
基于图像处理的潘得路快速弹条扣件状态识别
2019-06-27 09:32
计算机测量与控制 2019年6期
(上海工程技术大学 城市轨道交通学院,上海 201620)
0 引言
近年来我国的高速铁路以及城市轨道交通高速发展,钢轨扣件作为轨道的重要组成部件之一,其良好的状态为高速铁路及城轨交通的安全运行提供有效保障。潘得路快速弹条扣件(又称FC扣件)作为新型轨道扣件,已被广泛应用于欧洲(CEN)、德国(DB-AG)、法国(SNCF)、日本(RTRI)、澳大利亚(AS)及北美(AREA)等国家的铁路上[1]。同时,也是引进中国应用在高铁客运专线上的轨道扣件,现已引入FC扣件的线路有合武客运专线线两段,石太客运专线[1]。
针对轨道扣件状态的检测,Jinfeng Yang等学者采用方向场描述扣件特征,根据线性分析方法获得的权重系数矩阵匹配标准模板和测试图像,从而实现对扣件是否存在状态的检测[2-3];Babenko P.、Shah M.等学者在SIFT特征的基础上运用马赫滤波器和支持向量机检测扣件的存在与否[4-5];李永波等学者采用梯度方向直方图和主成分分析方法提取扣件特征,之后采用支持向量机进行分类[6];Yiqi Xia等学者用Haar特征描述扣件图像,再用AdaBoost分类方法达成识别扣件状态的目的[7];Khan R.A.在HarrisShi-Tomasi角点检测的基础上用模板匹配的方法来识别扣件弹条的状态[8]。目前国内针对轨道扣件状态检测方法的研究主要针对ω型弹条扣件,而对潘得路快速弹条扣件状态检测的研究很少。
本文针对潘得路快速弹条扣件的扣紧状态和非扣紧状态的检测,设计一种基于外触发模式同步控制线阵相机的方法,以保证线阵相机在列车做变速运行情况下采集的轨道扣件区域图像不产生纵向畸变(拉伸或者压缩);接着对采集得到的图像进行基于灰度直方图均衡化[9]和中值滤波[10]的预处理,以改善采集图像的对比度、减小白噪声的影响;之后,利用十字交叉法[11-12]实现采集图像中的扣件区域定位,并提取出该扣件区域图像;对所提取的扣件区域图像,采用基于快速归一化积相关算法的模板匹配定位扣件绝缘帽及固定螺栓并获取其中心坐标参数;根据定位获取的相关中心坐标参数,提出一种基于特征距离的扣件状态识别方法。
1 系统结构
