基于四象限探测的激光跟踪系统的设计与实现
2019-06-26 07:57刘思鸣邓德迎
桂林电子科技大学学报 2019年1期
刘思鸣, 何 宁, 邓德迎,2
(1.桂林电子科技大学 信息与通信学院,广西 桂林 541004;2.桂林航天工业学院 广西高校无人机遥测重点实验室,广西 桂林 541004)
激光跟踪具有高精度、无导轨、大范围、实时动态等优点,它集计算技术、电子技术、精密机械、控制技术于一体,在激光制导领域有着广泛应用[1]。激光跟踪是实现激光精确制导的基础,经过四十多年的快速发展,激光制导技术和各种激光制导武器已成为高科技的现代和未来战争克敌制胜的重要手段,其中激光制导武器系统具有制导精度高、抗干扰能力强、结构简单、成本低等优势,因而各军事大国都竞相开展研制[2]。针对激光跟踪系统快速对准能力问题,应用位置传感器完成光斑位置检测与信息接收,通过平衡状态误差分析,采用伺服系统控制实现激光目标的快速跟踪,经实验测试,系统能获取跟踪目标的方位信息,并利用干扰激光对跟踪目标实现锁定指向,为系统应用研究奠定基础。
1 四象限探测原理
四象限探测器的本质是一种光电四元传感阵列,在一块硅材料基片按照笛卡尔坐标系对称分成4块,分别对应探测器的4个象限[3]。它是基于光生伏特效应制作而成,探测器结构如图1(a)所示[4]。当入射光斑落入四象限探测器光敏面的不同位置时,各象限接收的光照与输出电流从中心向四周成正比关系,图1(b)所示为器件光敏面物理位置与转换输出后的电压对应变化曲线。通过处理四象限输出的信号,可以确定光敏面上入射光斑的质心位置[5]。

图1 四象限探测器结构及电压特性
已知四象限探测器的输出电压为0~± V,(x,y)为激光照射到四象限探测器上的任意一点,电压和位置的关系系数为k,若四象限探测器上不同位置输出电压分别为V1、V2、V3、V4,根据式(1)可求得四象限探测器上光斑中心的位置[6]。
(1)
设透镜与光敏面距离固定为f(透镜的焦距),图2所示为射线关系定义的四象限探测器测量目标的俯仰角和方位角。图中激光通过透镜汇聚到四象限探测器的第一象限,光斑中心为(x,y),则俯仰角α和方位角β可通过式(2)得出[7-8]。
(2)

图2 四象限探测器探测原理
