基于多维度变形测量装置的边坡稳定性监测
2019-07-13 06:40邓卫卫赵初林任海锋
水利信息化 2019年3期
邓卫卫 ,赵初林 ,任海锋
(1. 贵州省地质环境监测院(贵州省地质灾害应急技术指导中心),贵州 贵阳 550001;2. 基康仪器股份有限公司,北京 102488)
0 引言
随着社会基础设施建设力度的增大及需要,近些年来在水电及其他行业出现了越来越多的高陡边坡及地质环境较差的自然高边坡,这些边坡的稳定性直接制约了工程经济的合理性和建设的可行性[1]。边坡产生滑坡时,不仅会造成一定范围内的人员伤亡、财产损失,还会对四周道路交通造成严重威胁。因此,在进行基础设施建设时,必须对周边高陡边坡稳定性给予足够的重视,必要时进行深入研究[2-6]。
近年来针对高陡边坡、自然高边坡的监测技术层出不穷[7-10]。其中,摄像法具有快速、直观、全面的特点,但精度较差;GPS 技术虽然可以实现全天候作业,精度也可以达到毫米级别[11-18],但只是对边坡表面进行测量,难以反映边坡内部的位移变化。鉴于边坡滑坡的形式和特点,专门用于监测滑坡体内部位移的测斜仪应运而生,包括固定式、滑动式测斜仪,以及新型监测技术——多维度变形测量装置。
相对而言,固定式测斜仪属于传统的测斜设备,造价较低,但仅适用于测量小变形,同时测点间距较大带来的传递杆挠曲会导致位移变化传递失真,且安装方法过于复杂,难以在同一个测斜孔中布局多个测点;滑动式测斜仪虽使用方便,设备也可重复使用,但重复性差,累积误差大,易于磨损,人工操作劳动强度大,不能实现自动化监测。多维度变形测量装置虽然设备造价较高,但由于没有固定式和滑动式2种测斜仪的缺点,应用时可得到更好的监测效果,为此应用多维度变形测量装置对边坡稳定性进行监测。
1 多维度变形测量装置安装及计算原理
多维度变形测量装置是测量系统的核心敏感元件,是一款基于连续测斜原理设计的高精度一体式测量装置,是由数个长度为 0.5 或 1.0 m 的刚性传感器节点首尾连接而组成的一个传感器阵列,传感器节点之间采用可自由弯曲的柔性节连接,以适应监测界面有较大变形时导致的传感器失效。具体装置如图1所示。
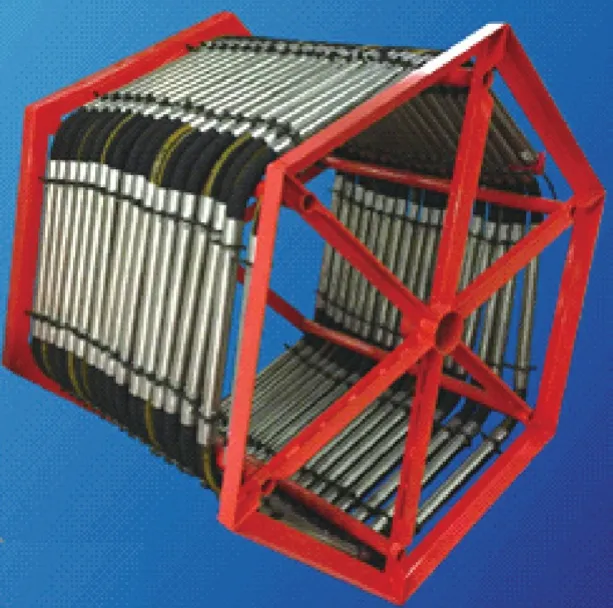
图1 多维度变形测量装置
1.1 安装方式