系统结构如图1所示,其是在同步控制线阵相机采集图像的基础上进行对FC扣件状态的识别。图像采集系统主要由线阵相机、光源、滤光片、光电编码器和工控机构成。光电编码器输出对应行车距离信息的脉冲数,并以此脉冲通过外触发模式同步控制线阵相机的行频,保证线阵相机采集的图像不产生纵向畸变(拉伸或压缩)。扣件状态识别主要由扣件定位和特征距离计算部分构成。将采集到的图像通过灰度直方图均衡化增强对比度和中值滤波去噪等预处理,利用十字交叉法对预处理后的图像进行扣件所在区域的定位并提取;通过基于快速归一化积相关算法的模板匹配将所提取的扣件区域中的扣件绝缘帽及固定螺栓定位并获取其中心坐标参数;根据这些坐标参数,计算特征距离并进行分类统计以实现扣件状态的识别。
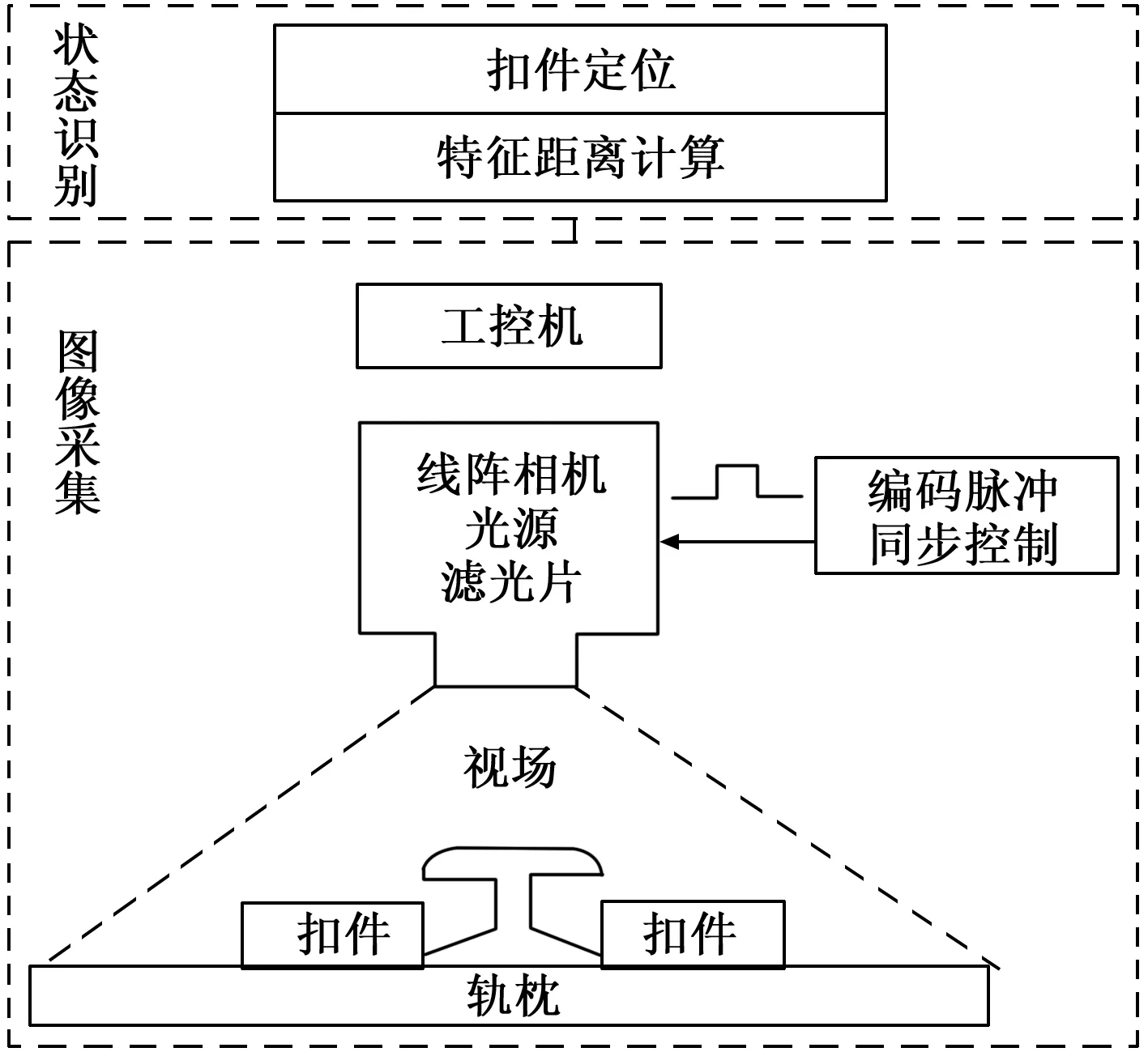
图1 系统结构
2 线阵相机的同步控制采集图像
列车在实际运行过程中,由于其加速及减速阶段等现实原因,致使其不能够总是匀速运行,这样就无法满足线阵相机采集图像时保证图像不产生纵向畸变(纵向的拉伸或者压缩)。为了解决此问题,关键就是要实现以列车运行距离信息来同步控制线阵相机的图像采集。线阵相机的主要技术参数是其行频,即线阵相机每秒所曝光的次数。根据线阵相机的外触发模式,可以设计一种通过光电编码器匹配列车运行距离信息的方式来调整线阵相机的频率转换系数FR(Frequency conversion Rate),从而实时的对线阵相机的行频进行控制,以此实现对线阵相机采集图像的同步控制。
将线阵相机的横向视野HFOV (Horizontal Field of View)设为W(m),线阵相机的横向分辨率HR(Horizontal Resolving power)设为HR(pixel),光电编码器每转一圈的输出脉冲数设为F(个/r),编码器与检测物体接触的外接转轮半径设为R(m),光电编码器输出相数设为n相(每相有正负两个输出),则相机捕获到的编码器输出频率是其输出每相信号频率的2n倍,即2nF。根据这些参数可以计算出控制线阵相机的频率转换系数FR。
则相机的纵向放大倍率VPM(Vertical Promote Multiple rate)为:
(1)
相机的横向放大倍率HPM(Horizontal Promote Multiple rate)为:
(2)
相机的频率转换系数FR为:
(3)
