
面向智能交通系统的仿真路网快速建模方法
2019-08-08 08:11毛天露
图学学报 2019年3期
石 敏,孙 科,,毛天露,郑 玲
面向智能交通系统的仿真路网快速建模方法
石 敏1,孙 科1,2,毛天露2,郑 玲1
(1. 华北电力大学控制与计算机工程学院,北京 102206;2.中国科学院计算技术研究所,北京 100190)
提出了一种面向智能交通系统的仿真路网模型,与传统路网模型相比,增强了几何表达和拓扑表达能力,同时其上可附着丰富的交通属性数据,能够满足精细化智能交通仿真的需求。在此基础上,研究了一种路网数据迁移方法,从现有电子地图快速提取并构建面向智能交通系统的道路路网。通过对几何精确性、拓扑完备性和建模高效性的测试表明,该路网模型及其建模方法,提高了交通仿真基础路网建模的效率,降低了建模成本,为智能交通仿真的广泛应用提供了高效、可靠的道路数据来源。
智能交通系统;路网建模;电子地图;数据迁移
交通仿真作为智能交通系统(intelligent transportation system)应用的重要分析和评估手段,已广泛应用于城市道路规划、交通理论研究、交通管理方案评价、交通控制优化配时等诸多方面[1-6]。交通路网数据是智能交通仿真的基础,仿真车辆通过识别路网数据中的几何、属性和拓扑等信息,完成沿车道行进、换道、通过路口等等一系列的时序运动仿真。交通仿真中的路网数据,是对现实道路路网的数学抽象与规范化描述,是可被计算机识别的虚拟道路网络。智能交通仿真路网如图1所示。
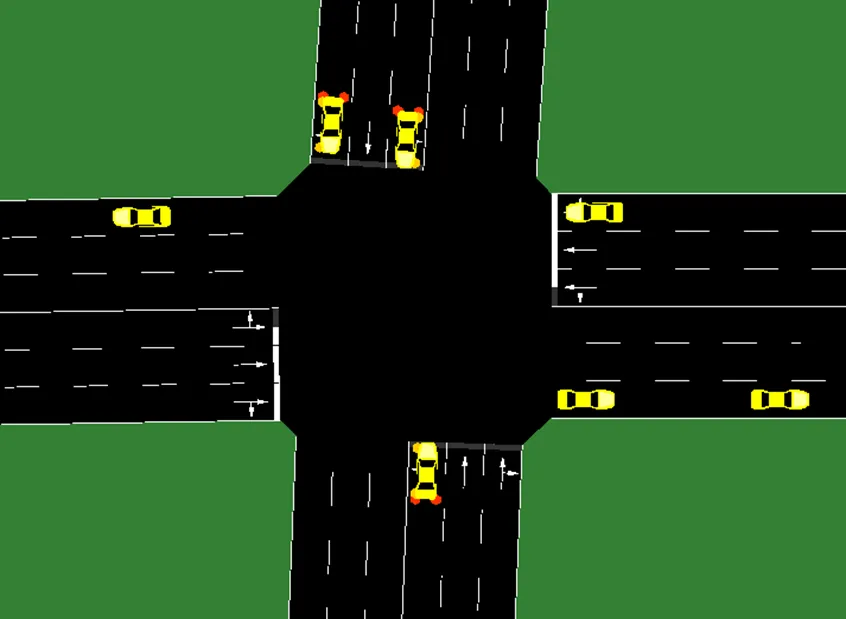
图1 智能交通仿真路网示意图
构建仿真路网也是智能交通仿真中最为耗时的部分,因为仿真路网的构造涉及2个关键问题:①仿真路网应具备一定的精确度,能够反映出真实路网的几何形态[7-8];②仿真路网应该充分表达路网的拓扑规则。目前大部分的交通仿真系统侧重于复杂的仿真功能的实现,仅提供简单的路网建模工具,且使用起来比较麻烦,需要以节点和路段为基本操作单位,逐点逐段地进行编辑,缺乏对大规模路网几何及复杂拓扑关系快速建模能力[9],导致建立大型仿真路网效率低下。文献[10]提出了从AutoCAD地图提取路网几何和拓扑信息,进而生成仿真基础路网的方法,一定程度上提高了建模速度,且生成的路网与原地图几何精度一致,但其本质依旧是纯手工编辑,时间效率堪忧。文献[11]提出了一种从电子地图生成Paramics仿真路网地图的方法,能够快速建立Paramics仿真路网,但适配性、通用性欠佳,无法满足其他仿真软件的需求。
