
论盾构施工穿越既有地铁运营线路的控制措施
2019-06-26 01:31雷杨
石家庄铁路职业技术学院学报 2019年2期
雷 杨
(中铁十八局第五工程有限公司 天津 300000)
1 前言
随着城市地下轨道交通建设不断发展和延伸,在城市中心及城区既有地铁线路越来越密集,在地铁施工中,不可避免的遇到盾构机穿越既有地铁线路问题,盾构机掘进过程中,开挖区域及周边土体发生变形,容易引起临近建(构)筑物的变形和破坏。在上跨临近的地铁线路结构进行全过程监测,保证既有线路的正常安全运营是目的之一。充分挖掘盾构机掘进技术控制,达到开挖面土体稳定的前提下保证既有线路的安全稳定是重中之重。因此研究特殊困难条件下的盾构穿越施工,对于目前城市轨道交通工程施工具有一定的指导意义。
2 工程概况
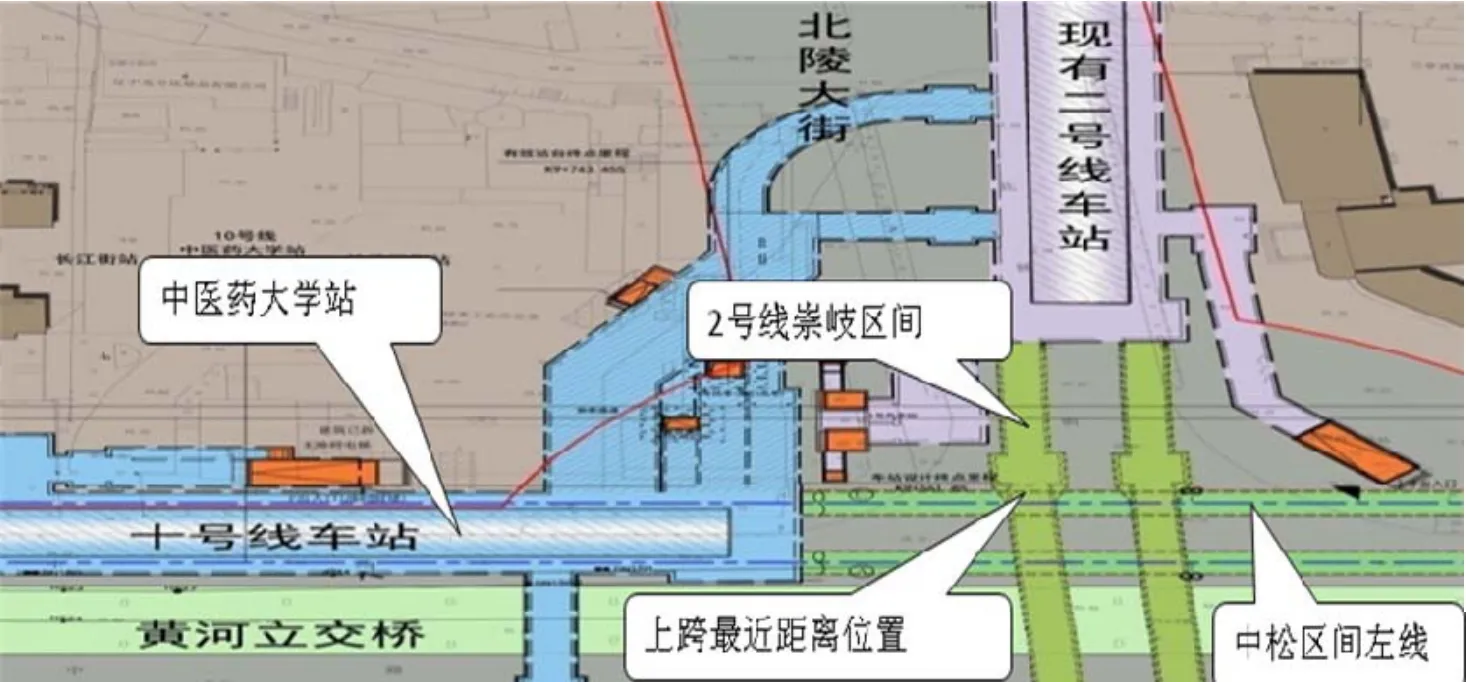
图1 工程概况
中医药大学站~松花江街站区间西起中医药大学站,沿崇山东路向东,线路出中医药大学站后沿崇山东路东行,上跨2号线崇岐区间,侧穿崇山路高架桥、东一环高架桥,下穿北塔桥桥桩后至松花江街站。设计右线全长1234.733;左线全长1235.045 m。区间隧道为标准单洞单线圆形断面,盾构法施工,线间距12~15 m,覆土厚度9.8~17.8m。中医药大学站~松花江街站区间自中医药大学站始发,左线始发约23 m左右开始上跨2号线崇岐区间右线人防段隧道,最小间距176 mm。始发约38 m开始上跨2号线崇岐区间左线人防段隧道,最小间距580mm。
