
基于EXCEL的动力总成悬置系统模态及解耦的计算方法与验证
2019-06-30 11:09黄燕宋树森
企业科技与发展 2019年9期
关键词:模态
黄燕 宋树森

【摘 要】根据动力总成悬置系统模态及解耦的计算公式,利用EXCEL自带的有限的矩阵运算函数,计算动力总成悬置系统的广义刚度矩阵K和广义质量矩阵M的逆矩阵M-1的乘积M-1×K(设其结果为矩阵A)。然后利用作者发明的一种特殊方法在EXCEL中求出该矩阵A的特征值,再利用逆冥法在EXCEL表中求出矩阵A的特征向量,最终计算出动力总成悬置系统的模态及解耦。整个计算过程庞大而复杂,但求解矩阵A的特征值和特征向量是核心,因此将重点介绍。此外,将利用工程领域应用极广的计算软件MATLAB对基于EXCEL的动力总成悬置系统模态及解耦的计算的准确性和精度进行验证。
【关键词】动力总成悬置系统;模态;解耦;EXCEL
【中图分类号】U464.13 【文献标识码】A 【文章编号】1674-0688(2019)09-0122-04
0 前言
在开发工程车和乘用车时,为了整车的驾乘舒适性和避免共振现象的发生,必须计算动力总成悬置系统的模态及解耦,以期达到良好的隔振效果和整车舒适性。该计算工作量很大,很难人工完成。所以,工程师会借助于强大的数学计算软件或物理建模软件完成相关计算。这些软件往往是商用的,计算成本较高。本文将介绍如何利用办公电脑必备的办公软件EXCEL,完成动力总成悬置系统模态及解耦的计算。基于EXCEL的计算结果与基于MATLAB的计算结果做对比,说明计算精度的一致性。这种利用EXCEL自带的函数库完成某些功能件的分析计算的方法,值得其他功能区域去探索和实践,以便降低开发成本,缓解计算资源的紧张。
1 动力总成悬置系统模态及解耦计算公式简介
2 在EXCEL表中的计算方法实现
根据动力总成悬置系统模态求解公式(7)和解耦率求解公式(9)可知,涉及在EXCEL表中构建矩阵,求解逆矩阵、求解矩阵乘积、求解矩阵特征值和特征向量等。在本文中,将结合某公司设计的一款车型悬置,重点介绍如何在EXCEL表中求解矩阵的逆、矩阵的乘积、矩阵的特征值和特征向量等。
2.1 逆矩阵的计算方法
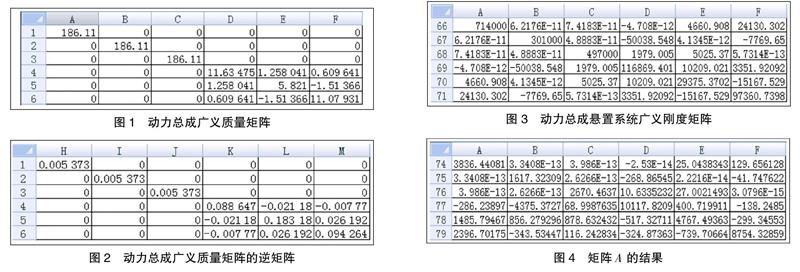
在EXCEL表中,求解矩阵的逆可以用函数MINVERSE()。在本文中,将利用该函数求解广义质量矩阵M的逆矩阵。在公司开发的车型中,动力总成的质量矩阵如图1所示,利用函数MINVERSE()计算其逆矩阵如图2所示。
2.2 矩阵乘积的计算方法
在EXCEL表中,求解两个矩阵乘积的函数为MMULT()。在本文中,利用该函数求解矩阵A=M-1×K(见公式8)。动力总成悬置系统的广义刚度矩阵如图3所示,利用函数MMULT()计算的矩阵A结果如图4所示。
2.3 矩阵特征值的计算方法
在EXCEL表中,无直接计算矩阵特征值的函数。但可以借助EXCEL表的其他函数,实现求解矩阵的特征值。设矩阵A的特征值构成的行列式为Y,并将A看作行列式,则存在行列式A-Y=0。一般,各车型的动力总成的质量在130~180 kg,其对应的矩阵A的特征值Y的取值范围在1 000~14 000。为了能够处理更轻的动力总成和更重的动力总成,我们可以适当放大特征值Y的取值范围。本文设特征值的取值范围在510~30 000。