近些年来,各种电子地图软件、服务层出不穷,电子地图产业链及应用已经比较成熟。国外代表性的如GoogleMap、OpenStreetMap、Tele Atlas和Zenrin。国内代表性的有四维图新、高德地图、百度地图等。电子地图基础路网数据具有相当高的精确度,能够为车辆、行人等提供准确的导航信息。基于此,为进一步提高智能交通仿真中基础路网数据建模的效率,同时考虑现有丰富的电子地图资源,本文提出一种数据迁移方法,可实现电子地图路网到智能交通仿真路网的快速迁移。首先,分析了电子地图路网和仿真路网的共性和差异,提出一种通用的仿真路网结构定义,然后借助现有电子地图资源,快速地交互式建立仿真路网的几何信息,全自动的建立路网拓扑信息,实现从电子地图路网数据到仿真路网的快速转换。最后,在仿真软件SUMO上的试验结果表明,此方法能够实现仿真路网快速、精确地生成。
1 仿真路网的几何与拓扑定义
1.1 电子地图路网数据与仿真路网数据比较
电子地图中的路网和交通仿真路网都能承载仿真车辆在其上运动,两者的路网基础元素有一定的重合,主要差别在于对路网几何和拓扑信息描述的细致程度不同。因此通过分析2种路网所含有的共性与差异,可以清晰得出电子地图路网数据到智能交通仿真路网数据的转换关系。
电子地图按照图层来组织地图的特征数据,每个图层包含了整个地图的不同方面,多个图层叠加在一起形成了一幅包括方方面面的整幅地图。地图中路网数据存储在路网图层中,电子地图路网的基础组成元素是:路段节点(Node)和路段(Link)。路段是单侧车行道的集合,路段节点是路段中交通组织发生变化处的断点。路段和路段节点相互连接构成了整个路网。电子地图路网如图2所示。
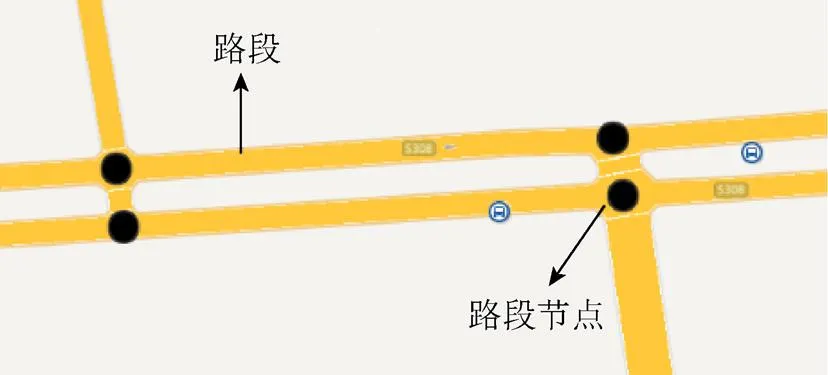
图2 电子地图路网实例
交通仿真路网主体依旧采用路段(Link)和路段节点(Node)结构表示,并且其路段和路段节点与电子地图中的路段和路段节点含义一致。但在几何表达上,其路段增加了几何坐标点和车道(Lane)描述:几何坐标点是路段的形状点,对于非直线路段几何坐标点可以更细致的反映路段的弯曲度;增加车道信息可以更好地描述路段交通属性、路段连接以及路段形状。在拓扑表达上,采用连接器(Connection)描述路段与路段之间、车道与车道之间的连通转向关系。路网数据以xml树的形式分别存储在相关文件中。交通仿真路网如图3所示。
