基于砝码手柄识别及抓放控制系统的研制
2019-07-11 09:37黄现云董晨光朱浩蒋曦初李家沛苏州市计量测试院
上海计量测试 2019年3期
黄现云 董晨光 朱浩 蒋曦初 李家沛 / 苏州市计量测试院
0 引言
随着科学技术的进步,机器人自动化、智能化不断提高,机器人的应用渗透到工业、农业[1][2]等各个领域。计量测试也不断地涉及尖端的科学和高新技术领域,以此解决传统测试过程中效率不高,测试效率满足不了社会需求的状况。衡器中公斤砝码的检测量较大,因此针对公斤砝码,传统检测中每位检测员每天需累计搬动数吨砝码,效率低下且易使检测员落下腰肌劳损等疾病。本单位设计的公斤砝码自动检测系统可以解决上述问题。公斤砝码的抓取是自动检测系统的关键[3][4],基于机器视觉的砝码手柄识别,结合切换控制策略的变滑模柔性控制算法技术在自动检测系统中的应用,很好地解决了砝码手柄难以识别、不易抓取和放置过硬导致比较仪错误示值的问题。
1 图像处理
图像处理的目的是将摄像机捕获的砝码图像信号转换成数字图像信号,并对数字图像信号进行降噪、特征提取、识别等运算,然后识别出目标信号,并且计算出目标砝码的大小、形状、尺寸等类型、空间位置以及位姿等信息,如图1所示。
1.1 识别与定位
机器人对目标手柄的准确抓取,首先机器人必须获得待抓取砝码手柄相应的类型、空间位置以及位姿数据信息,机器人通过摄像头实现对对砝码的图像采集,然后通过算法对采集到的图像进行特征信息的提取与处理,计算出砝码手柄的类型、空间位置及位姿等信息,将这些信息反馈给控制系统以控制机器人抓手抓取砝码。
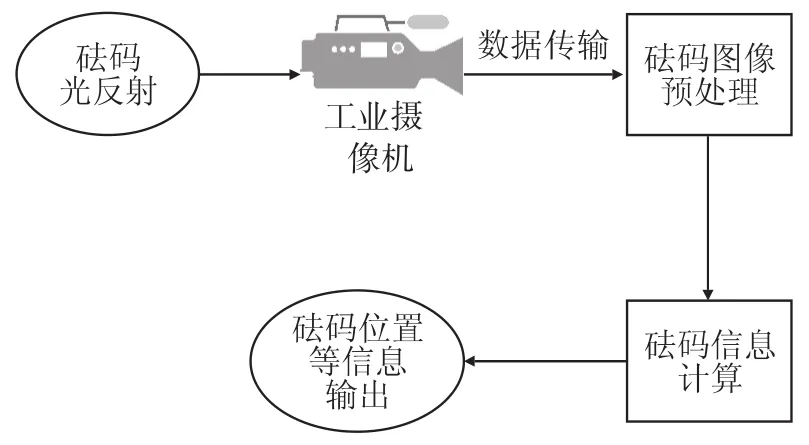
图1 砝码图像处理流程
砝码手柄的识别与定位系统,采用CCD摄像机、镜头和视觉系统控制器件组成。视觉系统控制器将图像采集卡集成于图像处理器中,处理器采用TI的数字信号处理器(DSP)和艾佐凯尔的可编程逻辑阵列(FPGA)协同处理方式,速度快且运行稳定,使其满足机器视觉实时性应用需求。
1.2 目标追踪
