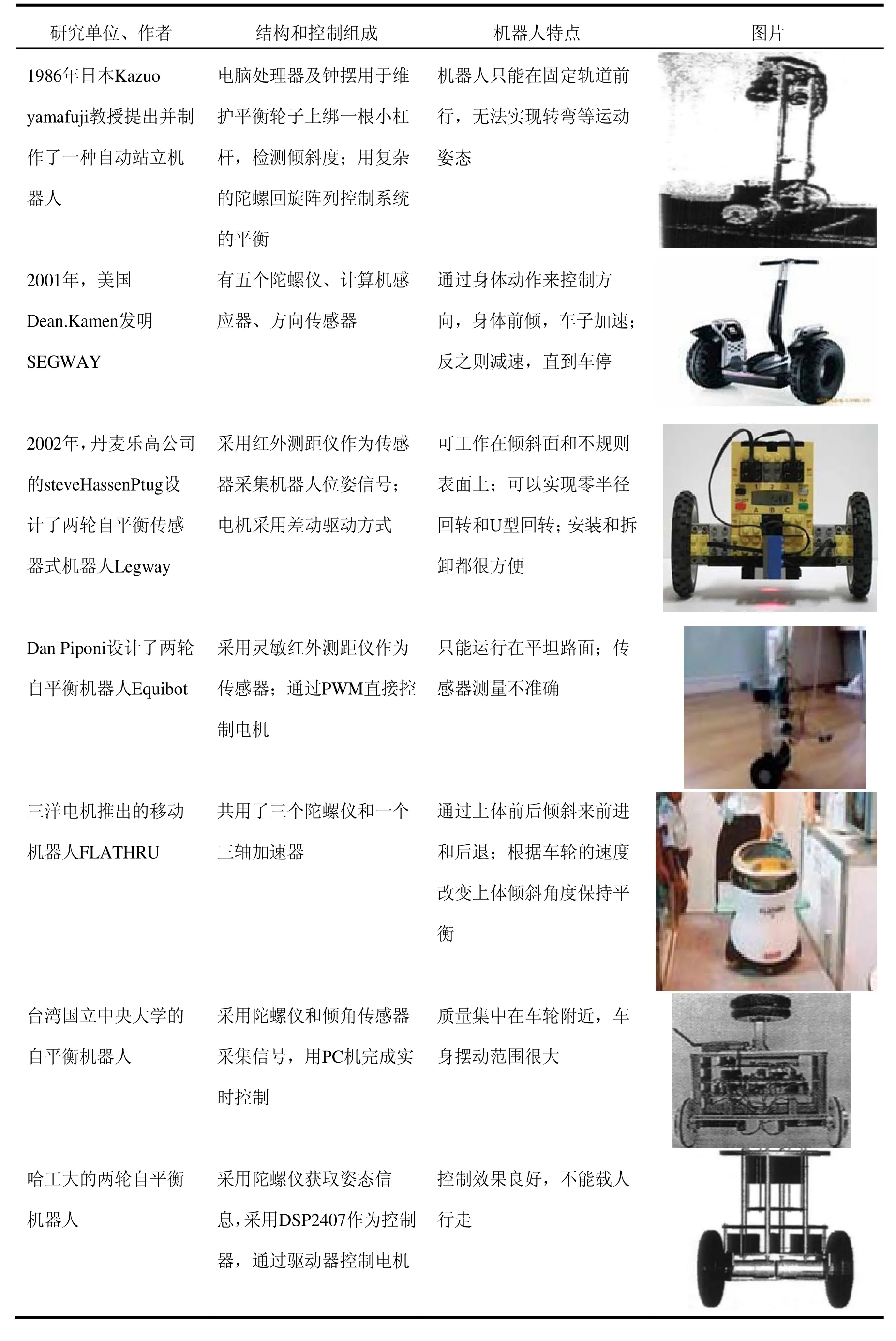
表2 双轮机器人研究现状
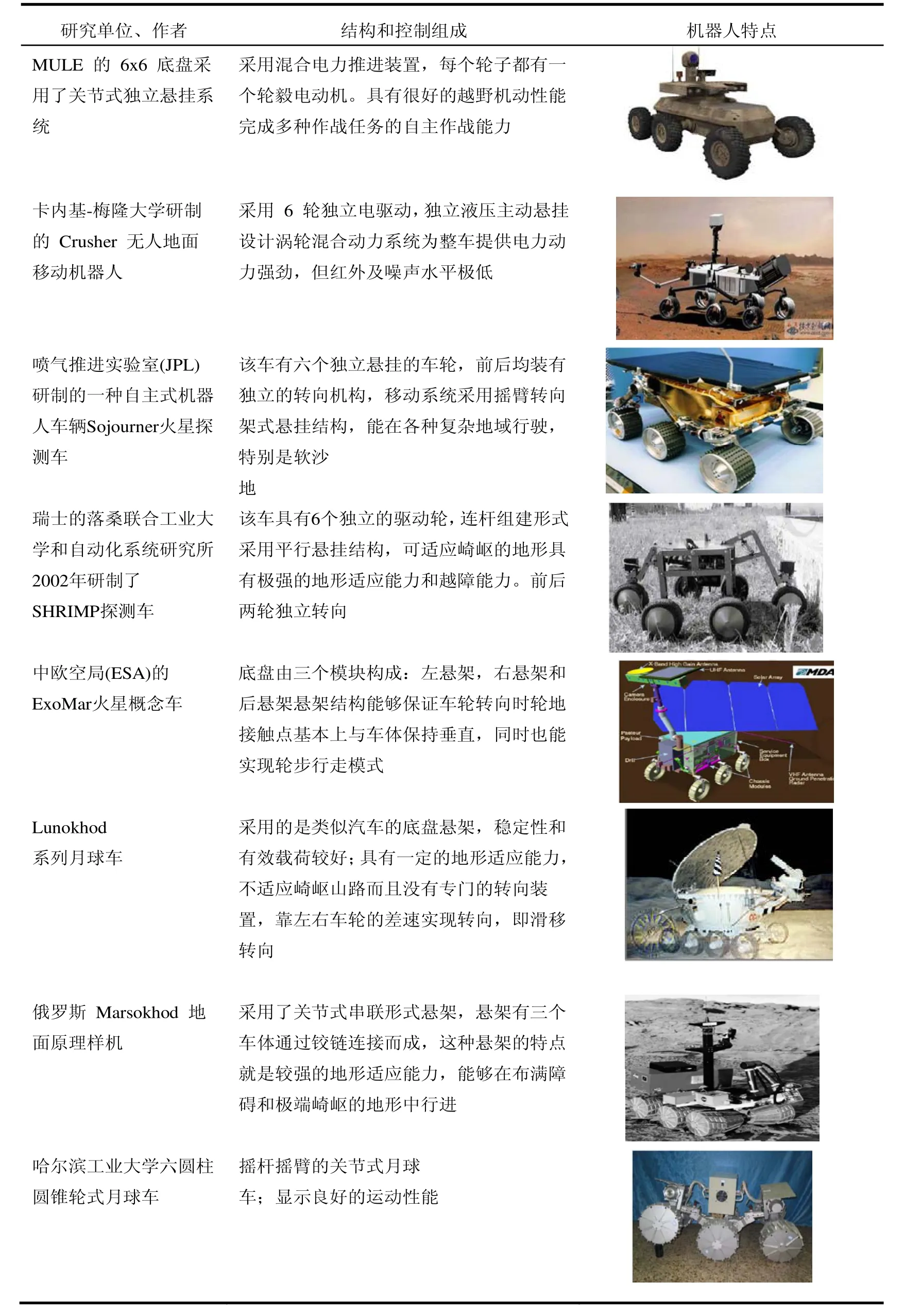
表3 多轮机器人研究现状
3 轮式移动机器人的运动学和动力学特性分析方法
轮式机器人的运动学分析方法主要有矢量法(速度合成法)、坐标变换法(D-H)、几何法和轮心建模法等。矢量法是通过描述多刚体运动时不同位置以及不同刚体间的速度来建立动力学方程式,其矢量方程易列出,物理意义明确,但求解繁琐,多用于平面移动机器人的建模或者并联机构建模。坐标变换法是对车体建立关节坐标系,利用D-H法进行坐标变换,再对关系式求导,得出轮子相对车体的速度雅可比方程式,该方法较为繁琐,需进行偏导运算且速度雅可比矩阵元素表述复杂,物理意义不明确,用于不规则地形下轮式机器人的运动学建模。几何法是根据刚体运动时不同刚体、杆件之间的几何约束,建立运动学方程式,该方法比较直观、易懂,用于模型简单场合。轮心建模法通过分析多刚体的运动以及不规则地面上轮式移动机构转动角速度特性建立运动学方程式,该方法可准确、快速建立运动学模型且具有明确物理意义,用于不规则地形下轮式或轮腿复合式机器人的运动学模型。
轮式机器人的动力学分析方法主要有拉格朗日方程、牛顿-欧拉方程、凯恩方程法和虚功原理等。拉格朗日方程只需计算系统的动势能,动力学方程式简单、整齐,但需计算动能的导数和偏导数,部件增加时,其计算量呈几何级数增加,因此适用于较简单的动力学方程,以避免方程中出现内力项。