
基于特征点采样和曲线拟合的道路坡度计算方法
2019-08-07 06:19王宇王淼
汽车实用技术 2019年14期
王宇,王淼
基于特征点采样和曲线拟合的道路坡度计算方法
王宇1,王淼2
(1.北京交通大学机械与电子控制工程学院,北京 100044;2.中交公路规划设计院有限公司,北京 100088)
为了得到更精确的道路坡度值,文章提出了一种基于特征点采样和曲线拟合的道路坡度计算方法。该方法对待测量坡度的道路进行路段划分,对每个路段的样本点进行拟合,生成待测量坡度的道路的拟合曲线并划分网格。将每个网格内样本点的坡度均值作为网格坡度值,最后确定每个网格的坡度方向。本处理方法使得汽车的控制系统能够获得整条道路每个位置上的坡度值,继而可以将这条道路的坡度值进行后续的存储和应用。
道路坡度;特征点采样;曲线拟合
引言
现今汽车制造商越来越重视汽车的节能以及安全性能,对于这二者来说,车辆行驶速度、行驶道路上的坡度变化以及交通状况等因素都能对其造成很大的影响。而其中道路坡度是影响车辆行驶安全及其电控系统准确控制的重要参数。另外,随着智能汽车的发展,对智能汽车的控制算法非常依赖于所获得的道路坡度数据的精度。因此,获得一条道路完整的坡度数据对于汽车的控制非常重要。在网联的环境条件下,获得一条道路的坡度数据后,可以将此数据存放在云端服务器上,当其他车辆进入此区域时,可以把道路坡度等道路参数及时下发给车辆,便于驾驶员根据道路参数做出以能耗、通行效率等为优化目标的驾驶决策。
目前,对于道路坡度数据的采集,有以下三种方法[1-4],一是利用水箱或钟摆等仪器直接读取倾斜角作为道路的坡度角。受到行驶车速、仪器安装位置等制约,此种方法测试精度较差。二是在试验车辆上安装陀螺仪、传感器、加速度计等仪器来采集道路坡度值。传感器能实时输出汽车的俯仰角,试验时将传感器放置在汽车质心位置,在汽车不发生俯仰,即汽车匀速行驶或缓慢行驶时,车身几乎不发生俯仰运动,可以认为汽车的俯仰角度近似等于道路的坡度。在郊区、山路或在高速公路上,匀速工况比例较大,用这种方法测量道路坡度就有很大的可行性。单轴倾角传感器可以被用来测量道路坡度。三是基于滑行阻力对道路坡度进行估计。基于滑行阻力的方法主要是通过滑行试验标定出滚动阻力、空气阻力和传动系阻力系数,然后根据汽车行驶方程式和坡度阻力定义求得坡度的大小。
汪旭明、孟妮等[5-6]对以上三种方法分别进行了研究,分析结果表明,基于GPS设备和传感器的方法准确度较高,基于坡度阻力的方法误差较大。但是,对于利用传感器采集道路坡度的方法,由于汽车在道路行驶过程中路况不同,使得汽车匀速行驶的比例不同,如在市区内行驶,汽车保持匀速几乎很难做到,所以这种方法适用场景很有限。为了解决因汽车难以保持匀速而带来的测量不准问题,本文通过在试验车辆上安装陀螺仪和GPS设备采集数据,并运用特征点采样和曲线拟合的方法处理数据,获得了一条道路上连续的坡度值。测量方法流程如图1所示。

