
基于图像识别分析探测隧道火灾的技术与创新
2019-07-20 03:14江仲庆
城市道桥与防洪 2019年7期
江仲庆
(上海浦江桥隧运营管理有限公司,上海市 200023)
0 引言
公路隧道火灾有着烟雾大、温度高;易爆炸、蔓延快;空间小、疏散难;条件差、扑救难等特点。一旦发生火灾,对隧道结构和设施造成极大破坏,对社会经济造成影响,破坏性和危险性极大。近30多年来,我国也发生过多起公路隧道火灾事故,造成较大的经济损失和较坏的社会影响。因此,公路隧道消防系统的可靠性显得尤为重要。
隧道目前常用的火灾报警系统的工作原理主要分为感温型、感光型、视频检测型等[1]。感温型火灾探测器有感温电缆、紫铜管、热敏合金线、光纤感温探测器等几种,其基本原理都是根据火灾发生后产生的热气流上升到隧道顶部后,引起隧道顶部的温度变化,然后根据温度变化量来实现火灾探测和报警。感光型在隧道中应用的主要是双波长火焰探测器,其对火灾中辐射光的闪变的两种波长进行比较,从而准确地判断出是否发生火灾。视频检测型是利用计算机技术,通过视频检测到烟雾和火焰从而直观地发现火灾。甘肃省交通规划勘察设计院宿增强[2]提出基于线型感温+点式感光技术的公路隧道火灾报警系统,结合了光纤光栅线型感温火灾探测和图像感光探测的技术优势,提升了隧道火灾探测精度和可靠性,其成本较高。北方工业大学王捷等人[3]提出一种分布式智能火灾报警系统,以A T89C51单片机为核心,利用智能温度传感器,并配以相关外围接口电路,采用R S485通信协议实现与上位机的数据通信,组成集中和区域为一体的多区域多监测点的火灾报警系统。其在分辨率,稳定性等方面都能够具有一定的水准,使用规模有一定限制。柳小军等人[4]实现了一种基于A R M9多传感器数据融合火灾报警系统,该系统对火灾的判断主要采用模糊推理的数据融合算法,火灾数据的处理和算法的实现都由控制器来完成,实验结果显示,该方法可以提高系统的准确度和可靠性。沈阳仪表科学研究院金晨等人[5]设计了一种基于无线传感网和数据融合技术的火灾报警系统,采用3种传感器组成无线传感网进行火灾数据的监测采集并通过协调器发送给上位机,在上位机程序中采用基于粒子群优化的神经网络算法对传感器数据进行数据融合计算,仿真实验表明传感器数据经过神经网络融合的结果具有较高的准确度。
但现有的火灾探测系统基本都针对小范围,大部分存在检测精度低,成本高的缺陷,且隧道中存在粉尘多、潮气重和风速大等特点,使其存在火灾自动报警设备误报率和漏报率高等问题,因此,本文提出一种基于图像识别分析探测隧道火灾的技术,通过红外、近红外、可见光的多频视频摄像,采集火灾初期的烟雾和火焰图像,提取烟雾和火焰相关物理特性,进行融合计算,形成火灾概率信息并同时输出复合图像信息。能够同时复合检测温度、火焰、烟雾等多种在火灾发生时会产生的物理量,可将视频信息通过网络上传至主控室监控中心,监控人员可实时观察到隧道内的火情,确保在最短的时间对火情进行有效控制和对人员的及时救援。
1 隧道火灾探测系统
近年来,图像型火灾探测报警系统有了长足发展,形成了商业化系统并符合国家和国际的标准规范,在许多领域得到了应用。其最大的优点在于基于成像原理,不需要燃烧产物传播、对流、辐射、传导到探测器的位置,可以实现火灾的早期探测报警。图像型火灾探测报警系统由于可以同时侦测烟雾和火焰,成为最佳的解决方案。
火灾火焰一般具有较为明显的视觉特征:阴燃亮光、火焰颜色、闪烁、外形等特征,另外火灾常常也伴有火灾烟气的生成,火焰和烟气的探测算法不同,市场上的图像火灾探测器可以分为火焰图像探测器、烟气图像探测器,复合式的探测器(两者兼容)。火灾图像探测器通过视频捕捉火灾场景的图像信息,后台利用图像算法提取火灾的物理特征,例如尺寸、运动特性、闪烁、持久度、面积特征、频域特征等,探测器通过算法分析出现在视频图像中的火灾图像特征信息。算法将再针对火灾的多种特征并行进行计算,并根据一定长度的视频周期内符合火灾特征的比例进行统计分析,得出相应火灾特征所对应的指标,将这些指标采用合适的数据融合方式得出火灾的概率。常见的火灾物理特征举例见图1和图2。火灾图像探测器的核心技术是探测算法,一个好的算法具有很低的误报率和漏报率。

