基于下肢表面肌电的驾驶员紧急制动行为识别*
2019-07-01 06:26周申培乔丙辰
武汉理工大学学报(交通科学与工程版) 2019年3期
周申培 乔丙辰 陈 云
(武汉理工大学自动化学院1) 管理学院2) 武汉 430070)
0 引 言
驾驶员的紧急制动行为识别研究一直是汽车主动安全领域的重要内容,其对紧急制动辅助系统激活时间点的确定、智能紧急制动灯的优化设计、自动驾驶系统人-机模式的平滑切换,以及线控制动系统控制信号的生成等具有重要价值[1-2].制动行为识别涉及人的复杂性和不确定性[3],现有研究主要从制动行为的执行阶段进行识别,以建立制动行为和车辆状态间的映射关系.Miller[4]将不同驾驶意图下驾驶员的操作特性和信号的界限值结合,提出一种针对避障的制动意图识别系统;Liu等[5]基于制动踏板数据对驾驶员的制动行为进行识别,并控制制动踏板的液压缸压力,使驾驶员获得良好的制动踏板感觉.王英范等[6]发现,制动踏板位移(开度)适合单独作为驾驶员制动行为识别的输入参数,可有效提高辨识准确度.然而,紧急制动情况下会触发一连串行为的级联反应,制动踏板的响应只是最后一个触发事件.
因此,本研究拟引入驾驶员下肢sEMG信号来实现驾驶员紧急制动行为的识别.通过测量下肢肌肉(包括胫骨前肌、腓肠肌和比目鱼肌)所引起的肌电活动,试图在制动踏板感应之前准确检测腿部运动,以提前识别出紧急制动行为,减少碰撞事故的发生率.另外,由于驾驶员紧急制动时的下肢sEMG信号特征与常规制动和加速换挡行为特征极为相似,故选择常规制动、加速换挡和紧急制动样本数据进行特征提取和分类识别,以提高驾驶员紧急制动行为的识别准确度.
1 模拟驾驶实验设计
1.1 实验对象
本次共招募10名身心健康且惯用右手的非职业驾驶员进行实验,年龄(24.5±2.5)岁.所有实验对象均持有驾驶执照,且具有正常或矫正到正常的视力.并在实验开始前24h内睡眠质量均良好,无不良情绪,无饮酒或服用药物的情况.
1.2 实验设备
本次实验所使用的设备包括某汽车驾驶模拟器、某ELONXI EMG 100-Ch-Y-RA肌电仪(采样频率为1 000 Hz)、RX-D2027柔性薄膜压力传感器(量程为2Kg)和基于STM32F103的数据采集与同步系统等.
1.3 实验过程
先采用ELONXI肌电仪进行最大自主收缩(maximum voluntary contraction, MVC)实验,分别测量受试者下肢胫骨前肌、腓肠肌和比目鱼肌处的sEMG信号,以用于对实验过程中所采集的sEMG信号进行非线性化处理,进而得到肌肉激活程度值.模拟驾驶过程中,受试者需根据实际交通情况进行加速换挡、紧急制动和常规制动操作,同步记录其右下肢肌肉的sEMG信号和右足底压力信号.其中,每名受试者进行45 min的连续驾驶实验.
2 肌电信号特征提取
2.1 活动段提取
活动段提取是从连续采集的sEMG数据流中提取出对应于动作执行时的有效片段,称为活动段(active segments)[7].目前,常采用滑动矩形窗从信号能量的角度对sEMG信号进行滑动分析,根据一个矩形窗内信号的能量和来判断其是否处于动作状态[8].公式为
(1)
式中:Q为t时刻滑动矩形窗内sEMG能量值;Δt为滑动矩形窗的宽度;sEMG(t)为所采集的sEMG序列.然后,分别设定动作状态能量阈值A和非动作能量阈值B,以此判定动作的起始与结束时刻.驾驶员进行紧急制动操作时,胫骨前肌处sEMG经处理后的部分活动段信号见图1.

图1 sEMG活动段
2.2 特征提取
sEMG信号较为微弱、频率低且易受干扰,主要噪声干扰源包括外部电路的工频干扰、心电干扰、相邻肌肉群的活动、AD转换器等硬件设备干扰等.因此,在进行特征提取前,先采用50Hz的陷波滤波器滤除工频干扰,再经过通带为20~500 Hz的四阶巴特沃斯滤波器进行处理.
