
基于电子准星补偿的电磁发射系统设计*
2019-07-30 03:42倪晓明田杨萌向红军
弹箭与制导学报 2019年1期
倪晓明,田杨萌,向红军
(1 北京信息科技大学, 北京 100192; 2 陆军工程大学石家庄校区, 石家庄 050003)
0 引言
电磁发射器( EM launcher)就是利用电磁力提升和推动弹体的器械,电磁发射器具有无明火、无污染、非接触、噪音小、推力大、速度可控等明显优势,在公安、国防等领域应用前景广阔[1-3]。目前的瞄准系统基本采用机械瞄准或光学瞄准,需根据距离进行手工调整或补偿,本设计采用了电子自动补偿方式,根据测得的距离,确定加速级数,自动计算初速度并对准星进行修正补偿,避免了手工调整,提高了瞄准和射击的精度及速度。设计系统主要由观瞄系统、测距系统、火控系统及准星修正系统等几部分构成,其中观瞄系统通过CCD/CMOS摄像头实现对打击目标的观察、记录和初步瞄准;测距系统通过激光测距、测角部件对目标进行测距、测角;火控系统根据实测距离和角度以及所需的出膛速度计算出驱动级数,调整电磁火力;准星修正系统修正虚拟准星位置,实现目标的精确瞄准。
1 系统架构
文中设计方案由电子观瞄成像模块、激光测距模块、角度测量模块、图像处理模块、弹道计算和准星补偿修正模块、影像显示和记录模块、弹速调整模块等组成,基于电子准星补偿的电磁发射系统的结构图如图1所示。

图1 基于电子准星补偿的电磁发射系统结构图
2 系统软硬件实现
2.1 激光测距模块
主要实现目标距离的测量,即从弹体出膛点到被瞄准点的连接线距离。根据这一距离配合倾斜角度可以确定弹体出膛速度和弹道轨迹。
激光测距一般有两种方式:相位法和脉冲法。相位式激光测距一般应用在精密测距中,精度高,一般为毫米级。但测量速度较慢,距离有限,一般为百米级。脉冲法测量距离的精度一般在±1 m左右,但测距范围很大,可轻松超过千米[4]。因本次设计对测距精度要求不高,米级精度足够,但对快速测量要求较高,因此设计选择脉冲测距法。
激光测距模块发射出的激光经被测量物体的反射后被测距模块接收,测距模块记录激光往返的时间。光速和往返时间的乘积的一半就是测距模块和被测量物体之间的距离。从激光发射点到目标点间距离D可用式(1)表示。
D=ct/2
(1)
式中:D为从激光发射点到目标点间距离;c为光在大气中传播的速度;t为光往返激光发射点和目标点一次所需的时间。
2.2 倾角测量模块
主要实现对枪身俯仰角度的测量,配合测距模块所测距离值确定弹体出膛速度和弹道轨迹。该模块设计的核心芯片采用了AD公司的ADXL345数字式超低功耗三轴加速度计芯片。该芯片分辨率高(13位),数字输出数据为16位二进制补码格式,可通过SPI或I2C总线进行数据传输。ADXL345是一款完整的三轴加速度测量系统,既能测量运动或冲击导致的动态加速度,也能测量静止加速度,倾角测量就是利用静止加速度测量实现的。ADXL345加速度信号的幅度和极性关系如图2所示,ADXL345输出响应与芯片放置位置的关系如图3所示[5]。

图2 ADXL345加速度信号的幅度和极性关系

图3 ADXL345输出响应与芯片放置位置关系
加速度传感器测得的加速度并不能直接表示物体的倾角,需要通过计算才能得到倾角值。传感器平行安装在电磁发射器上,X轴与发射器出弹筒平行,Y轴横向与出弹筒垂直,Z轴与出弹筒纵向垂直,设出弹筒与地面的夹角为俯仰角ρ,枪身的侧滚角为γ。
当ρ=0,γ=0时,各轴上的静态加速度为:Ax=0g;Ay=0g;Az=1g
当ρ≠0,γ=0时,各轴上的静态加速度为:Ax=1g×sinρ;Ay= 0g;Az= 1g×cosρ
由上式可得到俯仰角ρ的计算公式:
ρ=arctan(Ax/Az)
(2)
同理可得到滚角为γ的计算公式:
师:在建立函数与方程的联系过程中,实现了“动” 与“静”的转化——“方程的根是一个静态的点,等价转化为“函数的零点”就与运动变化联系上了.