图1 火焰探测的部分特征示意图

图2 烟雾探测的部分特征示意图
图像型火灾探测系统(见图3)一般由一到两个CC D/C M O S摄像机、图像采集与预处理单元、D S P处理单元、输入输出界面、红外光源或配套传感器等组成。D S P处理器运行着识别烟雾、火焰的数据算法,并根据计算数值进行融合和决策,最终给出报警信息。

图3 图像探测器系统架构图
本文采用分布式光纤感温探测器作为火灾探测的手段,图像型火灾探测器系统构成见图4,隧道内每隔50m安装一个手动火灾报警按钮,用于手动报警,每隔12.5m部署一个光纤光栅传感器作为火灾探测的辅助手段。在东线入口1 km区域内安装12台图像型火灾探测器,作为一种视频检测型的火灾探测手段。图像型火灾探测器具有感烟功能,每台探测器的监控距离设定为100m,每25m形成一个固定探测分区,可以指导或联动对应分区的灭火设备进行精确定位并给出最合理的灭火方案。
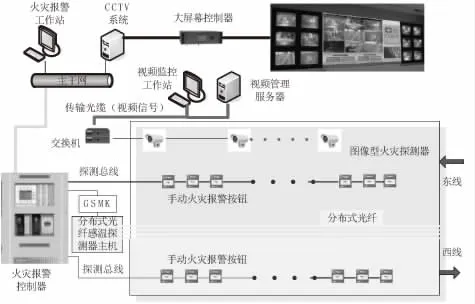
图4 图像型火灾探测器系统架构图
2 识别方法
本文利用红外摄像头获取的图像视频信息,通过计算机处理,利用火焰的各类独特特征对图像进行识别,判断是否是火焰。并以传统的图像目标识别技术为基础,结合火焰的独特性质,主要工作流程分为“背景减除”——“特征分析”——“机器学习”三部分。
2.1 背景减除
背景减除是图像处理的第一步也是最重要的一步,通过有效的背景减除,能大量减少需要进行特征分析的数据内容,实现实时检测算法。常见的背景减除方法有:帧间差分法,平均值累积法,高斯建模法等。
(1)帧间差分法:当视频中存在移动物体的时候,相邻帧之间会有差别,求取两帧图像差的绝对值,则静止的物体在差分图像上的结果应为0,运动的物体在运动边缘处和上一帧相比有变化应为非0。当差分图像绝对值超过一定阈值时,即可判断为运动目标。该方法适用于运动速度适中,运动变化简单的情况。
(2)平均值累积法:在视频中连续取一系列帧,对这些帧取每个像素点的平均值。用这个平均值来表示背景。当出现新帧时,用新帧与背景值做对比。当像素差超过一定阈值时,即可判断为前景物体。这种算法需要一个安静的背景时间做背景建模,对于背景经常变化的场景适用程度低。
(3)高斯建模法:统计一段时间内的某个像素点的信息,通过其概率密度等统计信息(如模式数量、每个模式的均值和标准差)表示背景,利用背景差分思想,判断新输入的像素是否符合高斯背景。这种模型可以对复杂的动态背景进行建模。
为验证背景减除方法的有效性,针对以上不同的背景建模方法,分别进行了相应的实验。试验结果见图5。