可以按照从小到大的顺序求解特征值Y。我們先假设Y=510,代入行列式A-Y中,计算行列式A-Y的值。然后逐渐增大Y值,并依次计算行列式A-Y的值。当行列式A-Y=0时,则对应的Y值就是矩阵A的特征值。我们会在510~30 000找到6个使行列式A-Y=0的Y值。但实际计算时存在一个难解的问题:即使Y以单位1来递增,每次求行列式A-Y的值时,其值都不等于0。这说明,如果我们只将Y精确到个位数,是无法使行列式A-Y=0的。因此,我们需要取小数。但实践证明,即使我们取到了小数点后5位,也不会使A-Y=0。Y以如此小的幅度递增,会使计算量和计算数据变得庞大,甚至达到天文数字。一张EXCEL表最多含有1 048 576×16 384个单元格,即使将这些单元格都利用上,也可能无法完成如此巨大的计算。实践证明,我们不需要十分精确的矩阵A的特征值,只要将其精确到10位,就可以保证动力总成悬置系统的模态与解耦率拥有足够的精度。经过与大型商业软件MATLAB计算的结果对比,模态的精度可以达到0.1 Hz,解耦率的精度可以达到0.2。该精度完全满足任何车型的动力总成悬置系统的设计要求。将特征值精确到10位,可以极大地减少计算量。我们只需要完成(30 000-510)/10+1=29 950次计算。这样的计算次数,EXCEL表可以在数秒内完成。
精确到10位,意味着求解特征值Y的近似值。在计算过程中,肯定会发生这种情况:当Y=Yn时,A-Yn<0;当Y=Yn+1时,A-Yn+1>0,则特征值就介于Yn与Yn+1之间。所以,我们可以令特征值近似的为Y=(Yn+Yn+1)/2。这样,我们就求出了矩阵A的近似特征值。其中,n=1,2,3,…,29 950;Yn+1=Yn+10。
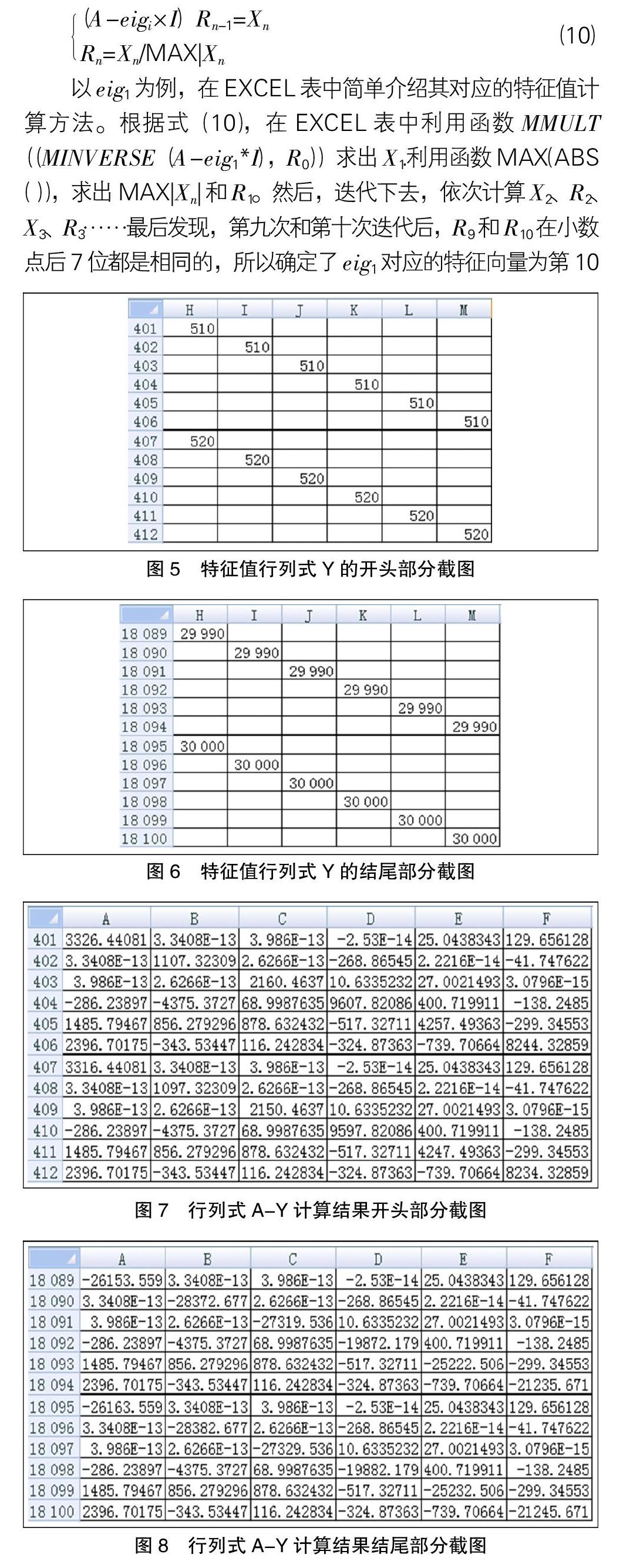
首先在EXCEL表中构建特征值行列式Y,从510开始,以10为单位步长累加(如图5和图6所示)。然后计算行列式A-Y的值(如图7和图8所示)。计算行列式的值要用到函数MDETERM()。最后判断(A-Yn)×(A-Yn+1)是否小于0,凡是小于0的,则取(Yn+Yn+1)/2为矩阵A的近似特征值。这样,我们就计算出了矩阵A的所有近似特征值,重新命名其为eig,其值为(1 475 2 655 3 705 4 835 8 845 10 235)T。
2.4 矩阵特征向量的计算方法
求得矩阵A的特征值后,需要求解特征值对应的特征向量。同样,EXCEL没有求解特征向量的函数。本文利用逆冥法[3]求解特征向量,其方法见公式(10),其中i=1,2,…,6,I为6×6阶的单位矩阵,每个特征值对应的初始特征向量为单位向量R0=[1 1 1 1 1 1]T,每次迭代后的特征向量为Rn(n=1,2…)。MAX|Xn|为数列Xn中极值的取正。按照公式(10)进行迭代计算,当相邻两次迭代Rn-1和Rn近似相等时,则Rn即为矩阵A的一个特征值对应的特征向量。
(A-eigi×I)Rn-1=XnRn=Xn/MAX|Xn(10)
以eig1为例,在EXCEL表中简单介绍其对应的特征值计算方法。根据式(10),在EXCEL表中利用函数MMULT((MINVERSE(A-eig1*I),R0))求出X1.利用函数MAX(ABS()),求出MAX|Xn|和R1。然后,迭代下去,依次计算X2、R2、X3、R3……最后发现,第九次和第十次迭代后,R9和R10在小数点后7位都是相同的,所以确定了eig1对应的特征向量为第10次迭代的结果R10,并重新命名为V1=[-0.001 062 906 1 -0.000 659 385 0.515 210 046 -0.173 737 188 0.052 904 115]T。