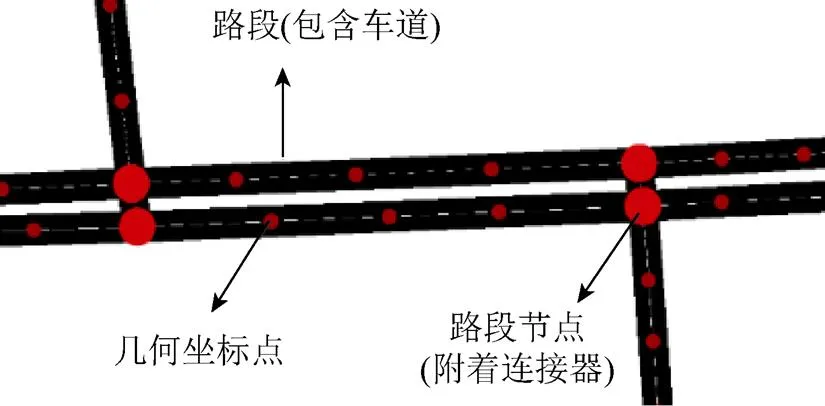
图3 仿真路网实例
由图3可知,交通仿真路网应该能够反映出真实路网的几何形态,主要体现在路网中路段的光滑度、所含车道数等信息的细致表达;另一方面,仿真路网应该充分表达路网拓扑规则,包括路段、车道之间的连接转向关系。电子地图中路网的基本元素包含于交通仿真路网中,可以转换成仿真路网的基础及其有利条件,但其几何信息描述较为粗糙,未涉及到车道级的描述;并且缺乏对路网细致拓扑信息的有效表达,难以直接应用于仿真基础路网。电子地图路网与交通仿真路网基础元素对比如图4所示,图中蓝色圆圈代表电子地图路网基础元素集合,绿色圆圈代表交通仿真路网基础元素集合。
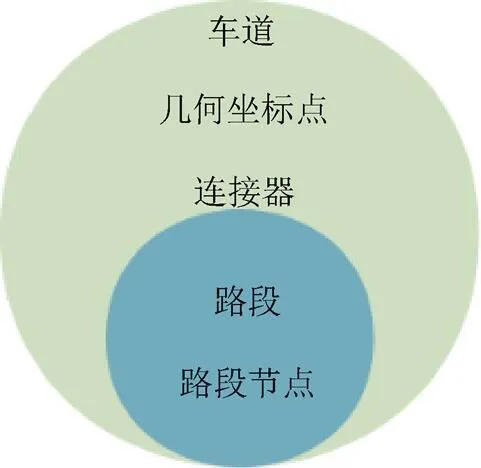
图4 电子地图路网与仿真路网基础元素关系图
本文通过扩展电子地图路网结构来重新定义出一种适用于交通仿真的基础路网结构,以承接电子地图路网数据与各交通仿真系统路网数据的转换。在此基础上,利用几何信息交互式生成技术以及道路拓扑信息自动化生成技术,快速构建满足交通仿真需求的路网。
1.2 智能仿真路网定义
电子地图路网采用的Node-Link模型简洁、紧凑,应用范围广泛。但由于其表示过于简单,信息表达不充分,因此无法有效描述交通属性信息。此外,其可移植性也较差。本文采用改进的Node-Link数据模型来描述交通仿真路网,增强了其转向表达和几何表达能力的同时确保其向上和向下的兼容性,满足交通仿真的需求。
路网的拓扑结构以及道路单元属性可由图5所示的UML图表示。图中可见物理拓扑Node和Link构成了仿真路网的“骨架”,为路网提供在空间上的延展方向。
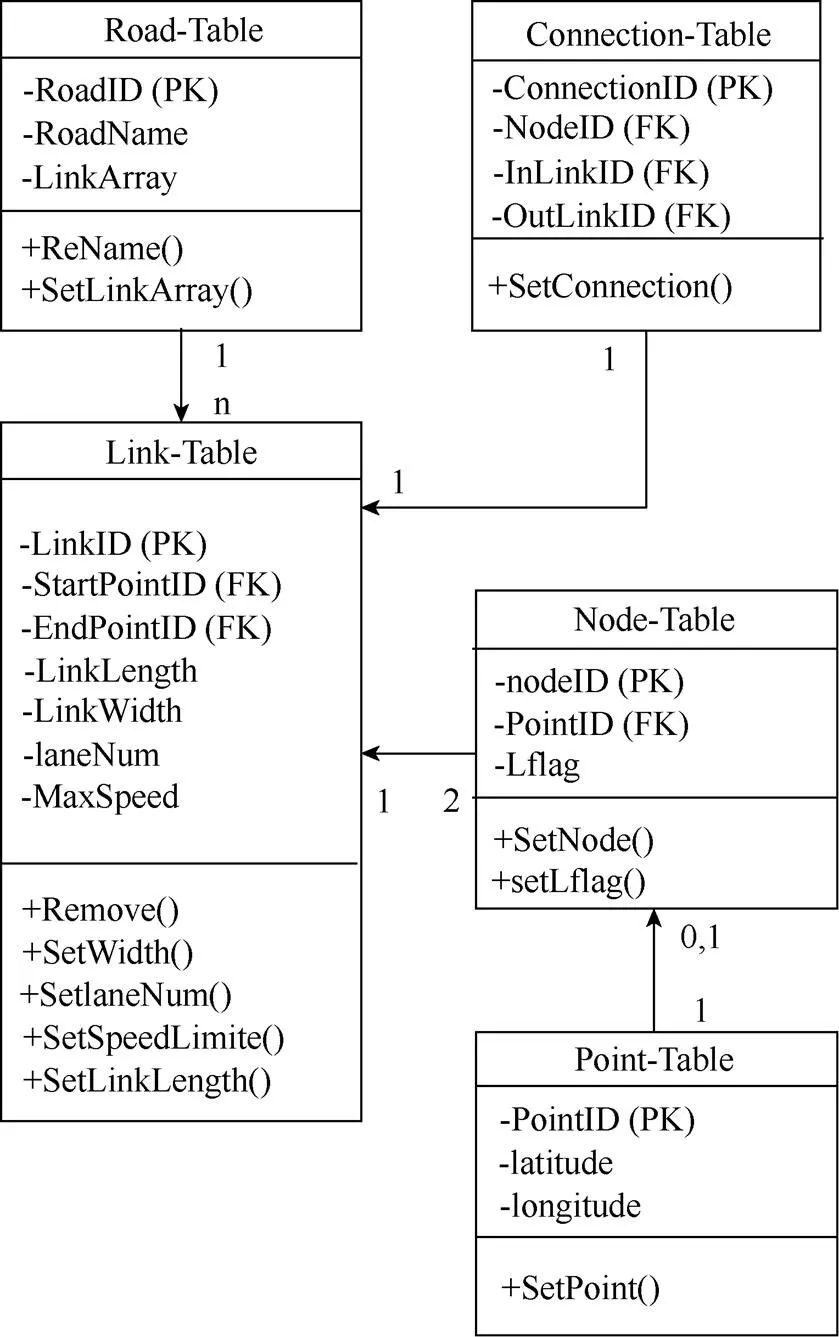
图5 仿真路网设计UML图
2 基于数据迁移的仿真路网快速建模
电子地图路网与仿真路网都含有路段和路段节点信息可以直接进行迁移,有利于整体路网的快速建模。但是仿真路网需要的几何坐标点、车道、转向拓扑等信息,需要通过算法获取或者通过用户输入进行赋值。为了满足精确和快速的路网建模要求,设计了交互式拾取路口点、设置路段车道数量并且自动获取路段中的几何特征点的方法;针对电子地图缺乏路网拓扑信息的有效表述,设计相关算法自动获取。由电子地图路网数据到交通仿真路网之间数据迁移的框架如图6所示。
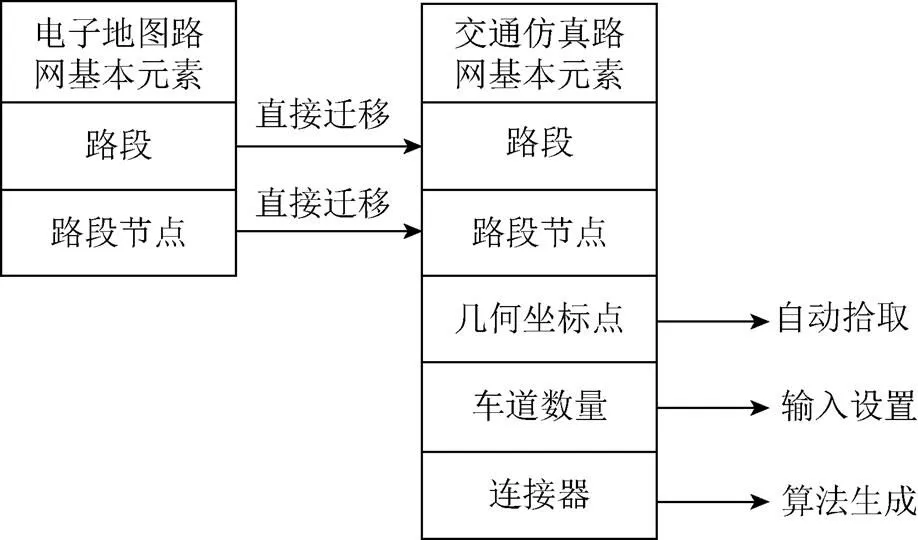
图6 两种路网数据迁移框架
2.1 提取路网几何数据