γ= arctan(Ay/Az)
(3)
主控芯片通过SPI接口读取ADXL345传感器的三轴加速度后,根据上述公式,可计算出发射器的俯仰角、侧滚角数据[6]。
加速度传感器的硬件连接如图4所示。
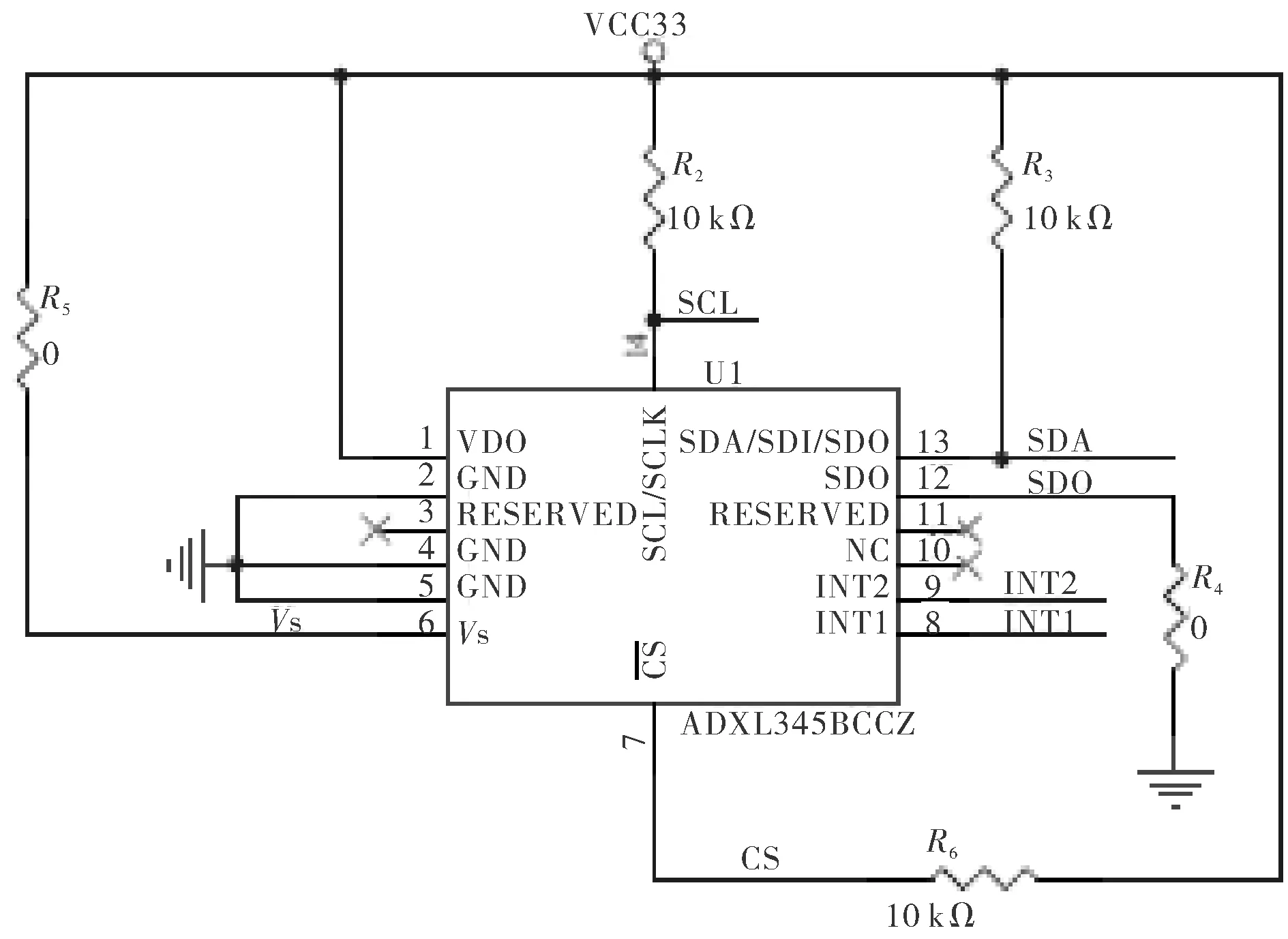
图4 加速度传感器的硬件连接
2.3 弹体速度计算/弹道计算/准星补偿修正计算模块(十字瞄准叉丝补偿计算)
该模块的关键是准星的补偿修正计算。
1)根据激光测距模块所测距离及火控策略首先确定电磁驱动级数,距离越远驱动级数越多,随后把分级使能信号命令发送给电磁驱动模块,调整电磁火力,改变弹体出膛速度。
2)根据驱动级数和弹体质量等参数计算出弹体出膛速度。
3)弹道和飞行时间计算。根据激光测距模块所测距离S和倾角测量模块所测俯仰角ρ,可计算出发射器出弹口和目标之间的距离S,进一步可计算出水平距离S水平和垂直距离S垂直,如式(4)、式(5)所示。
S水平=S·cosρ
(4)
S垂直=S·sinρ
(5)
弹道曲线的基本公式如式(4)所示。
(6)
式中:S为距离;v为弹丸初速;a为加速度,等于重力加速度g和空气阻力加速度a′(v)的矢量和;t为时间。
4)计算修正俯仰角Δρ。
根据式(7),距离S,时间t,可进一步计算出修正俯仰角Δρ。
(7)