牛顿-欧拉方程应用质心动量矩定理列出隔离体的动力学方程,内力项物理意义明确,可表达系统完整受力关系,但其方程数量大,计算效率低,多用于实时控制。凯恩方程以矢量运算为基础,无需计算各部件动势能的导数和偏导数,计算量小,可推导相应的递推公式,但只适用于串联机构。虚功原理依据系统外力和惯性力因为位移而做的虚功之和,动力学方程简洁,能表示出各构件的耦合性,但不宜求解复杂系统的虚功,适用于构件较少的串并联系统。
4 结论
轮式移动机器人的研究主要有机构、动力和运动控制三个方面的内容。轮式移动机器人由于车轮布置形式以及车身结构的不同,对地形的适应能力以及动力学特性也有着很大的不同。因此,在设计轮式移动机器人时,要综合考虑考虑工作环境、控制精度、灵活性、运动学和动力学特性。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
交通科技与管理(2022年9期)2022-05-24
军民两用技术与产品(2021年10期)2021-03-16
制造技术与机床(2018年8期)2018-10-09
中国军转民(2018年1期)2018-06-08
北京航空航天大学学报(2017年1期)2017-11-24
制造技术与机床(2017年3期)2017-06-23
制造技术与机床(2017年3期)2017-06-23
筑路机械与施工机械化(2014年7期)2014-03-01
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