由四象限光敏面光照位置与输出电压关系,可判断被跟踪目标与光敏面中心是否同一轴线,为伺服系统提供控制依据。
2 硬件系统设计与实现
激光跟踪伺服系统的控制过程是状态随激光目标位置变化的被动跟踪闭环控制系统,系统开始运行,四象限探测器受伺服云台控制在一定方向进行自动搜寻,当四象限探测器搜索到激光目标,系统启动激光跟踪对准程序,进入激光目标自动跟踪模式。激光跟踪控制系统原理框图如图3所示。

图3 激光追踪系统原理框图
系统主要分为光电探测、运动控制、上位机监测和激光干扰4个部分。图3中A/D转换模块的电源电压为5 V,分辨率为12 bit,则采样精度为5/212,可在0~6 V范围内进行采样。因四象限探测器输出模拟电压范围为-2~2 V,所以在A/D转换之前需采用模拟加法器将四象限探测器输出的-2~2 V电压抬升至0~4 V,使它与A/D转换的电压极性范围对应。因此,转换后的0~2 V电压范围对应四象限探测器实际输出的-2~0 V,而2~4 V电压范围对应四象限探测器实际输出的0~2 V。若四象限探测器原输出电压为U,经电压抬升后为U+2,则A/D采样后对应的点数应满足
(3)
运动控制部分:探测器上的光斑位置信息经单片机分析处理后,通过串口发送相应命令至运动控制卡,控制伺服电机调整跟踪系统姿态,实现对被测目标快速、准确跟踪,完成激光目标锁定。
上位机监测部分:受伺服云台搭载控制的电子陀螺仪与四象限探测器同步运动,采用电子陀螺仪感知本体和测头三轴的角度值,通过对比得出测头和系统本体的相对角度值,用于后续的误差补偿来提高测量的精度。采用陀螺仪模块提供的4个扩展IO即D0~D3口,可将四象限探测器输出的光斑位置信息与陀螺仪自身测得的系统姿态信息一起通过串口传送至上位机以图、文等信息显示。
激光干扰部分:通过单片机分析判断激光是否照射至四象限探测器光敏面的正中心,以实现对激光目标的锁定,并输出变频驱动信号启动与伺服云台同步运动的干扰激光器发射激光,对目标实施干扰警示。
3 上位机监控界面软件
上位机监控界面主要实现对系统姿态的检测与图形化处理。根据系统方案设计要求,上位机系统划分为信息采集和数据处理2部分。陀螺仪接收四象限探测器的光斑位置信息,并把采集到的位置偏离信息与系统姿态信息一起送至上位机,采用数字、波形、文字、示意图形式显示,以便对被测目标方位进行直观的实时监测。