根据所求得的FR参数,设置线阵相机频率转换器中的参数,从而实现线阵相机采集图像的同步控制。这样保证了线阵相机能够在列车以变速运行的情况下采集非畸变的轨道扣件图像。
3 扣件状态识别算法
在线阵相机所采集获取的轨道扣件图像的基础上,对采集到的图像进行基于灰度直方图均衡化和中值滤波的预处理,利用十字交叉法对扣件区域进行定位并提取;之后对所提取的扣件区域采用基于快速归一化积相关算法的模板匹配定位到扣件绝缘帽和固定螺栓,并获取其中心坐标参数;最后通过计算扣件绝缘帽和固定螺栓中心坐标的特征距离,并以此特征距离为判决条件实现扣件状态的识别目的。
3.1 基于FNCC算法的模板匹配定位
快速归一化积相关算法(Fast Normalized Cross Correlation,FNCC)是基于归一化积相关算法(Normalized Cross Correlation,NCC)的改进,通过减小每次匹配过程中的计算量,达到在保证匹配精度的前提下提高匹配速度的目的。FNCC算法的原理如下:
设S(x,y)为m×n的搜索图,T(x,y)为M×N的模板图,其误差平方和测度公式为:
(4)
式(4)中,1≤i≤m-M+1,1≤j≤n-N+1。D(i,j)越小,则两幅图越相似。把公式(4)展开可得:
D(i,j)=

(5)
式(5)中右边三项分别为:
(6)
式(6)中,Ds(i,j)为搜索图像中与模板图像对应区域的能量,其与所搜索的区域像素位置(i,j)有关,并且随着(i,j)的变化而逐步变化;Dst(i,j)是模板图像与搜索图像对应区域的互相关函数,它随着像素位置(i,j)的变化而变化,当T和S中对应区域相匹配时,Dst(i,j)取得最大值;Dt(i,j)是模板图像的能量,它与图像像素位置(i,j)无关,是一个常数。因此,采用互相关误差平方和测度公式:
(7)
对式(7)归一化得:
R(i,j)=
(8)
由式(8)知,R(i,j)越大,Si,j与T越匹配,当Si,j=nT,时(n为正整数),R(i,j)最大,且为1。在此基础上,对式(8)变换得:
R(i,j)=
(9)
对式(9)等式右边分子展开得:
(10)

R(i,j)=
(11)