几何数据包括路段节点、路段、几何坐标点,三者之间的关系如图7所示。路网中描述这些点、线的关键信息就是其坐标位置和有序对排列。通过在线电子地图提供的接口,在各路段节点处打点并利用导航接口自动获取当前路段包含的首末节点和其内几何坐标点,可快速生成、拾取路网中点的位置数据;将其按照顺序排列,便可快速获得路网中的路段几何线数据。在路网生成过程中,每完成一条完整道路中的点和线数据拾取,就将数据按顺序存入数据库的Point、Node、Link、Road表,循环完成整个路网中所有道路的点、线信息拾取,就可建立起整个路网的几何数据。

图7 路网几何关系图
在打点过程中,需要注意到可能因为人工打点误差导致不能准确点击同一个路段节点,所以本系统设计了吸附工具,在打点时总是在当前位置周围框定一个经纬度范围:假设当前打点的经纬度位置为、,则框定的范围表示为

系统遍历已经打过的每个路段节点的经纬度信息(logi,latj),如果存在某个路段节点的经纬度满足(logi,latj)∈W,就令(x,y)=(logi,latj)。实现路段节点坐标纠偏的同时维持端点在数据库中的唯一性,既减少了数据库存储的点数量,又提高了整个系统的可维护性,为以后的增删改查操作提供了方便。几何数据提取流程图如图8所示。
2.2 提取路网拓扑数据
路网拓扑数据全自动生成。依靠电子地图提供的车辆导航功能,循环遍历Node表中的每一个路段节点,并依次遍历与每一个节点相连的Link,确定当前节点的进入路段(InLink)和离开路段(OutLink),之后取出数据库中InLink和OutLink所分别对应的Link长度和,定义从InLink的起始节点(StartPointID)到OutLink的末尾节点(EndPointID)并且途径当前Node的路线总长度为,然后利用地图车辆导航接口将取出,如果满足

其中,各变量长度单位为“m”,可将此转向关系存储到数据库中的Connection表中。拓扑数据提取流程图如图9所示。
2.3 设置属性数据
在建立仿真路网的过程中,一些附着于道路、路段上的属性信息可以直接设置和修改,而不必后期在仿真软件中单独查询相关元素逐个进行补全,加快了仿真路网的生成效率。这些信息包括:路段所含车道数、道路名称、路段长度、当前路段是否禁行、当前Node节点是否有红绿灯控制等。
2.4 坐标转换