图5 不同背景建模方法下的前景图像
2.2 特征分析
利用背景减除算法,可得到仅有运动目标的红外图像,该图像主要由车灯,烟雾,火焰,车辆行人模糊轮廓等组成。火焰的主要独特特征可以分为以下三类:基础几何特征,动态特征,纹理特征。
基础几何特征包括圆形度、矩形度、长宽比、重心高度、边界粗糙度等特征。针对这些特征,我们进行了大量的实验,对共计500张图像进行了特征分析,其中300张图像为火焰图像,200张图像为非火焰图像。各类基础几何特征的识别准确度见表1。
纹理特征是指物体表面的缓慢变化或周期性变化的表面结构组织排列属性,有良好的抗燥能力。经典的纹理特征提取方法包括方向梯度直方图(H O G)方法,局部二值模式(L B P)方法等。
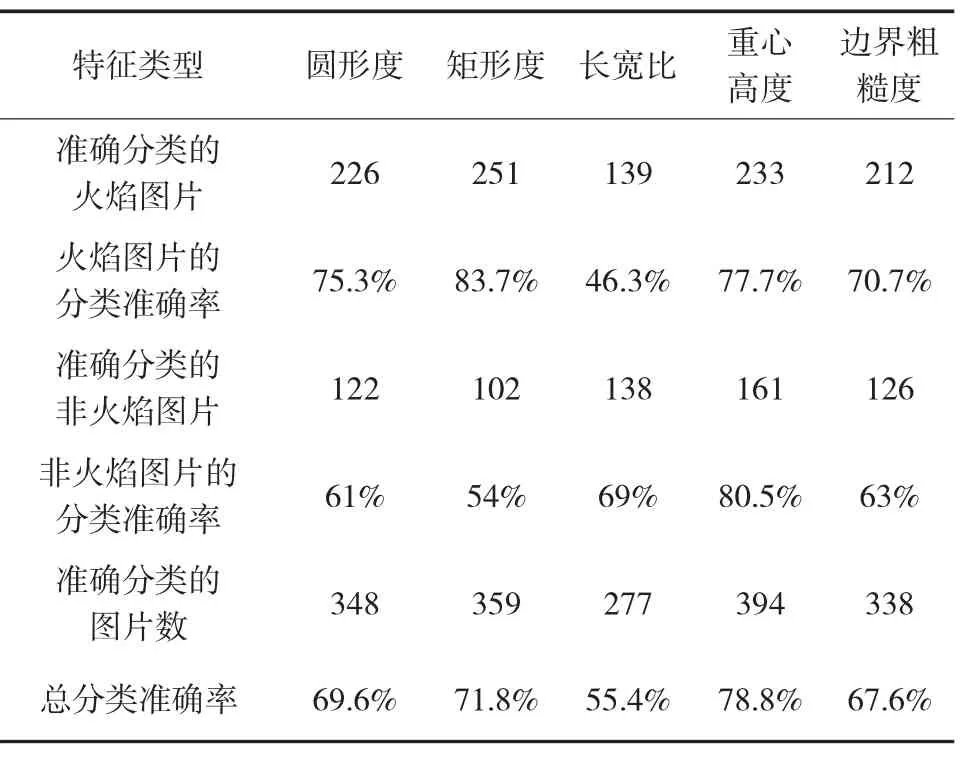
表1 各类基础几何特征对火焰图像的分类准确度
H O G特征通过计算和统计图像局部区域的梯度方向直方图来构成特征。在一幅图像中,局部目标的表象和形状能够被梯度或边缘的方向密度分布很好地描述。在火焰灯光分类中,H O G特征主要描述的是图像的边缘形状属性。火焰的边缘性状和灯光的边缘形状差距较大,能通过H O G特征很好地区分开。
L B P特征是一种描述图像局部纹理特征的算子,将窗口中心像素设为阈值,与相邻的8个像素的灰度值进行比较,根据其与阈值的大小关系设为0和1。这样,将3×3内的8个点与中心点的大小关系进行编码,这就是L B P算子。L B P算子一般不直接用来进行分类识别,因为其对纹理变化和旋转较为敏感。将L B P特征进行直方图统计,利用直方图的不变性进行相似性判断是较为合适的做法。
2.3 机器学习
整理出目标所有的特征后,集合为特征向量,对这些特征向量使用机器学习的方法进行判定。常见的机器学习模型有随机森林,K近邻算法。多层感知机,支持向量机等。利用收集到的数据建立多种模型,并使用A d a B oo s t in g技术对多模型进行融合,可得到一个较为准确的火焰识别模型。利用同分布的测试集,火焰判定的综合准确率约为97%。
3 实验与分析
本项目在大量调研国内外隧道火灾探测报警资料后,结合虹梅南路隧道特点,在原有采用分布式光纤感温探测系统、光栅光纤感温探测系统的基础上,2018年7月在虹梅南路隧道探索基于人工智能技术的图像型火灾探测系统的复合式隧道探测报警技术的应用。并于2018年9月27日夜在业主路政局的大力支持下,组织隧道消防演练验证三类火灾探测器的实际效果。
3.1 实验过程
根据隧道内主要的火灾事故类型,试验方法主要参照了国际一些试验研究的方法,可以较为准确全面地评估火灾探测性能。具体如下:(1)液体油盘火:主要模拟车辆油箱泄漏或者车辆撞击中出现的火灾。这类火灾发展很快,在很短的时间即会达到最高热释放率;(2)烟雾:主要由于车辆碰撞,或者早期阴燃的货物等引发。
因此本次实验设定两种实验科目:
科目一:车辆故障冒烟快速处置。中控室通过道路视频监控发现隧道东线9号摄像头有车辆停留,中控发现后立即通知牵引前往处置,牵引人员到达后,我方在车辆后侧进行点烟(见图6),现场巡查人员立即用现场水带将烟雾扑灭后,再次点烟模拟大巴车着火,现场巡查人员再次利用现场水带将烟雾扑灭。实验现场见图6。