同理,依次计算出其他5个特征向量:
V2=[0.017 934 073 -0.000 286 984 1 0.013 295 751 -0.437 069 402 -0.078 468 667]T
V3=[0.664 140 6 -0.001 388 5 -0.025 148 703 0.081 674 249 -1 -0.456 414 39]T
V4=[0.045 221 658 0.003 542 984 0.012 140 699 -0.066 572 212 1 0.155 561 787]T
V5=[0.025 497 281 -0.009 717 558 -0.000 166 081 0.105 893 448 -0.079 668 001 1]T
V6=[-0.003 851 884 -0.030 347 53 0.001 081 269 1 -0.090 717 755 -0.172 696 521]T
2.5 动力总成悬置系统模态和解耦率的计算结果
根据公式(7),其在EXCEL表中的实现函数为SQRT(TRANSPOSE(eig))/(2*PI()),求出动力总成悬置系统的六阶频率为ω=(6.11,8.20,9.69,11.07,14.97,16.10)。再根据公式(9)和前述求得的特征向量,可以在EXCEL表中計算出动力总成悬置系统的解耦率和六阶模态对应的方向。这个在EXCEL表中都是利用现有函数实现,难度不大,因篇幅限制,在此不予介绍。最终结果如图9所示(Fore/Aft代表前后方向X,Lateral代表左右方向Y,Bounce代表上下方向Z,Roll代表绕X轴旋转的方向,Pitch代表绕Y轴悬置的方向,Yaw代表绕Z轴悬置的方向)。
3 结果验证
MATLAB因其强大的数据处理,尤其是对矩阵的处理,被广泛应用于各种工程领域。本文将利用事先在MATLAB中编制好的动力总成悬置解耦程序,用于检验基于EXCEL计算结果的准确性。计算结果如图10所示。对比图9和图10可知,频率偏差在0.1 Hz以内,解耦率偏差在0.2以内(MATLAB的解耦率表示方法采用的是小数表示,EXCEL的解耦率表示方法采用的是百分数,对比时需要注意)。这样的精度,足以满足和保证动力总成悬置系统的模态和解耦率计算的精度要求。
4 结论
利用EXCEL表可以进行矩阵求解特征值和特征向量的计算,进而求解动力总成悬置系统的模态和解耦率。
整个计算过程(包含参数输入)需要1~2 min。这与基于MATLAB的计算时间基本一致或接近。
经过与基于MATLAB的计算结果对比,计算精度与MATLAB保持一致,足以满足动力总成悬置系统的模态和解耦率计算的需求。
参 考 文 献
[1]范让林,吕振华.汽车动力总成三点式悬置系统的设计方法探讨[J].汽车工程,200(3):304-308.
[2]蒋开洪,徐驰,上官文斌.汽车动力总成悬置系统及悬置设计与实验验证[J].汽车研究与开发,2005(12):18-22.
[3]李庆杨,王能超,易大义.数值分析[M].北京:清华大学出版社,2011:308-312.
猜你喜欢
电化教育研究(2022年3期)2022-04-14
福建基础教育研究(2019年9期)2019-05-28
读与写·教育教学版(2018年10期)2018-10-25
成长·读写月刊(2018年8期)2018-08-30
计算机辅助工程(2017年3期)2017-07-13
计算机辅助工程(2012年5期)2012-11-21