与传统的固定式或滑动式测斜仪不同的是,多维度变形测量装置的安装不需要专用的测斜管,安装方式非常灵活,根据不同的应用环境,不仅可以垂直安装,还可以沿结构物倾斜安装,甚至可以随着被监测物的形状进行曲面安装。但多维度变形测量装置安装时仍然要选择相对固定的点作为基准点,例如当钻孔安装时,钻孔到达基岩,则以孔底为基准点;若钻孔未到达基岩,则选择孔口表面位移监测设备的监测结果对孔口位移进行校正。
1.2 计算原理
多维度变形测量装置用于滑坡体监测时,顶部偏移量等于各段偏移量的总和,计算原理图如图 2所示。每一段的偏移量可通过公式Lsinθ计算得出,这里L0,L1,L2,…,Li分别是传感器节点间的距离,θ00,θ10,θ20,…,θi0是各段传感器节点测得的水平面方向的初始偏移角度(θ值的正负表示传感器偏移的方向),θ0t,θ1t,θ2t,…,θi t是各段传感器节点测得的水平面方向的变化后偏移角度。将每段的偏移量累加,得出孔口的偏移量。

图2 多维度变形测量装置位移计算原理
各传感器节点连接点的初始偏移量计算如下:P0点,D00=L0sinθ00;P1点,D10=L0sinθ00+L1sinθ10;Pi点,Di0=L0sinθ00+L1sinθ10+ … +Lisinθi0。发生位移后,各传感器节点连接点的偏移量计算如下:P0点,D0t=L0sinθ0t;P1点,D1t=L0sinθ0t+L1sinθ1t;Pi点,Dit=L0sinθ0t+L1sinθ1t+ … +Lisinθi t。则Pi点的偏移变化量(即位移)ΔDi=Dit-Di0。即在多维度变形测量装置的应用过程中,采用上述计算原理可得到滑坡体不同深度的水平位移。
2 多维度变形测量装置应用实例
2.1 监测装置安装
某库区地貌上形似扇状,前宽后窄,近N—S方向展布,地势西高东低,局部呈阶梯状斜坡地貌,上陡下缓,总体坡度为 30° 左右。滑坡前缘已达临江的江边,形成 50~60° 的陡坡,局部存在失稳滑动。该库区监测点处已经形成明显的滑坡后壁。
根据前期地质勘查报告,监测点所在剖面在深度 34~61 m 位置处存在1个滑移面,为确定滑移面的准确位置,并对滑坡体实施长期监测,在监测点处钻1个深度为68m 的孔,在孔中垂直安装68m长的多维度变形测量装置,钻孔底部到达监测点处基岩,故选择孔底为基准点,监测期从2017年8月19 日开始。多维度变形测量装置安装位置及传感器指向示意图如图3所示。