图6 模拟科目一事故阴燃及事故车牵引
科目二:车辆起火运用现场灭火器进行扑灭。中控室通过监控发现隧道东线9号摄像头有车辆停留,我方在车辆后侧进行点火,中控发现后立即启动隧道火灾应急预案,通过广播通知人员组织自救通过逃生通道进行逃生,事故车辆人员从最近的逃生通道撤离,通知巡检、牵引立即赶往现场,巡检到现场后立即使用隧道现有灭火器将火灾扑灭后,再次模拟大巴着火(再次点火),扑灭火灾后,牵引将事故车辆牵离隧道。实验现场见图7和图8。

图7 科目二模拟小车起火与救援
3.2 实验设备

图8 科目二模拟大车起火与救援
实验中所用的工具见表2,通过使用烟雾弹来模拟阴燃状态下的火灾,本实验采用的是瑞典R E G I N公司的#S103系列烟雾弹,发烟时间90 s。采用正庚烷作为燃料,火盘大小为:0.6m×0.6m。实物见图9。

表2 点火工具

图9 模拟烟雾(左)和油盘(右)
对于油盘直径大于0.2 m2的油池,其热释放速率随着直径的增加而增大,其表达式为:

式中:a为有效燃烧因子;G为质量燃烧速率;ΔH为热值;Af为油盘面积。
3.3 结果分析
本次实验分为烟雾和火焰两个科目,每个科目分别模拟大车和小车发生着火或起烟的高度。实验环境现场工况见表3。

表3 试验现场工况
3.3.1隧道烟雾实验
火灾位置设定在图像型火灾探测器的下游50m的位置上模拟阴燃烟雾火灾,使用的烟雾弹可以持续发生90 s时长的白色烟雾。实验结果见表4。
根据表4中数据可知,分布式光纤和光纤光栅不具备烟雾探测功能;图像型火灾探测器可对烟雾做出快速响应,响应时间均在15 s内。并在距图像型火灾探测器50 s位置使用烟雾弹,现场风速大、出烟量小,图像型火灾探测器仍能快速准确的识别报警。所以图像型火灾探测器具备自学习功能,首次点烟探测时间为15 s,末次提升至9 s。
3.3.2 隧道火焰实验
油盘为隧道环境中典型的火灾工况。本次试验中使用0.6m×0.6m的火盘模拟火灾,燃料选用正庚烷。实验结果见表5。
根据表中数据可知,分布式光纤对火焰响应时间在80 s内;光纤光栅对火焰响应时间在40 s内;图像型火灾探测器对火焰响应时间在15 s内。本次点火点在距图像型火灾探测器100 m位置,其仍能快速响应。
综上,通过实验,得出分布式光纤感温探测系统、光栅光纤感温探测系统与基于人工智能技术的图像型火灾探测系统的对比结果,见表6。

表6 对比结果
4 结语
该文提出了一种图像识别技术是一种非接触式的火灾报警技术。应用该技术能够使火灾在前期就被准确发现,能有效提高隧道内火灾识别的响应时间、准确度与效率,能有效减少物资损失、降低人员伤亡、维护社会和谐稳定。该技术在隧道火灾报警体系中起着至关重要的作用。基于人工智能技术的图像型火灾探测手段作为辅助火灾探测系统既可与隧道监控系统结合,也可与隧道异常事件报警系统结合应用于隧道日常监控,具体广泛的应用前景。

表4 隧道烟雾实验结果

表5 隧道火焰实验结果
猜你喜欢
中国交通信息化(2022年5期)2022-07-23
音乐天地(音乐创作版)(2022年1期)2022-04-26
蚕学通讯(2022年1期)2022-04-02
湖南电力(2021年6期)2022-01-04
小学阅读指南·低年级版(2021年3期)2021-03-19
学苑创造·A版(2021年2期)2021-03-11
华人时刊(2019年13期)2019-11-26
动漫星空(兴趣百科)(2019年5期)2019-05-11
当代陕西(2017年12期)2018-01-19
学与玩(2017年6期)2017-02-16