既有崇岐区间为标准单洞单线马蹄形断面,采用矿山法施工,复合式衬砌,10号线区间上跨既有2号线区间标准段及人防段;既有2号线区间标准段二衬厚度350mm,初支250mm,人防段二衬500 mm,初支300mm;既有区间人防段与标准段间设变形缝,变形缝距离区间左线水平净距约0.33m。
3 盾构机选型及参数
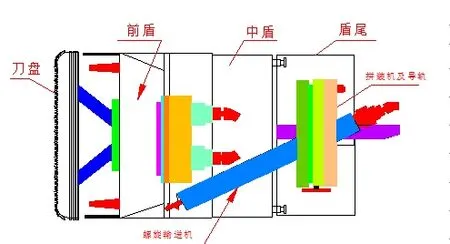
图2 盾构主机示意图
区间盾构机选用日本JTSC(石川岛)土压平衡盾构机,盾构机盾体长度为9.98m(含刀盘长度)包括后配套总长65m,分为盾构机主机和后配套设备两大部分,后配套设备分别安装在6节后续台车上;刀盘开口率65 %,盾尾间隙25mm,最大掘进速度为90mm/min,最大推力为40000 kN,额定扭矩为5236 kNm,脱困扭矩 6200 kNm。
4 盾构机穿越过程的渣土改良措施
穿越段范围内主要地质为<3-3>中粗砂,<3-4>砾砂,为避免掘进时出现超挖、喷涌等不良工况,通过盾构机渣土改良系统在仓隔板和刀盘注入泡沫溶液,避免刀具出现非正常磨损。在泡沫发生器工作的过程中,可以设定泡沫剂与水混合的比例,在正常掘进状态下,通常取值为3%。另外,当泡沫剂改良效果达不到理想状态时,可以通过膨润土注入系统往刀盘前注入膨润土泥浆,通过注入膨润土泥浆和泡沫的混合材料进行渣土改良,确保出土顺畅,渣土和易性较好。
5 穿越期间的盾构机姿态控制
5.1 姿态监控系统