一方面,由于各种电子地图采用经纬度标识坐标点,但研究者采用的坐标系却不尽相同,导致相同的路口点在不同的电子地图中显示的经纬度位置有较大偏移,且偏移位置不规则;另一方面,交通仿真软件在建模、展示路网时都采用直角坐标系。因此需将以不同地理坐标系下经纬度表示的原始坐标点集转换成投影坐标点集,也就是从基于不同坐标系的地理坐标到投影坐标的转换。并且由于系统在计算路段长度时对距离精度的要求较高,所以对于投影坐标系的选择也提出了相应的要求。
本系统采用的方法是首先将所有的电子地图的坐标点统一转换到WGS-84坐标系下表示, 再利用投影技术将地理坐标映射到改良版的墨卡托直角坐标系—UTM坐标系下,完成坐标转换。传统的墨卡托投影(Mercator)将地球投影到一个圆柱上,地球切着圆柱的切线圆就是赤道线。该投影的结果是最接近赤道的地方,变形就越小,离赤道越远,变形就越大,导致在远离赤道的区域计算路段距离因投影偏差被放大,造成距离计算不准确。横轴墨卡托投影(universal transverse mercator,UTM),是把传统墨卡托投影的圆柱作旋转,使圆柱切着地球的子午线(经度线)。结果还是接近切线圆的地方相对的没有变形,但是通过转动这个圆柱,每隔6°转一次,使其与不同的子午线相切,就产生了60个不同的带,每个带中的区域变形比一致,在计算路段距离时不会因所在区域的不同而出现大的投影偏差。
2.5 将路网信息写入数据库
本文使用5个表分别存储路网中的所有节点(Point)、路段节点(Node)、路段(Link)、路段之间的转向连接关系(Connection)和道路数据(Road),其结构见表1~5。表1存放路网中所有的节点经纬度信息,包括路段节点和路段几何坐标点,表中所示3个字段分别表示节点编号、节点经度、节点纬度。表2存储所有的路段节点信息,表中所示3个字段分别表示路段节点编号、当前路段节点在表1中对应节点的编号、当前路段节点是否有红绿灯标识。表3存储路段相关信息,表中所示4个字段分别表示路段编号、路段起始节点对应在表2中的编号、路段终止节点对应在表2中的编号、路段包含的所有几何坐标点。表3中还存储附着在Link上的路段属性信息,如:路段所含车道数、路段长度、路段是否可通行等。表4存储所有的路段转向连接信息,其中四个字段分别表示转向编号、当前转向信息对应的路段节点编号、进入此路口点的Link编号、离开此路口点的Link编号。表5存储所有的道路信息,其中3个字段分别表示道路编号、道路名称、组成当前道路的所有路段。
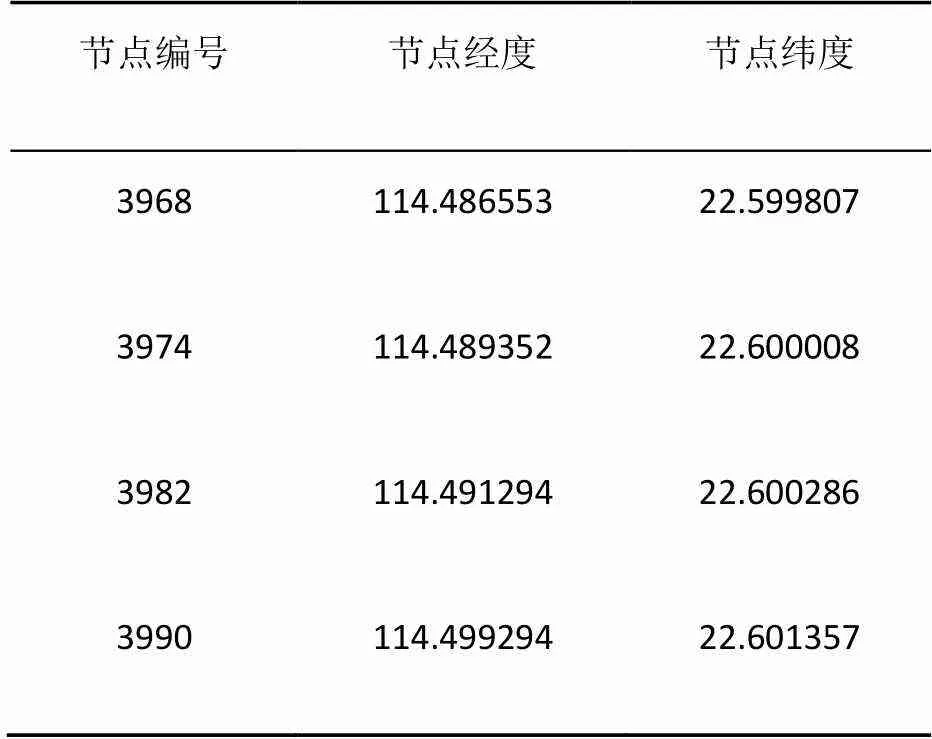
表1 Point表数据结构