5)确定单位像素视角。本设计选用300万像素CMOS摄像头,焦距为10 mm,视场角为12°,显示屏分辨率为1024像素×768像素,可计算得出在不放大时单位像素视角f=0.011 7°。
6)根据计算出的修正俯仰角Δρ和单位像素视角f,可计算出准星的修正像素值ΔP=Δρ/f,即十字瞄准线在瞄准屏幕上的补偿位置,以便射击者手动调整发射器的瞄准角度,达到瞄准射击目的。
本部分完全利用软件编程实现,代码运行于主控芯片,用以控制电磁驱动模块的驱动级数和LCD准星显示模块的十字瞄准叉丝补偿。
2.4 弹体速度控制驱动模块
电磁加速器可通过调整加速级数或电磁力矩来实现弹体出膛速度的调整。本设计采用了7级电磁加速器,每级由一个加速线圈、一个储能电容、一个大功率可控硅和一套可控硅触发驱动系统组成,电磁加速器结构如图5所示。可控硅触发驱动系统各级基本相同,分为使能部分、触发部分、驱动部分和测速反馈部分。上一级的反馈信号作为本级的触发信号,第一级永久使能,其它级可选通使用,用来控制加速级数。第一级没有使能信号,触发信号直接启动发射信号。

图5 电磁加速器结构图
弹体速度控制驱动模块首先根据弹体速度计算模块确定的出膛力度和速度,给出不同的加速使能级数,调整电磁火力,最后驱动电磁发射部分,实现弹体的不同加速要求。
2.5 图像处理及影像显示记录系统