盾构姿态监控可通过自动导向系统和人工测量复核进行盾构姿态监测。自动导向系统配置了导向、自动定位、掘进程序软件和显示器等,能够全天候在盾构机主控室动态显示盾构机当前位置与隧道设计轴线的偏差以及趋势。随着盾构推进导向系统后视基准点需要前移,必须通过人工测量来进行精确定位。
5.2 调整与控制
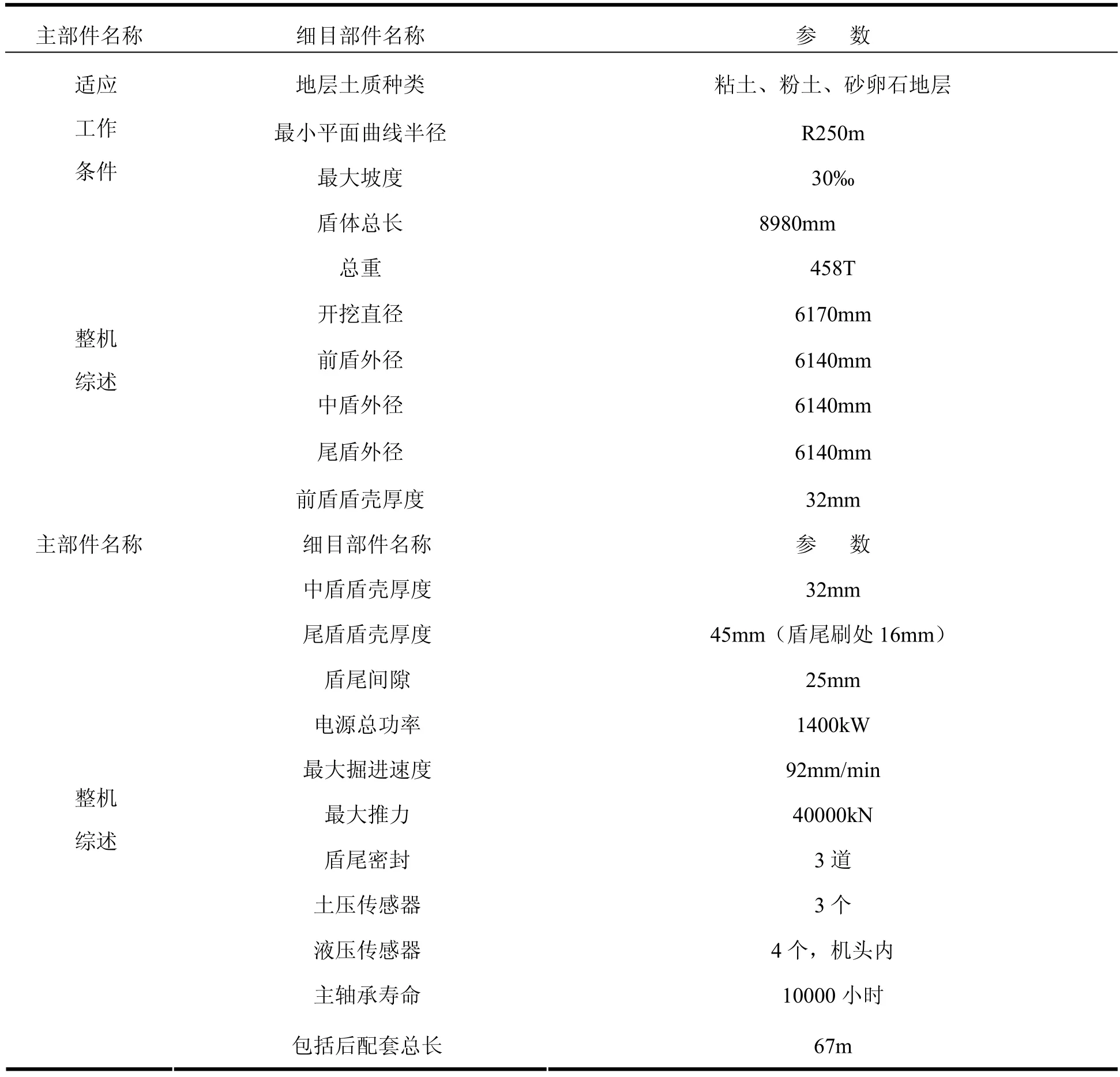
表1 盾构机选型及参数
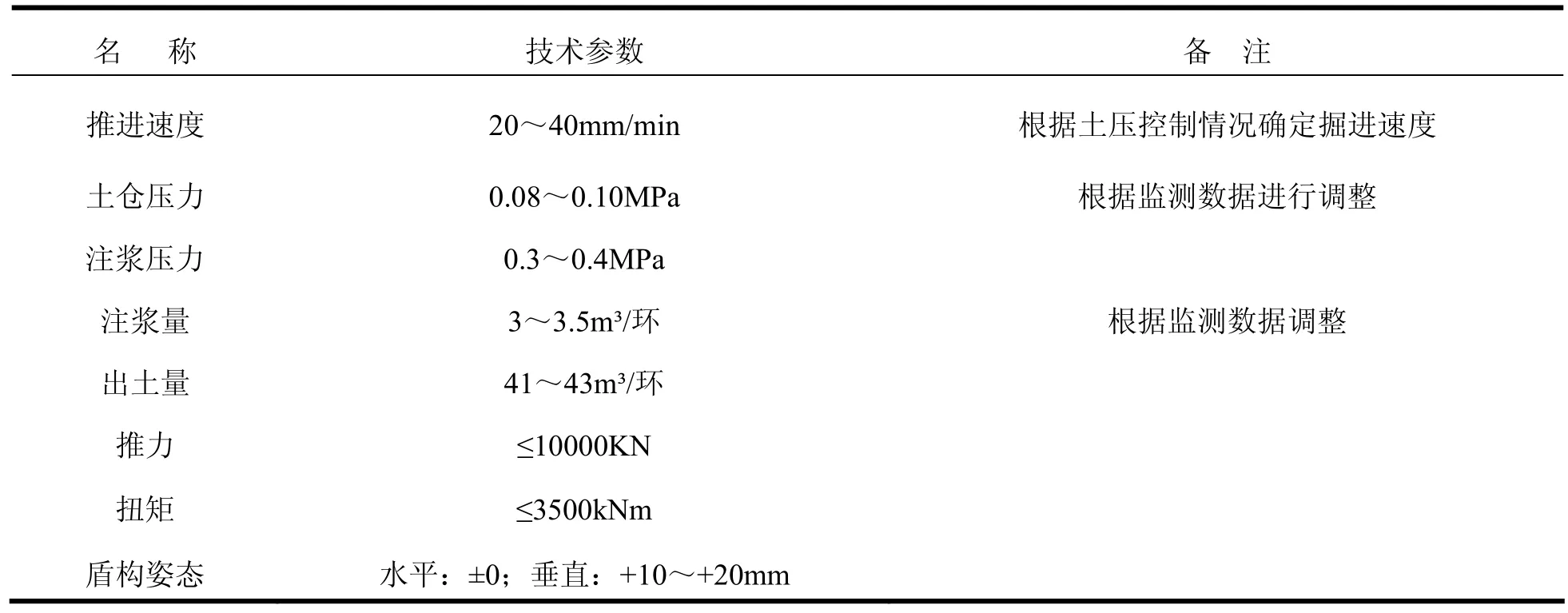
表2 实际穿越期间掘进技术参数汇总
盾构姿态调整与控制便可通过分区调整推进油缸压力实现盾构掘进方向调整与控制。
5.3 纠偏措施
(1)滚动纠偏
刀盘切削土体的扭矩主要是由盾构壳体与洞壁之间形成的摩擦力矩来平衡,当摩擦力矩无法平衡刀盘切削土体产生的扭矩时将引起盾构本体的滚动。盾构滚动偏差可通过转换刀盘旋转方向来实现。
(2)竖直方向纠偏
控制盾构机方向的主要因素是千斤顶的单侧推力,它与盾构机姿态变化量间的关系非常离散,需要靠人的经验来掌握。当盾构机出现下俯时,可加大下侧千斤顶的推力,当盾构机出现上仰时,可加大上侧千斤顶的推力来进行纠偏。同时还必须考虑到刀盘前面地质因素的影响综合来调节,从而到达一个比较理想的控制效果。在穿越期间,竖直控制在+10~+20mm之间。
(3)水平方向纠偏
与竖直方向纠偏的原理一样,左偏时应加大左侧千斤顶的推进压力,右偏时则应加大右侧千斤顶的推进压力,并兼顾地质因素。在穿越期间,水平控制在±0mm左右。