本系统目标追踪首先要确定工业机器人的视觉方案。本系统需要对图2中砝码手柄进行快速定位与抓取,将砝码向比较仪上放置及取下的时候,需要快速、实时、精确地计算出砝码与比较仪的距离,实现快速搬运、轻取轻放,视觉方案选择单目Eye-to-Hand视觉方案,将摄像机固定在手臂下方,通过对砝码的拍摄图像进行处理检测,并计算出砝码手柄坐标系位置以及砝码相对于比较仪待放砝码位置的坐标系位置,将信息反馈到控制系统,控制器据此实现对砝码抓放操作。

图2 目标砝码
2 机械臂结构及抓手控制
本系统设计的机器人为根据实验室空间及砝码、比较仪等信息自主设计的机器人,机器人总体结构如图3所示。根据5~25 kg砝码形状及质量特点,本系统选择交叉型叉形结构叉手,以保证叉取砝码的时候不会掉脱。
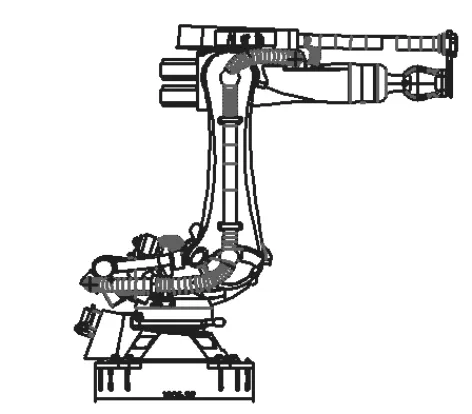
图3 机器人手臂
本系统的机械手臂需要进行抓取、提升和搬运三种运动,其中抓手需夹持砝码,因此机器人手臂设计为6个自由度,即沿X、Y、Z轴三个方向的运动和绕X、Y、Z轴的旋转运动。
机械臂的总控制器抓放控制采用PID闭环控制。当启动检测系统后,机器人通过摄像机获取砝码照片信息,照片信息经过图像处理器处理,寻找到待检测砝码后,计算出砝码手柄的空间位置和机械抓手的位置,引导机械手对砝码进行抓取。
3 切换控制策略的变滑模柔性控制算法
砝码的抓取如果过紧,容易对机器人叉手和砝码造成损坏,如果抓得过松,在机器人手臂提升及旋转的过程中容易摆动造成砝码和叉手的磨损,甚至造成砝码脱落,或者摆动造成和比较仪等设备相碰撞,影响设备运行和检测的正确性,且存在安全隐患。另外,在砝码接触比较仪到放置砝码松开、收回抓手,以及从比较仪上抓取砝码到砝码完全离开比较仪,这两个过程要求放置及抓取动作要轻,以免影响比较仪数据的准确性。鉴于此,本系统采用切换控制策略的变滑模柔性控制算法[5]。
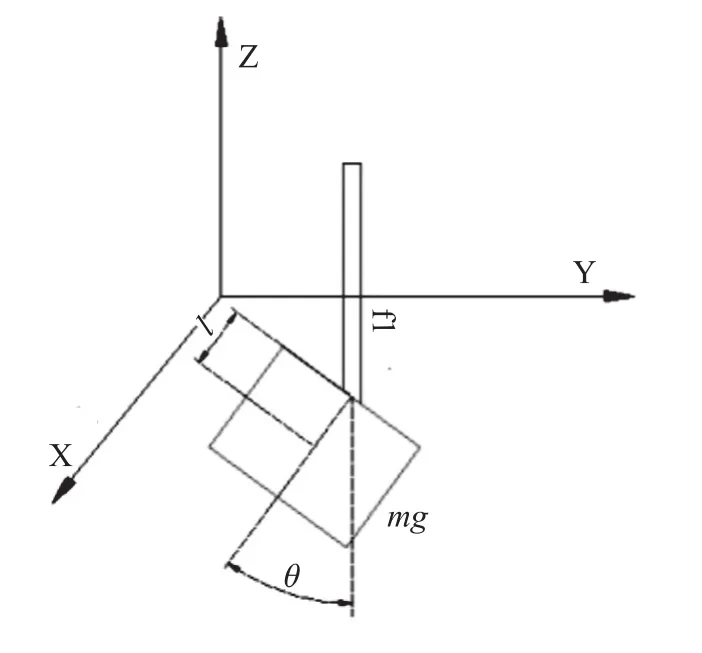
图4 抓取三维模型