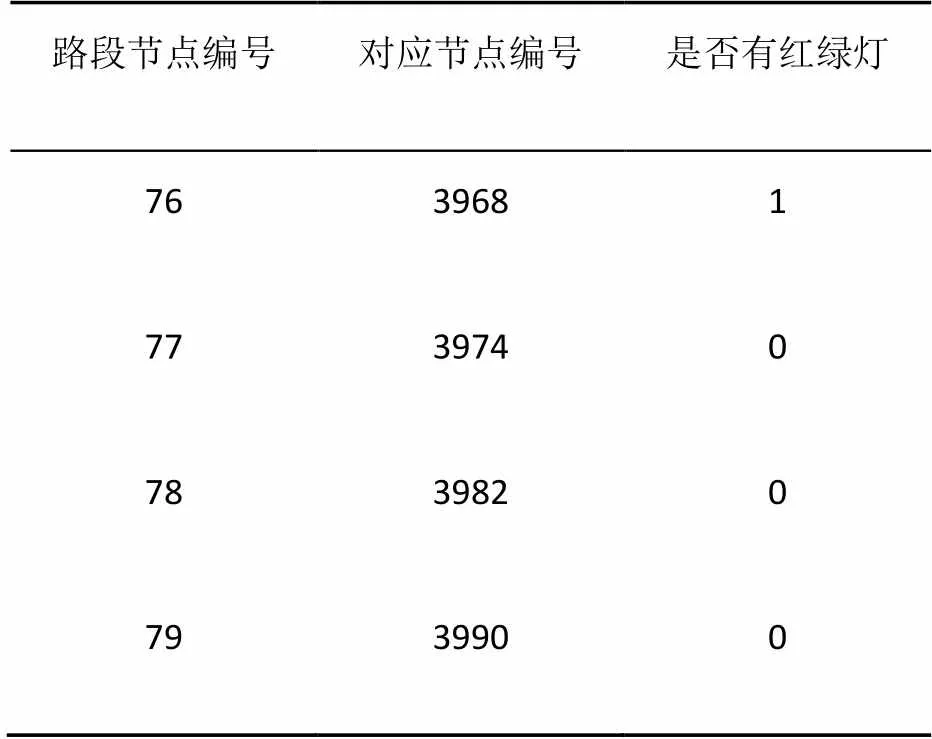
表2 Node表数据结构

表3 Link表数据结构
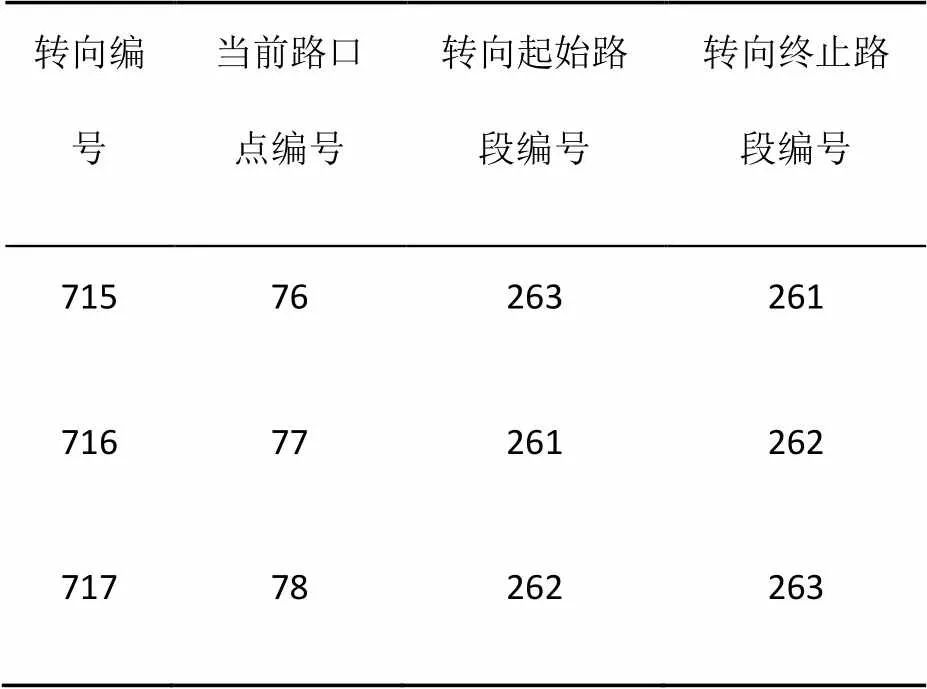
表4 Connection表数据结构
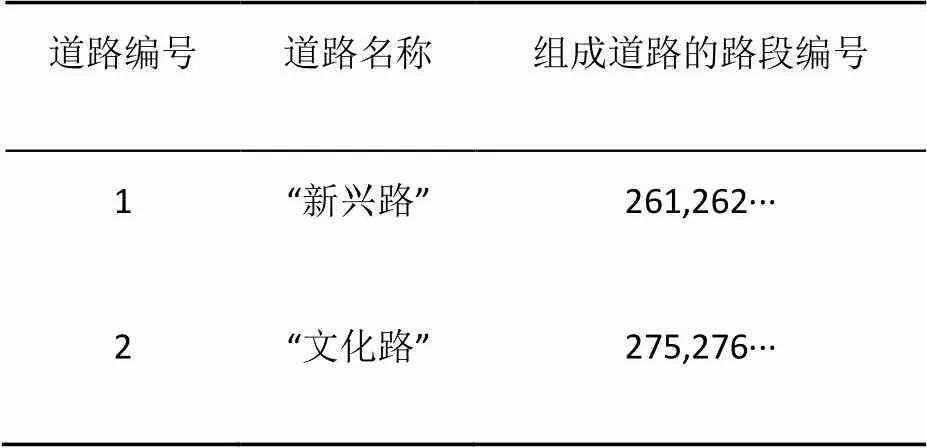
表5 Road表数据结构
2.6 从通用仿真路网生成不同的仿真基础路网
以上已经生成了通用仿真路网的几何和拓扑数据库,只要把数据库的内容按照1.1节提到的路网数据结构,并根据不同仿真软件对各路网基础元素存储格式的要求分别对应写入不同仿真软件的路网文件,就可以生成不同的交通仿真基础路网。基于此基础路网,智能交通仿真软件就可以在路网加载交通流和其他交通元素进行仿真,并根据仿真的各种需要对路网进行更加细致的建模,比如停车缓冲区长度,车辆禁行信息等。
3 实例分析
3.1 复杂交通区域建模和仿真
根据第2节所述的路网数据转换实现方法,本文首先选取了3种较复杂的交通区域进行建模,包括环岛、立交桥、城市复杂路口,并将建模结果导入Sumo仿真软件中进行仿真实验,3种交通区域建模效果见表6,在其上进行的交通仿真效果如图10~12所示。
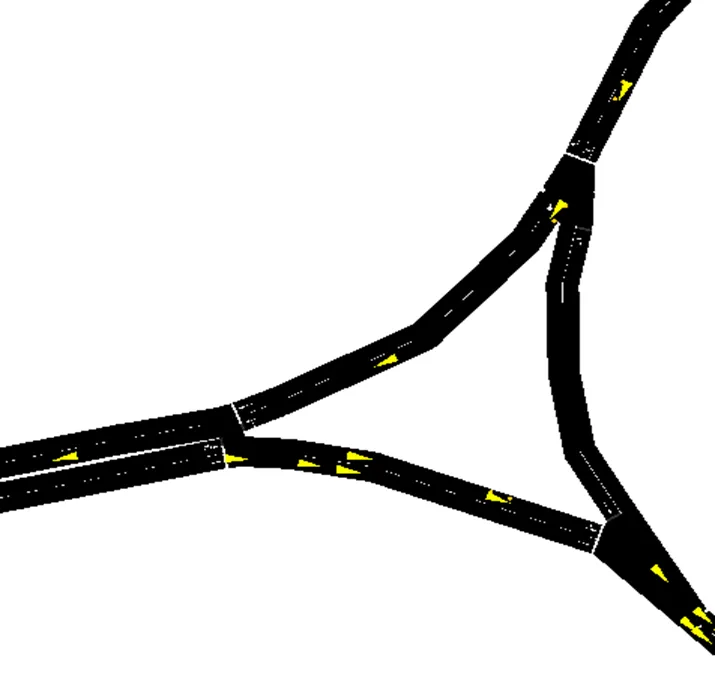
图10 环岛内部分区域仿真结果图

图11 立交桥内部分区域仿真结果图

图12 特殊路口内仿真结果图
3.2 深圳大亚湾大鹏新区10 km范围内路网建模
使用本文方法对深圳市大亚湾大鹏新区周围10 km的路网(图13)进行建模,并将结果导入仿真软件SUMO中进行展示。建模效果如图14所示。

图13 电子地图中大鹏新区10 km范围路网
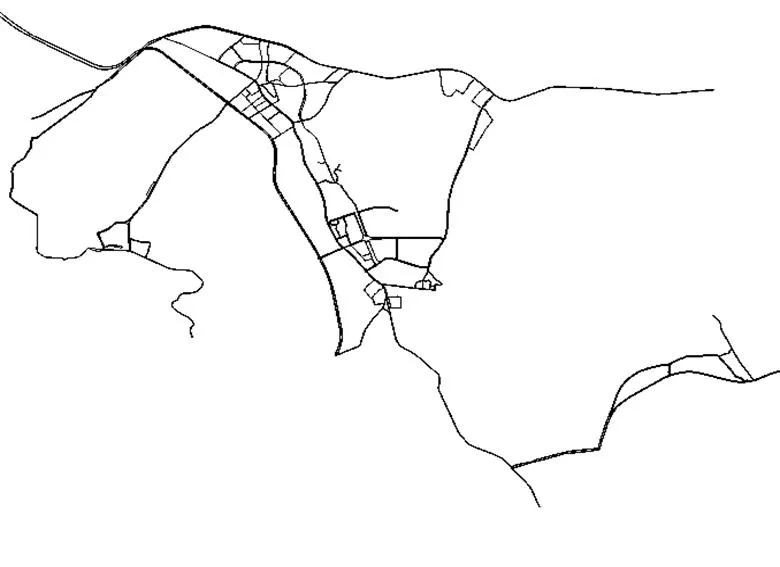
图14 SUMO中大鹏新区10 km范围路网
3.3 传统路网建模方法和本文方法建模耗时对比
目前为止主流的建模方法依旧是根据各种仿真软件提供的建模工具逐点逐段的进行路网几何建立,并纯手工建立路网中路段之间的拓扑转向关系。因此本文将使用仿真软件提供的建模工具进行路网建模的方法称为传统的路网建模方法。
使用传统建模方法和本文方法,分别对复杂交通区域(即3.1节仿真实例中图示的3种复杂交通区域:环岛、立交桥、复杂路口)与大鹏新区周围10 km范围路网(即3.2节仿真实例中图示的深圳市大亚湾大鹏新区周围10 km的路网)建模所耗时间进行比较,结果见表7。

表7 传统方法和本文方法路网建模效率对比