由于扣件区域图像中的扣件绝缘帽和固定螺栓具有稳定且均匀的灰度特征,因此将扣件绝缘帽区域及固定螺栓区域分别制作成子模板,分别采用以上论述的快速归一化积相关算法对扣件区域图像进行模板匹配定位,以定位到扣件绝缘帽及固定螺栓的区域位置并分别获取其中心坐标参数。获取的左右扣件绝缘帽中心坐标分别记为P1(x1,y1)、P2(x2,y2);获取的左右固定螺栓区域中心点坐标分别记为O1(x3,y3)、O2(x4,y4)。定位到的扣件绝缘帽中心坐标以及固定螺栓中心坐标,将用于下文所述的基于特征距离的扣件状态识别算法。
3.2 基于特征距离的扣件状态识别
在上文所述基于快速归一化积相关算法的模板匹配定位扣件区域特征的基础上,根据所获取的扣件特征区域中心坐标,提出了本文针对潘得路快速弹条扣件状态识别的算法,即基于扣件特征距离的扣件状态识别算法。该算法主要分为两种,一种是基于扣件绝缘帽特征距离的扣件状态识别算法,另一种是基于扣件弹条特征距离的扣件状态识别算法。下面首先详细介绍基于扣件绝缘帽特征距离的扣件状态识别算法。
基于扣件绝缘帽特征距离的扣件状态识别算法的原理就是对扣件绝缘帽特征区域的位置坐标进行计算,并与接下来论述的相对稳定的参考位置进行对比,统计所得的特征距离参数,进行分类从而得到扣件状态信息,以此实现扣件状态识别的目的。该算法能够定量的给出扣件所处状态的像素距离参数,直观的表明了所需检修的扣件数目。
计算特征距离需要选取一个相对稳定的参考位置。由于列车车轮一般为圆锥踏面,搭载在列车上的相机也会随列车横向摆动,采集获取的图像中钢轨表面中心线并不一定在图像的正中央,因此无法选取钢轨区域的中心线作为参考位置。相对的,由于FC扣件的固定螺栓(钢轨左右各一个)位置相对固定,具有良好的参考价值。如图2,选取左右两个固定螺栓中点O1和O2连线的中点O(x0,y0)作为特征距离参考点。

图2 特征距离参考坐标图
O(x0,y0)点坐标由定位到的O1(x3,y3)、O2(x4,y4)坐标求得:
(12)
计算左右扣件绝缘帽中心点P1(x1,y1)、P2(x2,y2)和特征距离参考点O的水平相对距离Δx1、Δx2:
Δx1=|x1-x0|,Δx2=|x2-x0|
(13)
当Δx1、Δx2的值小于一定的像素阈值(该阈值通过先验实验求平均值所得),设该阈值为C1(pixel),若水平相对距离Δx1、Δx2小于该阈值C1,则扣件处于扣紧状态;相反,则扣件处于非扣紧状态。