图4中,m为砝码质量;l为砝码重心到抓手距离;θ为砝码摆角大小。考虑在室内且砝码质量较大,故忽略空气阻力等因素影响。
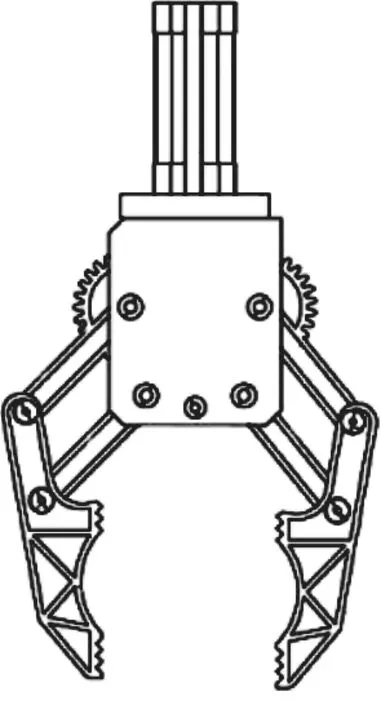
图5 抓手
在机械臂控制着砝码主方向的Vx、Vy、Vz的前提下,机器人通过系统反馈回来的砝码在三维空间的运动速度、砝码摆角和质量等信息输入变滑模控制器处理后输出抓手上作用力ux、uy、uz,以减缓砝码在抓放、搬运过程中的抖摆现象。
整体上,如图6所示,在不同的情况下使用不同的控制方法。在抓取砝码至砝码离开支撑面的过程中缓慢提升,当检测到完全离开支撑面后按规划路径做加速运动同时启动变滑模控制器,当砝码到达最高速阈值后在空中做快速匀速移动,当砝码到达路径减速点后做减速运动,在砝码到达比较仪支撑面之前将砝码速度降到较小的速度,到达距离最小阈值后关闭变滑模控制器并缓缓放置砝码,在整个加减速、搬运过程中结合变滑模控制方法防止抓放、搬运及加减速过程造成砝码的抖摆。抓手终端材料采用弹性衬垫叉手,抓手衬垫内置压力传感器,抓手通过直流电机控制,又通过图像采集器获得砝码质量、摆角,抓取时根据压力传感器反馈的力度控制抓取力度,在提升、旋转、加速、减速的过程中,结合砝码质量和加减速度值计算后输出控制抓手的各方向力度。这样既不会使砝码脱落也不会造成抓手及砝码的损坏。
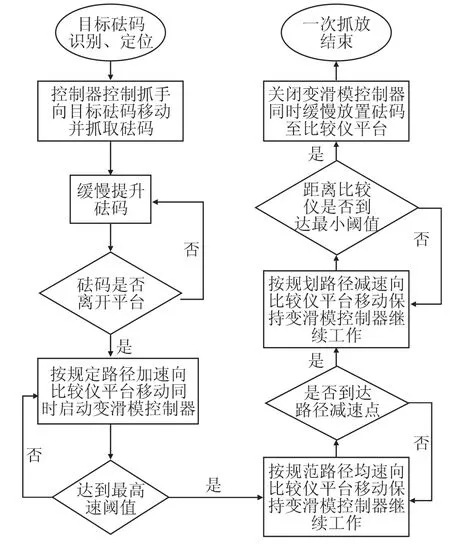
图6 一次抓放控制流程图
4 应用性能分析
4.1 效率及安全性比较
传统公斤砝码检定需要人工搬运砝码,按照JJG 99-2006《砝码检定规程》[6]进行测试。本系统只需将公斤砝码分出等级后推入实验室,启动设备,自动按照JJG 99-2006进行测试。现取10 kg的M等级砝码分别按照人工搬运方法和本系统自动搬运方法进行测试,从人力、时间、安全性上做比较。由表1可见,机器人自动抓取搬运方式较人工搬运检测在人力、效率和安全性上均有较大优势。

表1 人力、时间、安全性分析
4.2 抓取时间对比