该模块完成视频图像的处理、准星的叠加、距离等数据的叠加显示、视频录像等功能。设计硬件基于一款开源的ARM开发板“香橙派+”,它可以运行Android4.4、Ubuntu、Debian等操作系统,体积小巧,使用全志H3的Cortex-A7四核ARM处理器,拥有2 GB DDR3 内存,板载16 GB EMMC Flash存储器,具有可扩展的TF卡/ MMC卡插槽,视频输入支持具有CSI接口的摄像头模块,视频输出支持 HDMI和 CVBS双输出,完全满足本模块的需求。
本设计操作系统基于Android4.4系统,软件基于Android SDK和JDK软件包,采用Java语言面向对象编程。电子观瞄采用了具有自动对焦功能的摄像头,软件上调用了系统提供的照相机程序android.hardware.Camera类进行实现,视频录制使用了MediaRecorder类进行实现,准星的叠加显示、距离等数据的叠加显示使用了andriod.graphics类实现。
操作界面底图为照相机的预览画面,然后在画面上叠加显示十字瞄准叉丝,目标距离、倾角、火力等数据,同时根据目标距离、倾角、修正辅助瞄准点,用于实际瞄准。操作显示界面如图6所示。
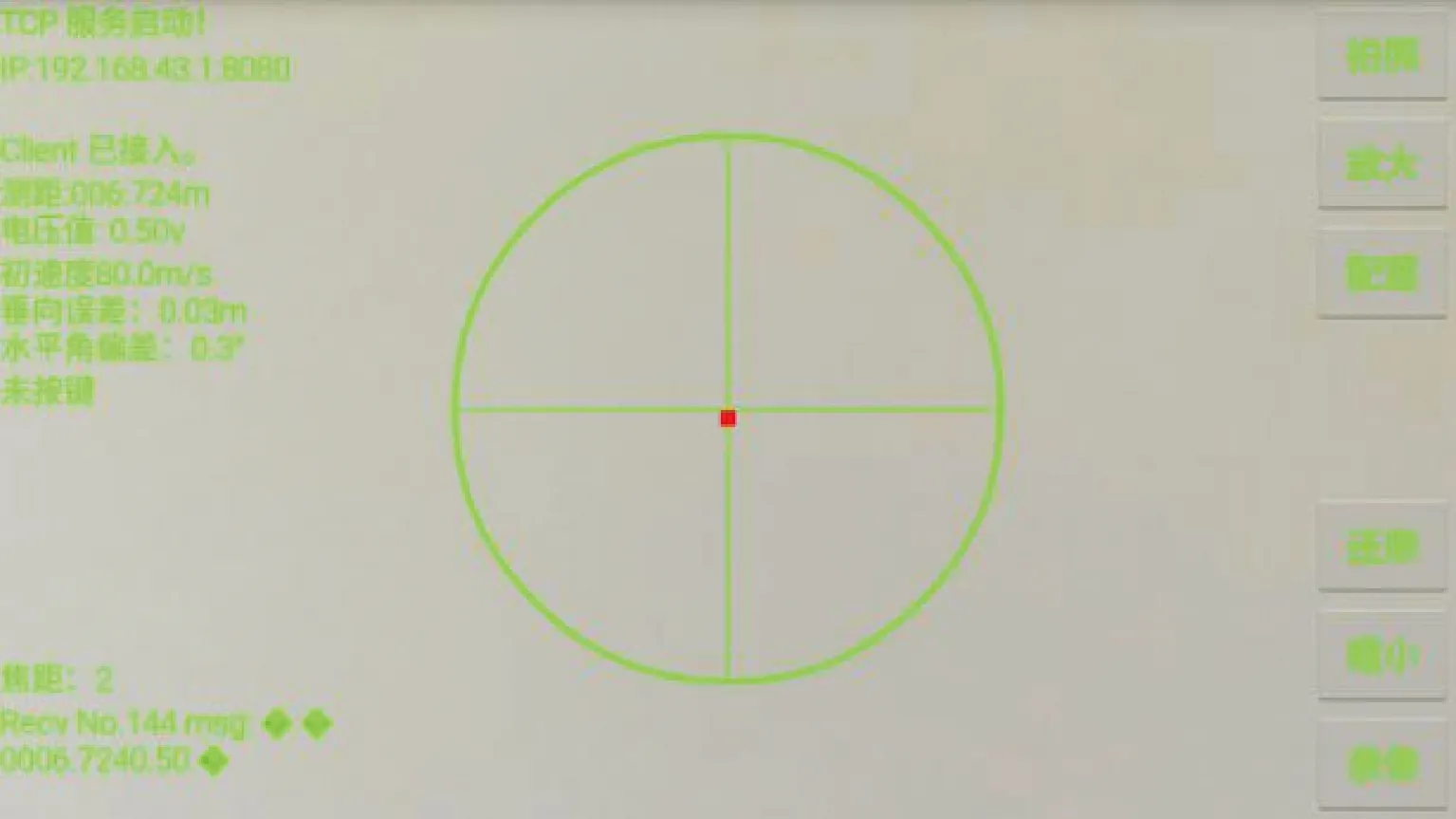
图6 操作显示界面
2.6 键控操作控制模块