相对的,由于潘得路快速扣件的固定螺栓(钢轨左右各一个)位置相对固定,具有良好的参考价值,也可以选取扣件弹条部位作为特征区域。从而提出基于扣件弹条特征距离的扣件状态识别算法。该算法与机遇扣件绝缘帽特征距离的扣件状态识别算法相类似,对扣件弹条特征区域的位置坐标进行计算,并与之前论述的相对稳定的参考位置进行对比,统计所得的特征距离参数,进行分类从而得到扣件状态信息,以此实现扣件状态识别的目的。
和基于扣件绝缘帽特征距离的扣件状态识别算法相同,也是选取左右两个固定螺栓中点O1和O2连线的中点O(x0,y0)作为特征距离参考点,基于扣件弹条特征距离的扣件状态识别算法的特征距离参考坐标如图3所示。选取左右两个固定螺栓中点O1和O2连线的中点O(x0,y0)作为特征距离参考点。

图3 特征距离参考坐标图
其中:O(x0,y0)点坐标由第三章定位得到的O1(x3,y3)、O2(x4,y4)坐标求得,也是由式(12)所求得。计算左右扣件弹条区域中心点Q1(x5,y5)、Q2(x6,y6)和特征距离参考点O的水平相对距离Δx3、Δx4,如式(14)所示:
Δx3=|x5-x0|,Δx4=|x6-x0|
(14)
当Δx3、Δx4的值小于一定的像素阈值(该阈值同样通过先验实验求平均值所得),设该阈值为C2(pixel),若水平相对特征距离Δx3、Δx4小于该阈值C2,则扣件处于扣紧状态;相反,则扣件处于非扣紧状态。该算法同样可以实现潘得路快速弹条扣件状态的识别,且与基于扣件绝缘帽特征距离的扣件状态识别算法相比各有特点,呈互补关系。
4 实验验证
为了验证基于同步控制法的线阵相机采集图像不产生纵向畸变,于实验室内搭建图像采集轨道车如图4所示,该图像采集轨道车的主要硬件参数及线阵相机同步控制参数见表1。根据上述论证方法所求得的FR值,设置线阵相机频率转换器中的PreDivider、Multiplier、postDivider参数。
在图像采集轨道车以变速(0~18 km/h)运行的情况下,采集得到潘得路快速弹条扣件区域图像如图5所示。
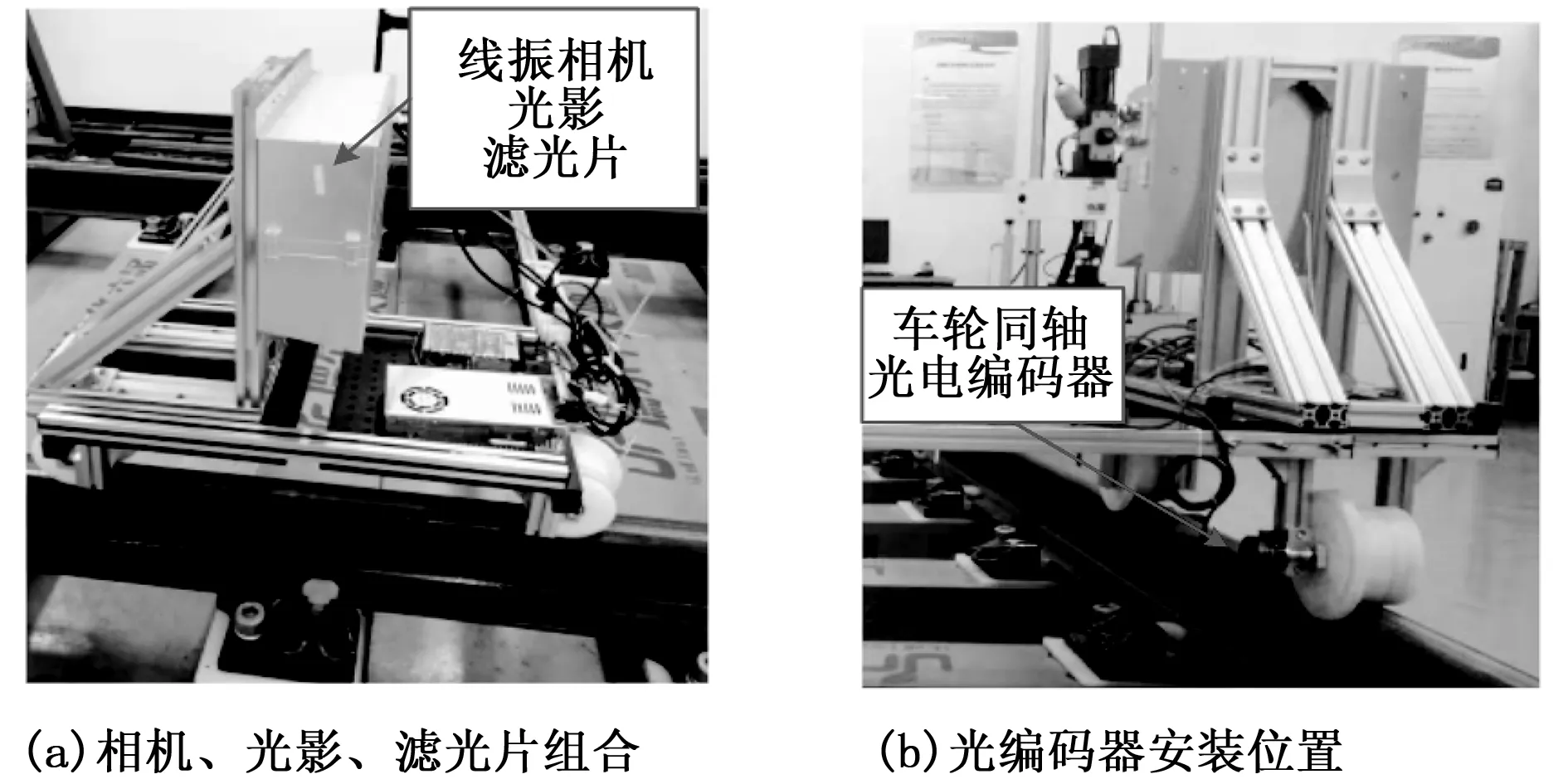
图4 图像采集轨道车

名称参数线阵相机型号Dalsa 2K GigE Line Scan Camera光源中心波长808nm光源发散角75°相机视场角67°滤光片808nm光电编码器型号Omron E6B2-CWZ1XW1000mmHR2048pixelR150mm编码器输出相数2FR0.24