为充分说明本文方法在仿真路网建模效率方面的优势,同时考虑到仿真软件SUMO支持从开源地图—OpenStreetMap中直接导入路网,使用本文所提路网建模方法和从OpenStreetMap中直接导入路网法,分别对上文中环岛、立交桥、复杂路口和大鹏新区周围10 km范围路网进行建模并比较所耗时间,结果见表8。
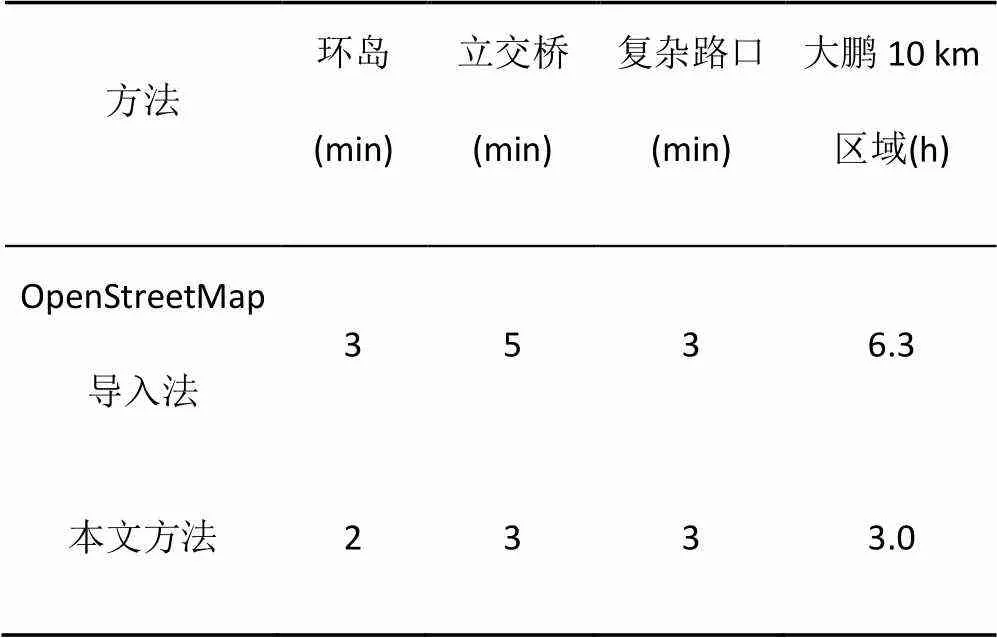
表8 OpenStreetMap导入法和本文方法路网建模效率对比
从3.1节的实验结果可知:本文方法可以对路网中的特殊区域进行精确建模,生成的路网具有完备的几何、拓扑信息,能够作为交通仿真路网使用,且具有对于大规模路网的建模能力。本节首先对传统手工制作路网的方法和本文提出的基于数据迁移方法所耗时间进行对比,可以发现对于环岛、立交桥、复杂路口等复杂交通区域,使用本文方法可有效提高建模速度,节省建模时间;对于大范围的路网,由于大部分路段或路口几何形状和拓扑信息较简单,并且得益于本文方法中大量的自动化技术的应用,本文方法同样可以显著的提高大范围路网建模的效率。另外,还对从OpenStreetMap中直接导入路网法和本文方法进行路网建模时间效率对比,从效率对比(表8)可以看出,对于某些局部区域路网(如环岛、立交桥、复杂路口等),本文方法和从OpenStreetMap中直接导入路网法建模效率差距不明显,因为从OpenStreetMap中可以直接导入路网的几何数据,用户只需完善少量的路网拓扑信息即可,因此,建模时间效率较高;但是对于大规模路网,因为拓扑信息量大,手工填补路网拓扑信息耗时严重,并且手工填补过程极易出错,导致路网建模效率下降严重,与本文方法差距明显。表8中给出的时间数据是在实验中得到的,具体时间可能根据不同使用者对2种建模工具操作熟练程度而有微小差异。但总体上,本文方法大幅提高了路网建模效率,实现了仿真路网快速、精确建模。
4 结 论
本文提出了一种交通仿真路网快速建模方法,利用数据迁移技术,实现仿真路网数据从电子地图快速获取。此方法可以交互式、快速地获取电子地图中路网的几何数据,全自动获取路网拓扑数据,并严格按照仿真路网数据表达格式和存储特点进行基础仿真路网文件构建。经多实例验证,此方法提高了路网建模的效率,生成的路网与原地图一致,并可作为基础路网加载交通元素进行交通仿真以及进行更加精细的路网建模,满足了交通仿真的要求。
[1] 陈荣波. 智能交通系统理论的研究与实现[D]. 长春: 吉林大学, 2004.