目前,广泛采用的sEMG特征提取方法主要有时域法、频域法、时频域法、参数模型法等.相比之下,时域法、频域法和模型参数法较为常用.其中,时域特征计算速度快、实时性高且有明显的物理意义;频域特征以频率维度反映信号变化特性,平稳性好;而模型参数法可以提取信号的高维特征,其特征具有一定的频谱监视功能、较为稳定,能够满足实际要求,因此,本实验提取积分肌电值(iEMG)、均方根值(RMS)、平均功率频率(MPF)、中位频率(MF)和四阶AR模型参数(aj,j=1,2,3,4)构成特征向量.计算方法为

(2)
(3)
(4)
(5)

(6)
式中:xi为样本点;N为采样点数;P(f)为信号的功率谱密度;ni为残留白噪声;p为AR模型的阶数;aj为AR模型的系数,其可由Yule-Walker方程得到.其中,紧急制动时胫骨前肌的iEMG,RMS,MPF,MF曲线见图2,横轴为样本点数.
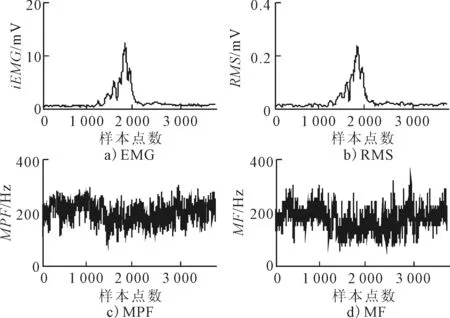
图2 紧急制动时胫骨前肌sEMG特征值曲线
3 最优sEMG分类器的设计与实现
3.1 支持向量机分类算法
针对二分线性分类问题,给定分类样本集(xi,yi),i=1,2,…,n;其中,xi∈Rn,表示数据点,yi∈(1,-1),代表类别标签.支持向量机分类算法的目标即是在当前的n维数据空间中寻找最优超平面,为
y=wTx+b
(7)
式中:w和b为待求参数.
然而,针对二维空间的线性不可分问题,需要将其向高维空间转换,进而使其变得线性可分,即转变成二次优化问题,为
(8)
式中:C为惩罚因子;ξ为松弛变量.
针对约束最优化问题,常利用Lagrange对偶性将其转换为对偶问题,通过求解对偶问题而得到原始问题的解.在此,引入Lagrange乘子对问题进行转化,那么支持向量机决策函数即为
(9)
式中:αi为Lagrange乘子;(xi·x)为两个向量的点积.
进而,采用核函数K(xi,x)来替代点积(xi·x),且由于径向基核函数(RBF)适应性强,故选用其作为支持向量机的核函数[9],分类决策函数变为
(10)
式中:σ为径向基核函数的宽度.
3.2 sEMG的多分类算法

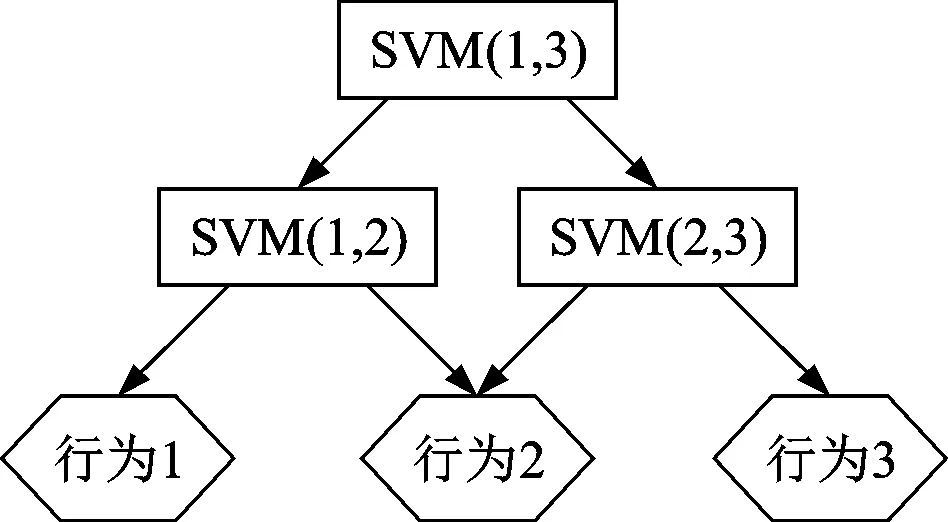
图3 有向无环图的支持向量机分类器
3.3 模型实现
结合时域法、频域法和模型参数法对所有样本信号的三类动作sEMG进行特征提取,选取iEMG,RMS,MPF,MF和四阶AR模型参数(aj,j=1,2,3,4)构成特征向量;计算训练样本的特征向量值,对有向无环图的支持向量机进行训练,并采用遗传算法对支持向机的参数进行优化,进而通过交叉验证法得到C=7.68,σ=2.91.根据特征集和最优参数建立基于sEMG的紧急制动行为识别模型,并对测试样本进行测试,以检验模型性能.