图5 基于同步控制的线阵相机采集图像
由图5可看出,采集的图像没有产生纵向畸变,即纵向拉伸或者压缩,验证了这种同步控制方法能够保证线阵相机采集图像过程中不受列车速度变化的影响。
通过进一步实验验证扣件状态识别方法。在PC机Windows7操作系统下,通过Matlab2014a版本软件对采集获取的一组扣件图像(100张)进行基于灰度直方图和中值滤波的预处理,利用十字交叉法对预处理后的采集图像中的扣件区域进行定位并提取;接着通过Matlab2014a版本软件对采集获取的这组提取到的扣件区域图像分别进行基于NCC算法和FNCC算法的模板匹配定位,以实现其扣件绝缘帽及固定螺栓的定位,并获取其中心坐标。统计匹配定位这组图像使用的基于FNCC算法和NCC算法所用时间,之后分别取其平均值进行对比,对比结果如表2所示。

表2 各算法匹配定位所用平均时间对比
由表2可见,该基于FNCC算法的模板匹配在保证匹配精确度的前提下,相较于基于NCC算法,其定位扣件绝缘帽和固定螺栓所用时间都得到了有效减小,匹配定位速度提高了60%左右。
根据基于FNCC算法模板匹配定位到的这组扣件区域图像的扣件绝缘帽、固定螺栓及扣件弹条的中心坐标参数P1(x1,y1)、P2(x2,y2)、O1(x3,y3)、O2(x4,y4)、Q1(x5,y5)、Q2(x6,y6),进行基于特征距离的计算,求取相对特征距离Δx1、Δx2、Δx3、Δx4,其中阈值C1(pixel)、C2(pixel)取先验实验的平均值分别为255(pixel)和375(pixel)。利用Matlab2014a软件得到相对特征距离统计图如图6、图7所示。再由统计结果及阈值C1、C2,可对这组图像的扣件状态进行分类,扣件状态识别结果如表3、表4所示。
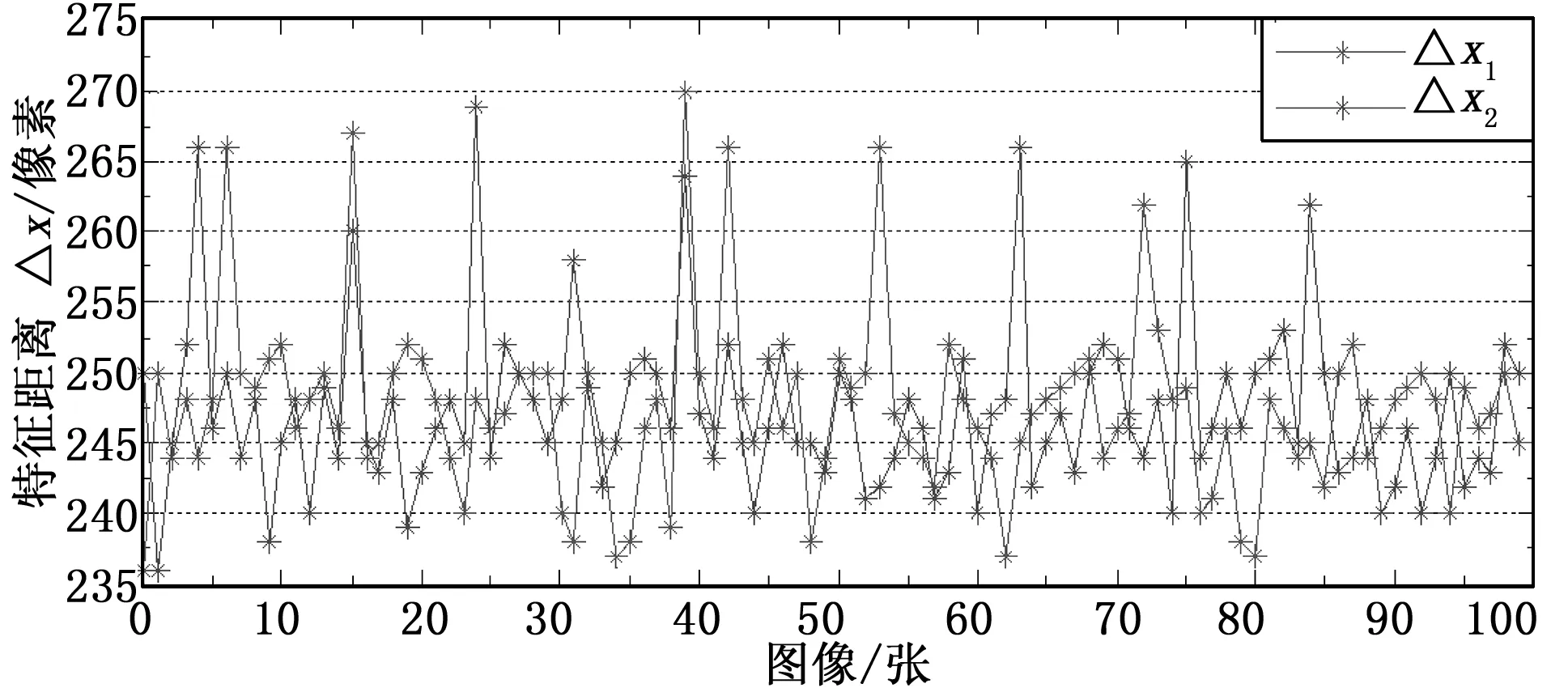
图6 基于绝缘帽特征距离的相对特征距离统计图

图7 基于弹条特征距离的相对特征距离统计图

扣件扣紧/张非扣紧/张左侧扣件946右侧扣件928

表4 基于弹条特征距离的扣件状态识别结果