[2] ZHAO X, LI Y, XU S S, et al. Modeling a modern tram system integrated with a road traffic simulation [J]. Simulation, 2018, 94(1): 77-90.
[3] UGNENKO E, UZHVIEVA E, VORONOVA Y. Simulation of traffic flows on the road network of urban area [J]. Procedia Engineering, 2016, 134: 153-156.
[4] LI G L, FENG L, LIU J. Research on urban road network traffic simulation model [C]//14th COTA International Conference of Transportation Professionals. New York: IEEE Press, 2014: 2072-2076.
[5] WANG J, LAWSON G, SHEN Y Z. Automatic high-fidelity 3D road network modeling based on 2D GIS data [J]. Advances in Engineering Software, 2014, 76: 86-98.
[6] YANG L Q, ZONG G, LIU Y H. Using O-D estimation in dynamic road network traffic flow simulation [C]//2014 IEEE/ACIS 13th International Conference on Computer and Information Science (ICIS). New York: IEEE Press, 2014: 441-447.
[7] MAO T L, WANG H, DENG Z G, et al. An efficient lane model for complex traffic simulation [J]. Computer Animation and Virtual Worlds, 2015, 26(3-4): 397-403.
[8] HELBING D, HENNECKE A, SHVETSOV V, et al. Micro- and macro-simulation of freeway traffic [J]. Mathematical and Computer Modelling, 2002, 35(5-6): 517-547.
[9] 毛天露, 王华, 康星辰, 等. 复杂路网内大规模车辆运动的仿真[J]. 计算机学报, 2017, 40(11): 2466-2477.
[10] 宋阳阳. 基于CAD图的VISSIM路网自动生成方法的研究[D]. 北京:北京工业大学, 2010.
[11] 聂佩林, 余志, 何兆成. 基于MapInfo电子地图的Paramics仿真基础路网构建[J]. 系统仿真学报, 2008, 20(1): 214-217.
[12] 黄敏, 饶明雷, 李敏. 面向仿真的车道级基础路网模型及其应用[J]. 系统仿真学报, 2014, 26(3): 657-661, 681.
A Rapid Method of Road Network Modeling for Intelligent Transportation Systems
SHI Min1, SUN Ke1,2, MAO Tian-lu2, ZHENG Ling1
(1. School of Control and Computer Engineering, North China Electric Power University, Beijing 102206, China; 2. Institute of Computer Technology Chinese Academy of Sciences, Beijing 100190, China)
A simulation road network model for intelligent transportation system has been proposed. Compared with the traditional road network model, this model enhances the geometric expression and topological expression ability. At the same time, it can attach rich traffic attribute data to meet the refined needs of intelligent traffic simulation. On this basis, a road network data migration method is studied, which quickly extracts and constructs a road network for intelligent transportation systems from existing electronic maps. Tests on geometric accuracy, topological completeness and modeling efficiency show that the road network model and its modeling method improve the efficiency of traffic simulation basic road network modeling, reduce the modeling cost, and provide an efficient and reliable road data source for the wide application of intelligent traffic simulation.
intelligent transportation system; road network modeling; electronic map; data migration
TP 391
10.11996/JG.j.2095-302X.2019030489
A
2095-302X(2019)03-0489-08
2018-11-15;
2018-12-02
国家重点研发计划项目(2016YFC0802500,2017YFC0804900);装备预研重点基金科学基金项目(19140A15030115DZ08042);国家自然科学基金项目(61300131)
石 敏(1975-),女,山西大同人,副教授,博士,硕士生导师。主要研究方向为虚拟现实、服装动画等。E-mail:shi_min@ncepu.edu.cn
毛天露(1977-),女,浙江舟山人,副研究员,博士,硕士生导师。主要研究方向为智能人机交互、虚拟现实等。E-mail:ltm@ict.ac.cn
猜你喜欢
铁道通信信号(2020年10期)2020-02-07
读与写·教育教学版(2019年12期)2019-12-31
中国交通信息化(2019年9期)2019-11-16
建材发展导向(2019年11期)2019-08-24
中国交通信息化(2019年12期)2019-08-13
中国交通信息化(2018年4期)2018-08-21
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
环球飞行(2018年7期)2018-06-27
中国公路(2017年11期)2017-07-31