上位机显示界面采用C#语言在VS2013环境下进行设计,包括串口设置、实时方位数据显示、实时方位的曲线绘制、实时方位表盘指示、实时方位文字说明和四象限探测器状态显示6部分,虽然方位角度表示的形式有所不同,但是为了方便观测,以不同颜色区分三轴关系,而同一角度为同一颜色。
串口设置用于选择串口及波特率。
实时方位数据显示部分用于显示由陀螺仪回传的数据帧计算得出的系统姿态角度。
实时方位曲线绘制部分是通过chart图表控件,把激光跟踪系统的三轴姿态数据分别在3个series上表示,通过时间-角度曲线可以知道系统姿态角度的变化过程。当系统稳定对准目标时,图中的曲线是稳定的近乎水平的直线,当系统姿态发生改变时,曲线发生波动变化。
实时方位表盘指示是把系统三轴姿态角所在平面表示出来,每一方位角度指针的指向表示在此维度的平面上目标所在的方位。
实时方位文字说明便于迅速得知目标的地理方位,本系统的姿态角度是基于机体坐标系下的姿态,当x轴方向的角度为正时,对应系统的俯仰角为正,此时可认为目标在系统水平面的上方,反之为下方。同理y轴为正值时对应目标方向为东,负值时为西;z轴为正值时对应目标方向为南,负值时为北。
四象限探测器状态显示部分是根据四象限探测器输出的信息,模拟转化在上位机实时位置显示,便于监测目标激光光斑落在四象限探测器上的位置偏离及共轴关系。
4 实验测试及分析
测试系统采用波长为532 nm、功率输出范围为0~100 mW可调激光器作为被测目标光。
为了便于观测数据变化,先调整电机的姿态,使x,y,z三轴的角度归零,如图4所示,上位机界面左侧三轴的角度值基本在0°附近,此时陀螺仪时间-角度曲线图上可以看到调整陀螺仪角度归零的过程,右侧上方绿色的方位指示盘指针也归零。右侧下方黑色的模拟四象限探测器上光斑位置显示此时激光在探测器的中心。
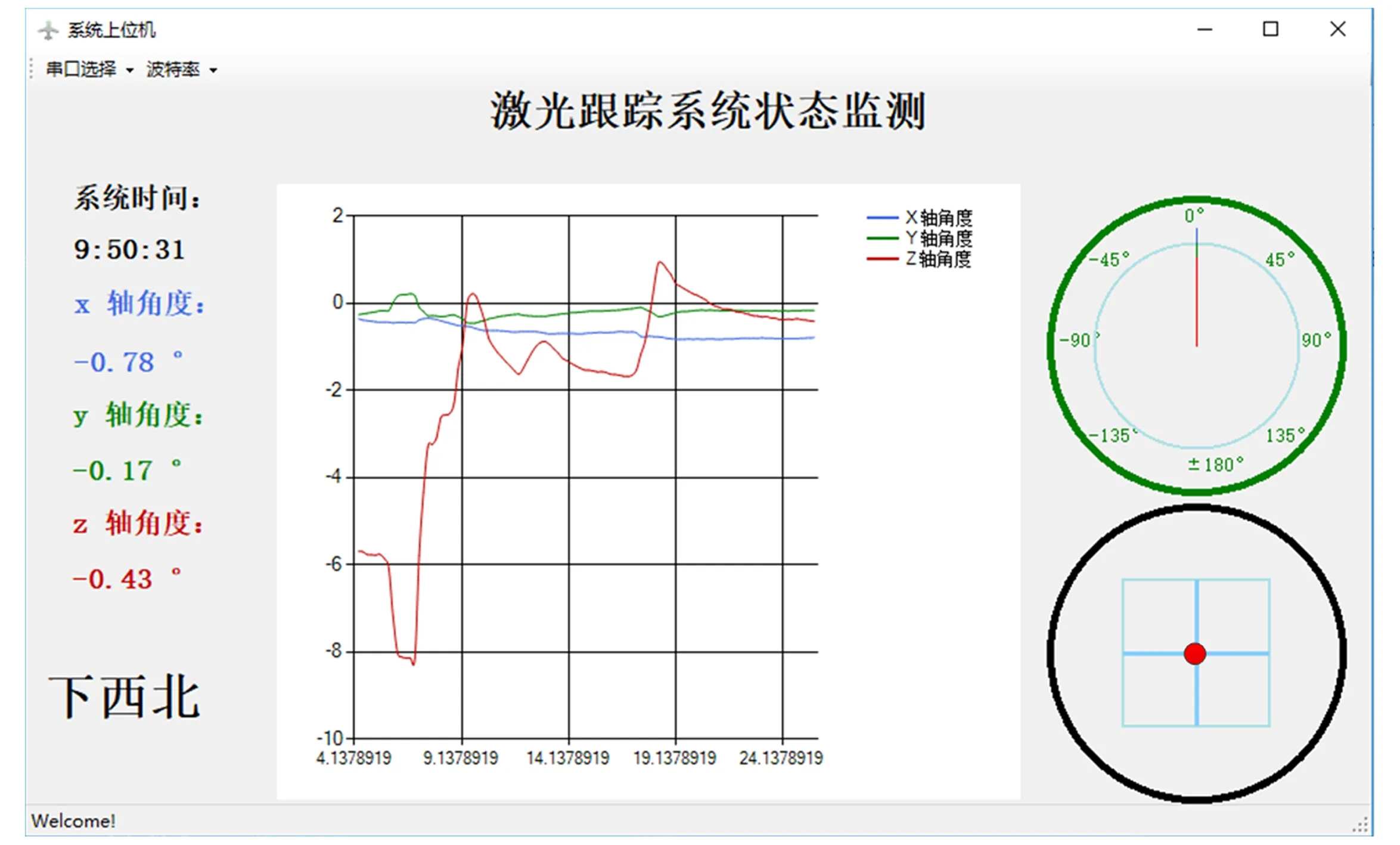
图4 陀螺仪三轴归零
当目标激光光束的位置偏离,此时系统的姿态还未发生改变,三轴的角度还是0°,时间-角度曲线图和绿色的方位指示盘指针的示数都未发生改变,而光斑位置偏移到了如图5所示的第三象限。