图3 传感器安装位置及指向示意图
2.2 监测结果分析
2.2.1X方向位移分析
2017 年8月19日—10 月21日监测点X方向位移随钻孔深度分布曲线如图4所示。
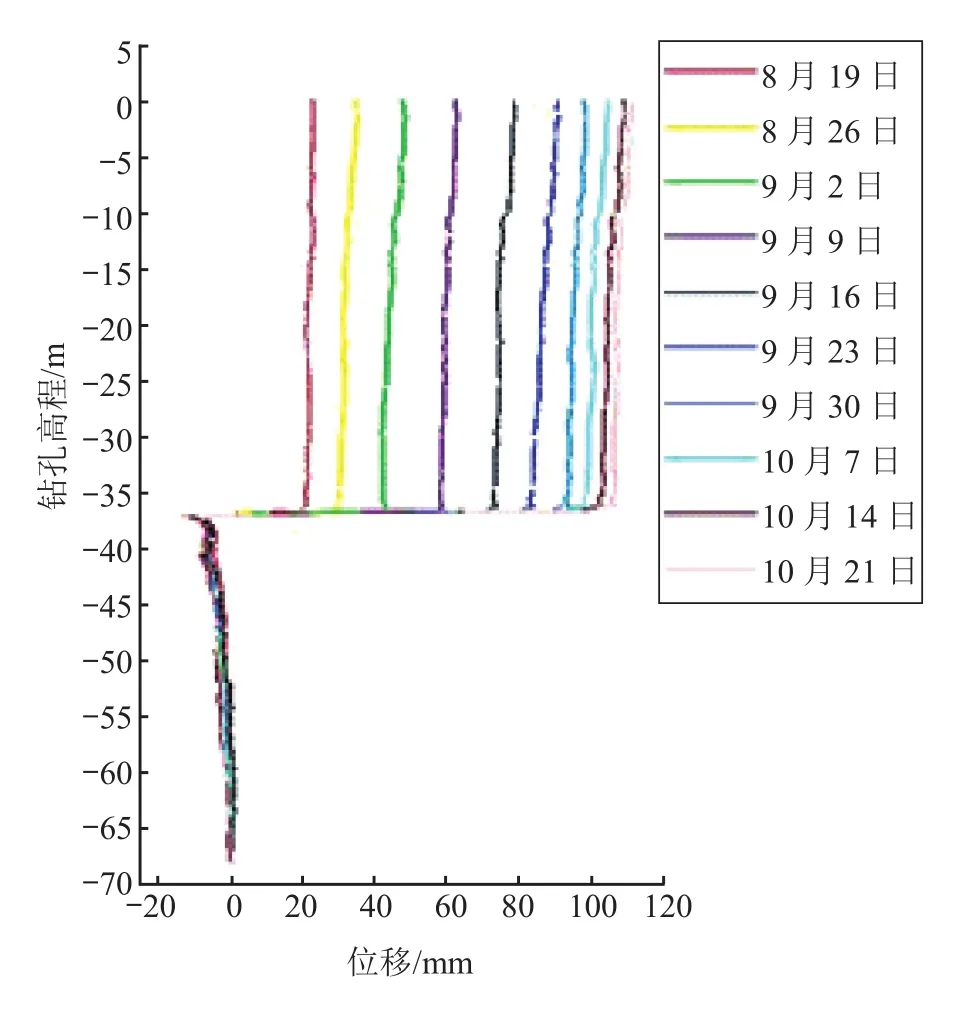
图4 X 方向位移随深度分布曲线
从图4可以看出:1)位移值在孔深 36.8 m 位置处发生突变,最大位移接近120mm。钻孔深度在0~36.8 m 和 36.8~68.0 m 之间位移相对较小,孔口相对于 36.8 m 位置处仅产生8mm 左右的位移,并且该孔段处位移朝向滑坡体的临空面;2)不同时间监测数据的曲线变化规律基本相同。由X方向上位移分布曲线可以得到初步结论:在孔深 36.8 m 位置处存在地质滑移面。
孔深 36.8 m 位置处,X方向位移随时间变化过程曲线如图5所示。

图5 孔深 36.8 m 处 X 方向位移随时间变化曲线
根据X方向位移增长速率的变化,2017 年8月中旬—10月下旬的观测期基本可以分为以下2个阶段:1)8 月中旬至9月底的位移为急速增长时期;2)10 月初至22日的位移为缓慢增长时期,但各阶段内的位移基本呈线性增长。
由于2017年 8—9 月为该水电站的主汛期,降雨量较大,而10月之后降雨量减小,由此造成滑坡体位移增长速率的变化。
2.2.2Y方向位移分析
监测点处Y方向位移随钻孔深度分布曲线如图6 所示。

图6 Y 方向位移随深度分布曲线
由图6可以看出:1)位移值在孔深 36.8 m 位置处发生突变,最大位移达到25mm,小于X方向位移值;2)孔深在 0~36.8 m 之间,Y方向位移较小,且该区间内滑坡体位移朝向临江的下游方向;3)不同时间监测的位移分布曲线规律基本相同。
Y方向上位移监测结果再次印证了在孔深 36.8 m位置处存在地质滑移面的结论。
孔深 36.8 m 位置处,Y方向位移随时间变化过程曲线如图7所示。从图7可以看出,Y方向位移增长速率的变化规律与X方向变化规律相同。分析原因,同样是由于降雨量的不同造成了Y方向位移增长速率的变化。
2.2.3 位移速率突变原因分析
36.8 m 孔深位置处,X和Y方向位移随时间变化过程曲线如图8所示。
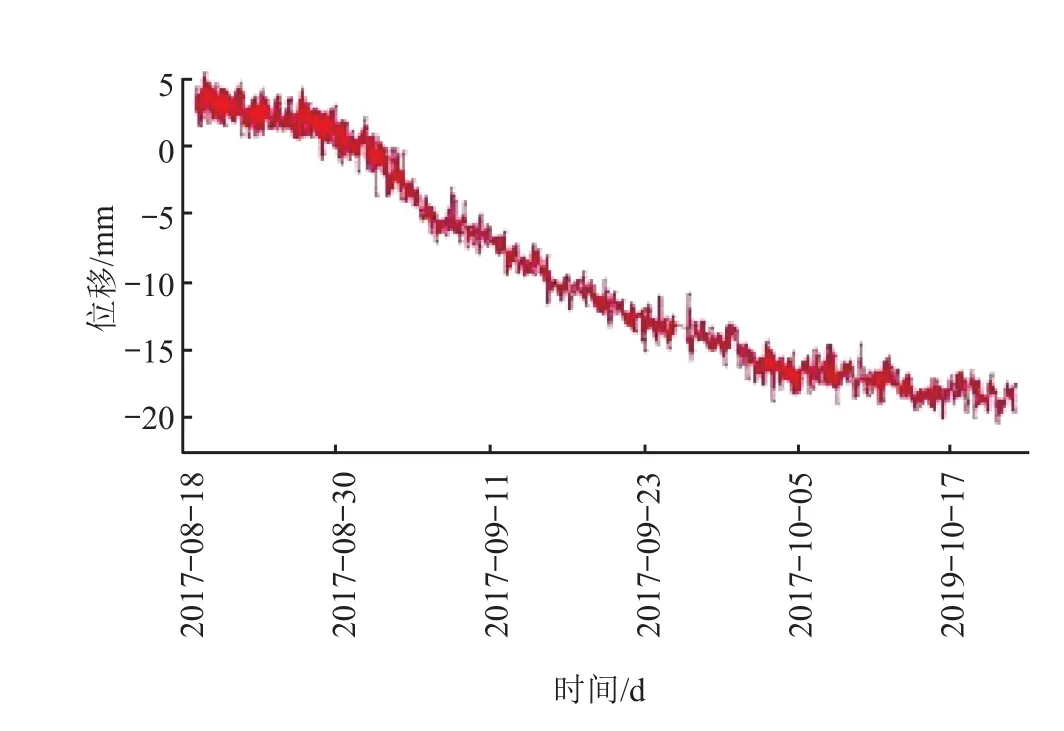
图7 孔深 36.8 m 处 Y 方向位移随时间变化曲线