将基于特征距离的扣件状态分类结果和原始采集图像扣件状态(如表5)进行对比,结果显示,基于扣件绝缘帽特征距离的扣件状态识别结果与实际情况相吻合,扣件状态识别率达到100%,而基于扣件弹条特征距离的扣件状态识别结果与实际情况出现了偏差,扣件状态识别率为99%。
表5 原始采集图像扣件状态
因为现实情况的需要,我们将两种扣件状态识别算法综合起来,做与运算的关系,即只有当这两种算法的识别结果都显示扣件处于扣紧状态时,认为该位置的扣件为扣紧状态,否则,即使有一种算法的结果显示该处扣件处于非扣紧状态时,认为该处扣件为非扣紧状态需要检修并标记。这样既能够保证扣件状态识别算法的可靠性,又有效避免了对非扣紧状态扣件的漏检,从而保障了列车运营的安全。
5 结论
为了研究针对潘得路快速弹条扣件的状态检测,采集高分辨率的潘得路快速弹条扣件图像至关重要,于是通过基于外触发模式的同步控制线阵相机方法,以保证线阵相机能够在列车做变速运行情况下采集到的图像不产生纵向畸变(拉伸或者压缩);接着对线阵相机所采集获得的图像进行数字图像预处理,之后利用十字交叉法实现扣件区域的定位并提取;然后采用基于快速归一化积相关算法的模板匹配定位扣件区域中的扣件绝缘帽和固定螺栓,并获取其中心点的坐标参数;在此基础上提出一种基于特征距离的扣件状态识别方法。该基于特征距离的扣件状态识别方法分为两种,一种是基于扣件绝缘帽特征距离的扣件状态识别算法,另一种是基于扣件弹条特征距离的扣件状态识别算法。
通过搭建图像采集轨道车实验验证了该同步控制法能够保证线阵相机在列车变速运行时所采集的图像不会产生纵向畸变;进一步通过实验验证基于快速归一化积相关算法的模板匹配相较于基于归一化积相关算法的模板匹配速度提升了近60%;同时通过实验验证了该基于特征距离的扣件状态识别方法能够实现潘得路快速弹条扣件状态的识别。
猜你喜欢
科技视界(2022年22期)2022-11-10
时代汽车(2022年13期)2022-07-05
科技创新与应用(2022年14期)2022-06-02
汽车实用技术(2022年7期)2022-04-20
发明与创新·中学生(2020年3期)2020-04-13
智能计算机与应用(2020年9期)2020-03-18
文萃报·周五版(2019年11期)2019-09-10
诗潮(2019年1期)2019-01-25
哈尔滨理工大学学报(2016年2期)2016-09-12
读者·原创版(2015年7期)2015-11-29