6 盾构机掘进参数控制措施
①停机检查、合理设置土压力值,防止超挖和欠挖
为确保上跨既有区间的稳定,在盾构机进入结构范围前10m,进行停机检查,确保盾构机各部件能够顺利运行并快速通过既有区间范围,找出上述参数之间的关联,科学合理地设置土压力值及相宜的推进速度等参数,防止超挖和欠挖。
②少纠偏,特别是大量值的纠偏
在盾构机穿越前,对控制网及井下、隧道内的测量控制点进行复测。在确认无误的情况下,盾构机根据测得的姿态,将轴线误差调整到小于10mm,以准确的姿态进入穿越基础的推进。推进过程中,每50cm测量一次盾构机的姿态偏差,操作人员根据偏差及时调整盾构机的推进方向,尽可能减少纠偏,特别是要杜绝大量值纠偏,从而保证盾构机平稳地穿越。
③同步注浆采用可硬性浆液
采用可硬性浆液进行同步注浆,浆液24小时强度达0.1MPa。通过同步注浆控制地层变形,及时稳定管片,改善管片受力条件,有利于推进方向的控制,确保结构在列车震动和7°地震下不液化。
④盾构穿越后的补压浆及必要的跟踪注浆
在盾构穿越后,对沉降点进行持续地观察,尤其是穿越后的一个月内。将根据土体重新固结引起的沉降量,在隧道内进行后期补压浆,必要时从地面钻孔进行跟踪注浆,以确保结构的安全稳固。
7 监控量测措施
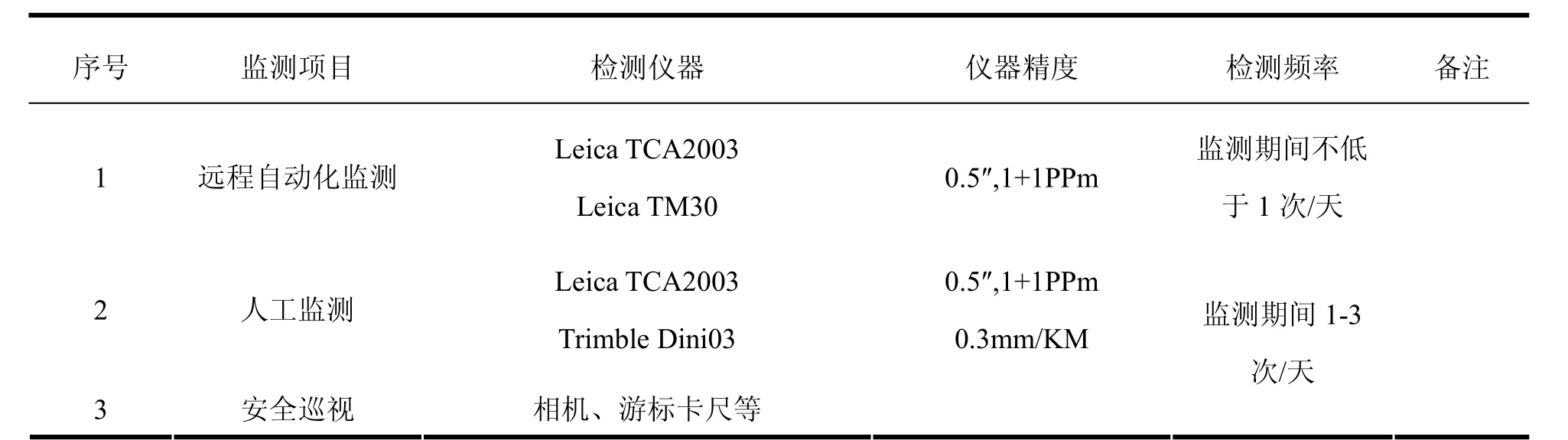
表3 人工监测仪器、精度及频率
7.1 盾构施工过程监测措施
(1)在施工过程中,采用测量机器人对工程施工影响范围内既有地铁车站结构、道床进行全自动化监测,同时采用人工监测进行检核,监测仪器、精度及频率见下表:
(2)施工时进行实时监控,根据现场实际情况加强监控量测,提高监测的数量及频率,根据监测反馈信息,及时采集监测数据并分析监测结果,根据监测结果指导并调整施工参数。
7.2 加强对既有线轨道及结构的保护
(1)施工前应对轨道几何尺寸、道床裂缝、钢轨及线路状态进行全面检查,对不符合要求地段进行整修;
(2)对受上跨影响地段的轨道采取防脱轨护轨、轨距拉杆等轨道加强措施;
(3)加强对穿越段2号线区间既有结构现状的调查,对既有结构的裂缝应进行处理,危险地段应对结构进行加固;
8 结语
盾构机上跨既有地铁线路施工前期准备(尤其是既有地铁线路情况摸排的越细越好)非常重要,合理的掘进施工参数是基前提条件,施工监测和施工掘进配合是关键,应急预案是穿越风险控制的根本保障。
猜你喜欢
山东中医药大学学报(2022年5期)2022-10-26
现代中医药(2022年4期)2022-08-02
陕西中医药大学学报(2022年4期)2022-08-01
建材发展导向(2021年11期)2021-07-28
长江丛刊(2018年27期)2018-11-14
中国设备工程(2018年16期)2018-08-23
中国水利水电科学研究院学报(2018年3期)2018-07-20
浙江大学学报(工学版)(2016年11期)2016-06-05
中国房地产业(2016年9期)2016-03-01
中国工程咨询(2015年9期)2015-02-25