图7是分别采用启动变滑模控制器和不采用变滑模控制器完成一次抓取所用的时间和速度仿真曲线图。启用变滑模控制器可以有效控制砝码抖摆,在保证安全的前提下可以有效缩短速度变化所需要的时间。从图中可以看出,采用变滑模控制可以有效缩短一次抓取砝码的时间,提高测试流程中搬运效率,缩短整个测试流程的时间。
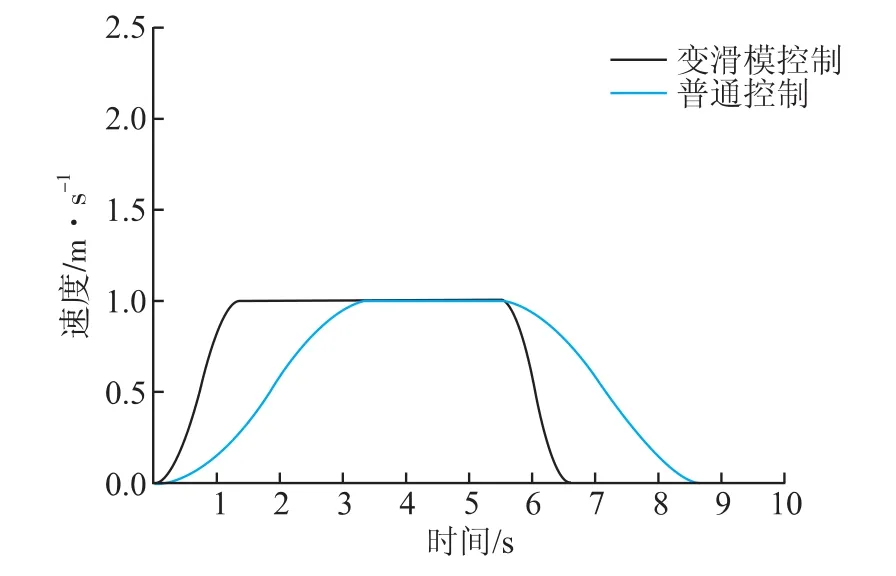
图7 一次抓取时间
4.3 对比较仪重复性测试稳定性影响实验
对比较仪重复性测试稳定性的影响涉及是否引入新的不确定度来源,直接关系到该系统是否能够代替人工应用到砝码搬运上。用10 kg的标准砝码和同一台比较仪,室内温度20 ℃,湿度为54%的条件下,分别用人工搬运和机器人搬运两种方式,按照JJG 99-2006《砝码检定规程》[6]进行重复性试验,测试对比较仪数据的稳定性影响。图8中,绿色六角星数据为人工搬运砝码测得的比较仪的数据,红色圆圈数据为本文机器人抓手搬运砝码测得的比较仪的数据。从图中可明显看出使用机器人抓手搬运对比较仪重复性测试稳定性影响明显优于人工搬运。

图8 比较仪重复性测试数据
5 结语
本文将机器视觉结合切换控制策略的变滑模柔性控制算法应用到公斤砝码抓放、搬运上,可以大幅提高搬运效率、更小地影响测试过程中比较仪的稳定性。公斤砝码的自动抓取技术是公斤砝码自动检测系统的关键,本系统的成功应用直接解决了公斤砝码自动检测系统的抓取准确性和稳定性的问题,推动了公斤砝码自动检测系统的成功应用。
猜你喜欢
商品与质量(2021年7期)2021-04-02
装备制造技术(2020年11期)2021-01-26
哈尔滨轴承(2020年2期)2020-11-06
电子制作(2019年10期)2019-06-17
电子制作(2018年19期)2018-11-14
电子制作(2018年9期)2018-08-04
电子制作(2018年11期)2018-08-04
数学小灵通(1-2年级)(2018年6期)2018-06-28
数学大王·中高年级(2015年6期)2015-06-26
科普童话·百科探秘(2015年5期)2015-05-26