图1 基于特征点采样和曲线拟合的测量方法流程图
1 采集样本点
本文选取中国福建省厦门市的一段公路作为测量对象。

图2 试验车辆行驶轨迹图
驾驶装有陀螺仪以及GPS设备的试验车辆行驶在待测量坡度的道路上,按照固定的频次采集道路数据(采集频次通常为每0.5秒-5秒采集一次,间隔时间越短,精度越高),每一条数据包括GPS坐标、坡度值和坡度符号(+1代表上坡,-1代表下坡)。试验车辆在待测量坡度的道路上重复行驶多次,行驶次数根据待测量道路宽度而定,最终使得试验车辆驶过的轨迹覆盖整条道路,并将采集到的每一条数据中的GPS坐标记为一个样本点。
2 路段划分
2.1 形成行驶轨迹图
利用上一步中采集到的样本点,组成待测量坡度道路上的试验车辆行驶轨迹图,如图2中粗线所示。图2中粗线实质上为很多个点,每一个点代表一个样本点,因为样本点很多而且很密,因此最后从视觉上变成了一条粗线。利用该行驶轨迹图表示待测量坡度的道路路线。
2.2 路段划分
使用基于百度地图开发的页面手工标记工具对试验车辆行驶轨迹图进行划分,完成对待测量坡度的道路路段划分,并用编号依次标记每一个路段,每一个路段的形状接近一条直线或者二次抛物线,且每个路段的长度大约在2公里左右(最长不大于4公里,最短不小于0.1公里),以保证之后对该路段进行曲线拟合的准确性。路段划分示意图如图3所示。

图3 路段划分示意图
再去掉采集数据有问题的部分,最终所需要测量道路坡度的道路的路段划分示意图如图4所示。

图4 最终路段划分示意图
3 曲线拟合及网格划分
3.1 曲线拟合
对上一步划分得到的每个路段,使用属于该路段的样本点进行从1次到4次逐次拟合,生成该路段的拟合曲线,最高进行4次多项式拟合:若拟合的坐标值与实际样本点的坐标值相关系数大于0.98,则拟合终止,得到的曲线即为该路段的拟合曲线;否则选取相关系数最大时的多项式为最优拟合多项式,该最优拟合多项式对应的曲线即为该路段的拟合曲线。某路段的曲线拟合如图5所示,图5中黑色的点为样本点,即试验车辆采集的GPS坐标,黑色曲线为样本点坐标拟合生成的曲线。
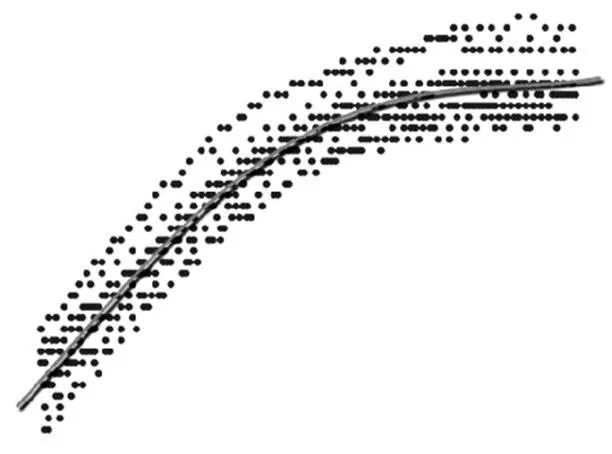
图5 某路段曲线拟合示意图
为了便于曲线拟合的计算,对每个路段中每个样本点的经纬度进行如表1所示的变换,表中经度实际值和纬度实际值分别使用车载GPS设备所采集到的汽车在每个样本点时的实际的经纬度,而由于实际的经纬度之间的差距较小,因此需要将经纬度之间的差距放大以方便计算,表中经度、纬度分别代表变换后的值。
表1 经纬度变换公式表

然后针对变换后的经纬度数据,使用四次多项式曲线拟合,每个路段的拟合公式如下:
纬度=a+b*经度+c*经度^2+d*经度^3+e*经度^4
式中,经度、纬度含义与表1中经度、纬度含义相同,代表经过变换后的经纬度值。a、b、c、d、e分别代表拟合公式中经度不同次项的系数。
每个路段拟合公式的系数如表2所示。
3.2 网格划分
对于上一步得到的每一个路段的拟合曲线,根据地图中的位置,按照从西到东从南到北的原则,依次画出与拟合曲线垂直的线段。每两条线段之间间隔10-30米,两个相邻的线段即组成一个网格,按生成网格的顺序对网格进行ID编号,划分结果如图6、图7所示。
表2 每个路段拟合公式系数表


图7 网格划分整体示意图
4 计算坡度值及方向
4.1 计算网格坡度值

图8 绝对值平均坡度值示意图
把所有有坡度值的样本点划分到对应网格中后,计算每个网格内的样本点的绝对值平均坡度值;当网格内样本点个数小于10时,坡度值为90,代表该网格坡度值未知。整条道路的绝对值平均坡度值如图8所示。
4.2 确定坡度方向
根据前面采集到的数据,确定每个网格中坡度的方向是上坡还是下坡,具体做法如下:

图9 道路坡度曲线示意图
根据车辆经过网格的先后顺序、网格ID编号的顺序及实时采集的坡度符号+1或-1向所在网格的符号变量计数:如果车辆经过的顺序与网格ID编号增加的顺序一致,则将采集到的坡度符号直接累加到网格符号变量上,否则将采集到的坡度符号的负值累加到符号变量上。最终的网格符号变量累加值的符号代表该网格的坡度符号,从而确定该网格坡度的方向。如果网格的坡度符号为+,则代表从该网格到相邻的下一个网格是上坡;如果网格的坡度符号为-,则代表从该网格到相邻的下一个网格是下坡;如果网格的坡度符号为0,则代表不能确定网格坡度符号,即无法确定该网格的坡度方向。如果出现网格坡度符号为0,则需要根据该网格附近两个网格的坡度符号进行修改,例如出现+0+或者-0-则修改为+++或者---,但如果出现两个连续的网格坡度符号为0或出现+0-及-0+情况,则需要对该网格坡度进行重新测量。
每个网格的坡度方向确定后,整条待测道路的坡度曲线如图9所示。
5 结论
通过把陀螺仪和GPS设备安装在试验车辆上,采集包括GPS坐标、坡度值和坡度符号在内的道路数据。车辆在一条道路上行驶多次,就能够获得各个位置的道路数据。本文创造性地将采集到的道路数据在网格内进行处理,能够得到较为精确的道路坡度曲线,便于后续的存储和应用。由于一些原因,本文并没有考虑一个网格内部的坡度值有正负变化的情况,有兴趣的学者可以在这方面继续研究。
[1] 李远方.重型车质量辨识及道路坡度状态估计方法研究[D].吉林大学, 2012.
[2] 王建强,俞倩雯,李升波,等.基于道路坡度实时信息的经济车速优化方法[J].汽车安全与节能学报, 2014,5(3):257-262.
[3] 杨志刚,曹长修,苏玉刚.道路坡度识别方法的技术实现[J].重庆交通大学学报(自然科学版),2002,21(3):112-115.
[4] 钱立军.自动变速器控制的道路坡度计算方法研究[J].拖拉机与农用运输车,2004(6):5-7.
[5] 汪旭明.道路坡度测试方法试验研究[J].农业装备与车辆工程, 2015,53(2):6-11.
[6] 孟妮,韩丹.基于CAN接口的道路坡度采集系统设计[J].公路与汽运,2012(2):66-69.
A Road Slope Data Processing Method Based on Feature Point Sampling and Curve Fitting
Wang Yu1, Wang Miao2
( 1.School of Mechanical, Electronic and Control Engineering, Beijing Jiaotong University, Beijing 100044;2.CCCC Highway Consultants Co., Ltd., Beijing 100088 )
This paper proposes a road slope data processing method based on feature point sampling and curve fitting. First, we collect data for the road to be measured, and obtains sample points. The sample points are used to compose the track map of the test vehicle, and then the road segments on the track map are divided. We fit the sample points of each road segment, generate the curve of the road to be measured and divide girds. The average slope of the sample points in each grid is considered as the grid slope value. Last, the slope direction of each grid is determined. In this paper, the vehicle control system can obtain accurate road slope value at each position of the whole road by processing the collected data, and then the slope value of this road can be stored and applied in the future. This paper also provides a basis for future research.
Road slope; Feature point sampling; Curve fitting
U463.6
A
1671-7988(2019)14-131-04
U463.6
A
1671-7988(2019)14-131-04
王宇(1993-),男,河北保定人,硕士研究生,就读于北京交通大学机械与电子控制工程学院,研究方向为智能网联汽车。
10.16638/j.cnki.1671-7988.2019.14.043
猜你喜欢
中国交通信息化(2022年7期)2022-10-27
汽车电器(2022年6期)2022-07-02
北京交通大学学报(2021年4期)2021-09-26
现代计算机(2020年31期)2020-12-28
考试与评价·高二版(2020年4期)2020-09-10
汽车与驾驶维修(维修版)(2020年4期)2020-07-06
福建基础教育研究(2020年3期)2020-05-28
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
价值工程(2017年31期)2018-01-17