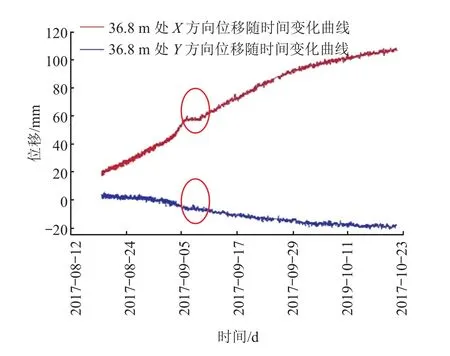
图8 位移过程曲线
观测期内2017年8月31日—9 月6日,孔深36.8 m 处X和Y方向位移速率均出现急速变化的现象(见图8中红色圈标识),结合当地降雨状况,该地8月26日—9 月4日连续强降雨10d,由于某些滑坡发生在诱发作用因素之后,因此可以认为降雨极有可能是导致滑坡体在该段时间内位移增长速率增大的主要原因。
2.2.4 Z 方向位移分析
孔深分别为 37.8,37.3,36.8,36.3 m 位置处,Z方向位移随时间变化曲线如图9所示。
由图9可以看出,在8月19日—10 月22日观测期内,孔深 37.8,37.3 m 位置处Z方向基本没有产生位移,即未发生沉降;孔深 36.8,36.3 m 位置处,均产生接近20mm 的沉降。Z方向监测结果再次证明在孔深 36.8 m 位置处存在滑移面。
Z方向沉降位移随孔深的分布曲线如图10所示。由图10可知:监测点在孔深 -36.8~0 m 处均产生 15~20 mm 的沉降,并且仅在该孔段处产生沉降,结合X及Y方向上位移随孔深分布曲线,可以得到该监测点处滑坡体厚度为 36.8 m。
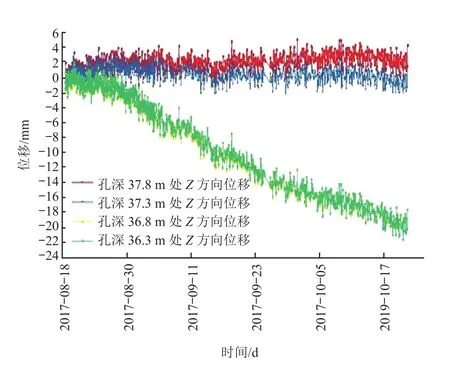
图9 不同孔深位置 Z 方向位移随时间变化曲线

图10 Z 方向沉降位移随孔深分布曲线
2.2.5 地质取芯分析
根据测点处地质取芯情况分析, 36.8 m 处进入红色中风化岩层,这个位置在地质上存在一个分界面,与观测数据吻合,从而佐证了监测结果的正确性。
2.2.6 水平合位移方位角分析
由于该段滑坡体仅在 36.8 m 以上产生较大位移,因此重点关注该段滑坡体的滑坡倾向与位移即可。水平合位移与X轴正方向的夹角分析及滑坡体滑移方向如图11所示,由图11可知,0~36.8 m 滑坡段的滑坡倾向与X轴正方向的夹角基本为 10° 左右,朝向滑坡体临江的下游。

图11 水平合位移方位角及滑坡体滑移方向
2.2.7 监测数据重复性分析
2017 年10月18日40min 内重复测量5次后得到的X和Y方向位移随孔深分布的曲线如图12所示。由图12可以得到:该时间段内位移分布曲线基本重合,多维度变形测量装置重复性较高,测量误差小于 ±2mm/32 m,可以认为在该时段内滑坡体并未产生位移。