整个发射器的键控部分采用组合按键控制方式,可实现带半按瞄准功能的两步式扳机、镜头变焦控制、火力手自动调整、照相、录像等功能。
3 验证及结论
基于以上方案进行了样机制作,并在军械工程学院进行了测试和验证,测试数据如表1所示。
以上数据表明,本次设计的基于电子准星补偿的电磁发射系统实现了预定功能,在距离测量精度、补偿修正精度、瞄准误差方面基本满足设计要求。研究取得了初步的成果,但距离实际应用和定型还有一定的差距,有待对机械部分及整机结构进行工业设计,对硬件电路及软件代码做进一步的优化裁减。
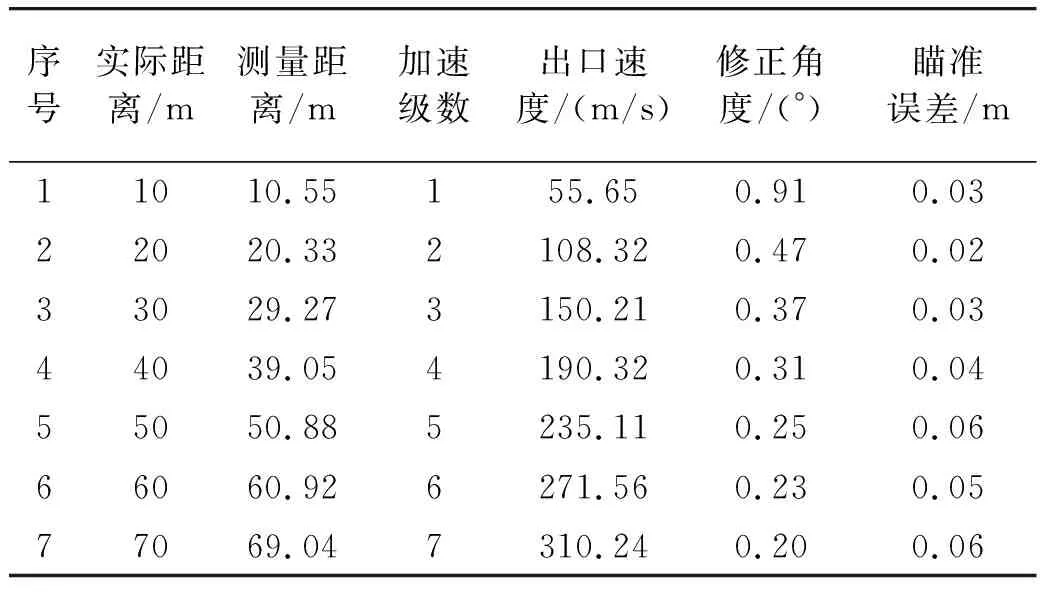
表1 系统测试数据
猜你喜欢
导航定位学报(2022年4期)2022-08-15
兵器装备工程学报(2022年7期)2022-08-10
兵器装备工程学报(2022年4期)2022-05-09
爆炸与冲击(2022年2期)2022-03-17
资源信息与工程(2021年5期)2022-01-15
兵工学报(2021年6期)2021-07-29
雷达学报(2021年2期)2021-05-12
军民两用技术与产品(2021年9期)2021-03-09
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
电子制作(2019年24期)2019-02-23