4 实验结果分析
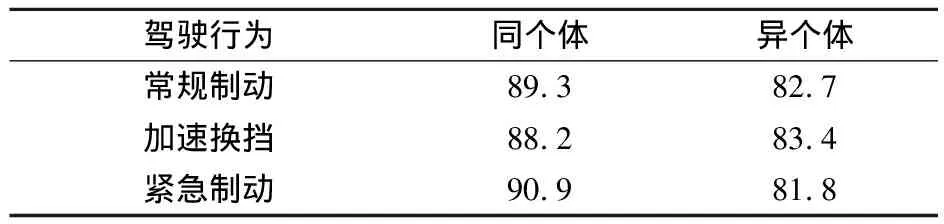
为验证本研究中特征提取方法的有效性与紧急制动识别模型的准确性,将45组数据作为基于有向无环图的支持向量机的输入,其中包括30组训练样本和15组测试样本数据.为了能够在驾驶员脚底动作执行前准确识别出紧急制动行为,选择与紧急制动行为特征相似的常规制动行为和加速换挡行为构成三种不同动作.分别针对同一驾驶员的特征数据、不同驾驶员的特征数据进行分类,并对不同个体间的不同动作进行分类,得到驾驶员3中不同动作的识别率,重点关注其紧急制动行为的识别率.将所有受试驾驶员的动作识别率求平均,获得动作识别率结果见表1.
表1 动作识别率%
89.382.788.283.490.981.8
对比试验结果表明,所提取sEMG活动段内的特征向量用于动作识别,具有较高的识别率.其中,针对常规制动、加速换挡和紧急制动共三种驾驶行为,同一驾驶员的识别率平均能达到89.5%,不同驾驶员间的识别率平均为82.6%.同时,驾驶员紧急制动行为的识别率相对较高,同一驾驶员的动作识别率高达90.9%,不同驾驶员间的识别率为81.8%.
另外,评估了在检测驾驶员紧急制动行为时,使用sEMG的辅助识别系统比以往仅依靠制动踏板反应的识别系统的提前时间,见图4.
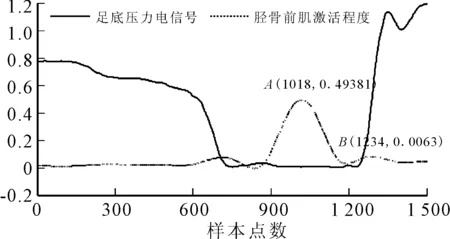
图4 时差计算示意
图4中A点为驾驶员紧急制动时胫骨前肌最大激活程度点,即足部由油门踏板抬起到最高点处;B点为驾驶员足部作用在刹车踏板时的压力开始产生点.其中,本研究可以在A点前,根据驾驶员下肢sEMG信号识别出其紧急制动行为,即能够在紧急操作制动踏板前准确识别,对每次实验进行平均计算,提前时间为220 ms;以100 km/h的行驶速度计算,制动距离将减少6.1 m.因此,采用下肢sEMG进行制动行为识别具有明显的实用价值.
5 结 束 语
提出将下肢sEMG信号引入到驾驶员紧急制动行为识别模型中,利用基于有向无环图的支持向量机构建分类器对紧急制动行为进行识别.实验研究表明,同个体紧急制动行为识别率高达90.9%,不同个体识别率平均达81.8%;且该系统能够在紧急操作制动踏板前220 ms进行识别,以100 km/h的行驶速度计算,制动距离将减少6.1 m.接一下要重点研究分类算法的改进,以提高不同个体的紧急制动行为识别率.
猜你喜欢
黄河之声(2019年23期)2019-12-17
北京航空航天大学学报(2019年9期)2019-10-26
汽车实用技术(2019年17期)2019-09-21
电子制作(2019年15期)2019-08-27
电子制作(2019年15期)2019-08-27
雷达学报(2018年5期)2018-12-05
中国高新技术企业(2017年5期)2017-05-05
软件(2016年6期)2017-02-06
物联网技术(2016年11期)2017-01-12
教育界·下旬(2016年4期)2016-11-19