图12 短时段内 X 和 Y 方向位移随深度分布曲线
2.3 监测设备优越性
多维度变形测量装置在应用中具有以下优越性:
1)安全监测自动化。滑坡体监测的数据采集方式要考虑数据采集的便捷性和数据获得后反馈的及时性2个重要方面。
滑坡灾害往往是瞬间发生的,人工采集往往具有一定的滞后性,不能及时反映滑坡体的实时状态。应用多维度变形测量装置,配套的自动化数据采集系统,可以定时自动采集数据,无需人工干涉,同时自动化采集的数据可以通过无线方式实时发送给用户。软件根据自动化传回的数据,可以自动形成数据报表,给用户更直观的体验。当监测数据超过预先设定的预警阀值时,自动化系统会第一时间通知用户,以便决策者在最短的时间内做出应对措施。
2)结构稳定、可靠。多维度变形测量装置采用结构防水,耐水压指标可以达到3MPa,提高耐水压指标的同时,避免了由于采用环氧树脂在温度交替变化时变成粉状而造成密封失效的现象。
多维度变形测量装置结构可靠,温度变化不会导致传感器结构变形,从而消除了温度补偿无法修正的结构变形导致的零漂带来的测量误差。
3 结语
多维度变形测量装置传感器节点之间采用可自由弯曲的柔性节连接,具有变形适应性强、量程大、精度高、稳定性好等特点。与传统监测设备相比,多维度变形测量装置不仅可以确定滑坡体滑移面的准确位置,而且可用于滑坡体的长期监测,监测效果相对更好。
多维度变形测量装置采用机械防扭、结构防水等设计,相比采用电子元件测量转动角度,无二次率定,消除了电子元件受地磁、设备本身电场等干扰带来的测量误差,但会造成设备偏重,因此,今后针对装置在安装过程中的扭转及在保证设备耐水压和耐用程度的条件下减小设备重量等问题进行进一步的研究将具有一定的实际意义。
猜你喜欢
中学生数理化(高中版.高考数学)(2022年2期)2022-04-26
陕西水利(2021年8期)2021-09-15
作文成功之路·小学版(2020年9期)2020-10-28
视界观·上半月(2020年3期)2020-10-21
装饰装修天地(2019年2期)2019-10-21
中国地质灾害与防治学报(2018年3期)2018-07-26
商周刊(2017年7期)2017-08-22
科技视界(2014年33期)2014-01-02
体育师友(2012年4期)2012-03-20
建筑科技与管理(2008年10期)2008-03-30