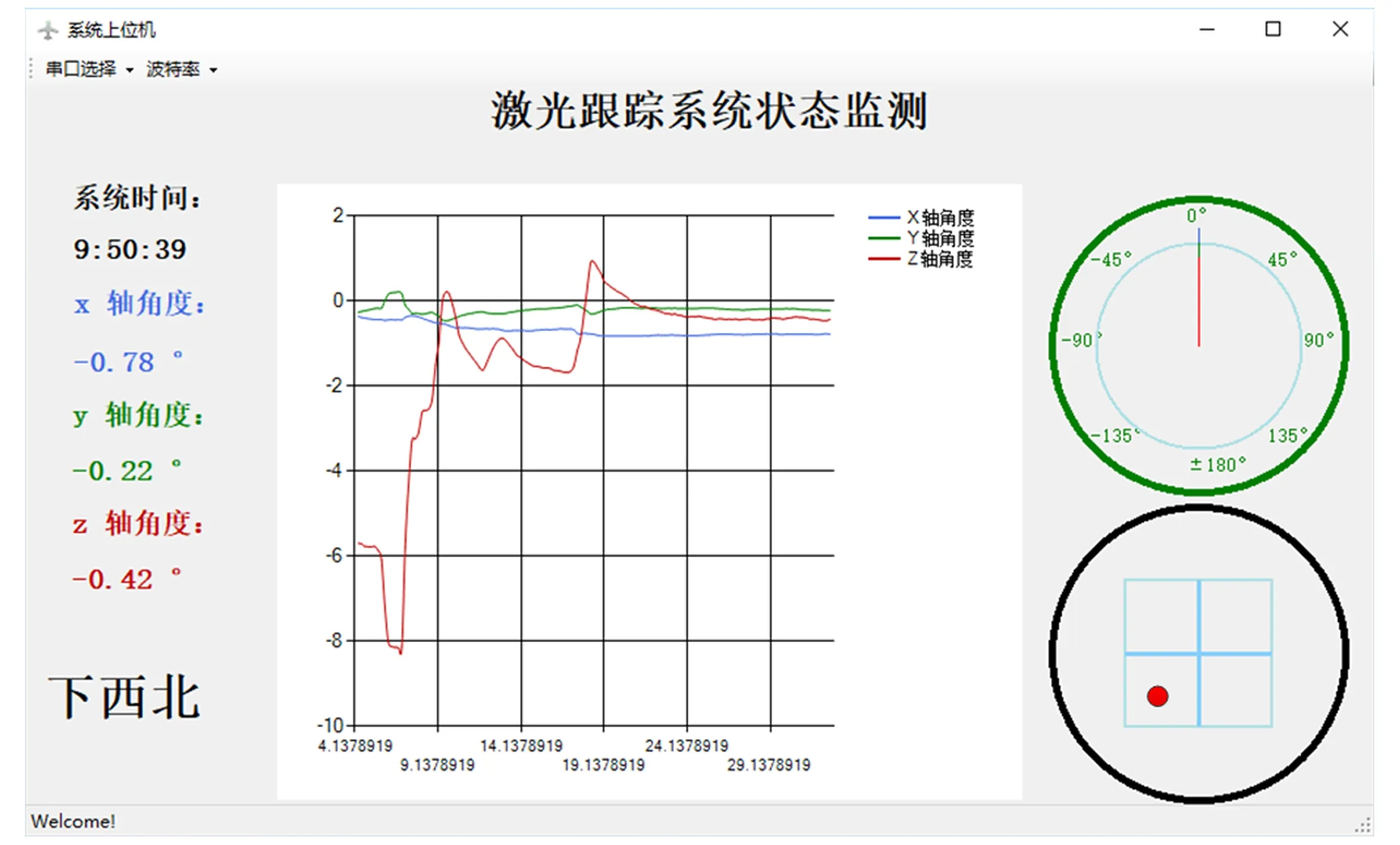
图5 目标激光器偏离后的上位机界面状态
由于检测到四象限探测器输出误差信号,激光跟踪程序根据激光光束的位置控制伺服系统进行调整。若光斑重新稳定在四象限探测器中心时,上位机各轴的姿态角度数值如图6所示。

图6 系统重新跟踪锁定稳定后的上位机界面状态
由上述状态变化过程可测得,四象限探测器的输出x,y轴电压值分别为0.81 V和-1.36 V,代入式(1)和式(2)后,计算得到俯仰角及方位角为6.13°和-9.89°,与上位机显示的测量角度值误差δx和δy为
由以上实验测试结果可知,激光系统跟踪误差约为0.1%。
伺服电机采用的是安川Σ-7系列的20线伺服电机,在位置控制方式下其步长为
单片机发送一帧命令时间为1.5 ms,每帧命令控制伺服电机转动100个步长,则伺服跟踪速度为
5 结束语
讨论了基于四象限探测器的激光跟踪系统技术实现,分析四象限探测原理和光照位置/电压关系,搭建了满足跟踪速度和一定精度要求的硬件系统,采用C#语言在VS2013环境下开发了上位机监控的图形用户界面,通过闭环激光目标伺服跟踪控制系统的实验测试表明,采用四象限探测器构建的激光伺服跟踪系统能快速锁定激光目标,并以变频输出功率为100 mW的激光实施指向干扰,在目标位置±20°移动变化时,系统跟踪的误差约为0.1%,跟踪速度可达到22.6°/s。
猜你喜欢
现代食品科技(2022年8期)2022-09-02
中学生数理化·高一版(2022年3期)2022-04-05
幼儿园(2021年12期)2021-11-06
初中生学习指导·提升版(2020年10期)2020-09-10
阅读(高年级)(2019年9期)2019-11-15
阅读与作文(小学高年级版)(2019年8期)2019-10-16
小资CHIC!ELEGANCE(2019年28期)2019-09-12
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
中国修辞(2016年0期)2016-03-20
火控雷达技术(2016年2期)2016-02-06