小型电动汽车自动巡航控制研究
2019-08-19 07:30张健
时代汽车 2019年10期
张健
长城汽车股份有限公司技术中心 河北省汽车工程技术研究中心 河北省保定市 071000
1 小型电动汽车自动巡航控制基本原理
1.1 自动巡航控制系统基本结构
当驾驶员松开加速踏板时,自动巡航控制系统会保持所设定的速度行驶,汽车定速巡航控制系统主要是控制汽车的速度按照驾驶员设定的速度行驶。电子控制单元(ECU)有四个输入信号和一个输出信号。驾驶员通过人机交互界面(HMI)设定的期望巡航车速信号、车载速度传感器实时采集的汽车实时车速信号、发动机节气门传感器采集的节气门位置信号和其它测量状态传感器采集的车辆状态信号。输出信号为节气门电控执行机构的控制脉冲信号。
1.2 自动巡航控制机理
当汽车驾驶员设定好巡航车速时,就可以不用踩加速踏板从而使汽车保持一定的车速。如果长时间驾驶车辆,采用这种装置,就可以减少不必要的车速变化,节约燃油消耗量。
定速巡航控制系统主要通过接收车传感器所采集到的实时信号,与所设定的巡航车速进行对比分析,将结果输入到电机控制中,通过调节电机转矩从而改变速度,达到所设定的巡航车速。
1.3 自动巡航控制系统功能
当驾驶员驾驶车辆行驶在道路上时,如果周围没有其他车辆,就可以设置一个巡航车速,此功能可以自动驾驶车辆匀速行驶,减轻驾驶员的疲劳强度。如果驾驶员在车辆行驶过程中加速,则可以按加速按钮使车速逐渐升高,直到达到合适的速度即可。同样的道理,当驾驶员想减速的时候,就可以按下减速按钮,达到自己想要的车速。当驾驶员踩下制动踏板时,自动巡航控制系统将会取消,在设定好巡航车速后,踩下加速油门车辆会加速行驶,松开油门车速会慢慢恢复到所设定的巡航车速。
2 小型电动汽车自动巡航系统控制器设计
PID控制是应用最早的控制方法,他的操作简单,不需要复杂的模型以及易于理解,因此成为了使用最多的控制器,PID控制由三部分组成,分别为比例单元(P)、积分单元(I)、微分单元(D)。
1)比例系数P会影响系统的稳态误差、响应速度以及调节的精度[1]。增大P,可以提高系统的调节精度和响应速度。但是P过大会出现超调情况,有的时候会导致系统失去稳定。同样的道理,减少P,系统的调节精度和响应速度将会降低,影响系统的控制效果,不能满足实际要求。
2)积分系数I会影响系统的稳态误差。增大I,能够短时间的消除系统的静态误差,如果I太大会产生积分饱和的现象,系统会出现很大的超调现象。相反,如果太小的I,就不容易消除误差,也就无法实现理想的控制效果。
3)微分系数D会影响系统的动态特性,增大D,系统超调量也会减小,但稳定性会提高。如果D过大,会使控制强度提前降低,增加调节的时间,抗干扰能力也会降低;相反,如果D较小,会降低控制效果。
PID控制算法的公式如下所示。

传统的PID控制不能满足精度高,响应时间快等要求高的地方,实际工业生产中,具有相当大的不确定性,不能达到理想的控制效果,原因在于传统PID控制中比例系数、积分系数以及微分系数是固定不变的,不能根据具体的情况做出及时的调整,所以要想达到更好地控制效果是非常困难的。控制器设计是巡航控制系统的主要部分,要想达到理想的仿真结果,必须选择正确的控制理论。由于传统的PID控制无法达到控制效果,所以本文采用模糊理论的方法来控制。模糊控制理论具有运算简单,可靠性高等优点,适合应用到汽车控制器设计中。
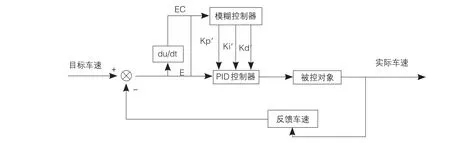
图1 模糊控制器原理

图2 模糊控制仿真模型
2.1 模糊控制基本原理
如图1所示,将速度差值和加速度作为输入量,变成控制器能够识别的语言。该模糊语言经过模糊控制规则,得到输出量,对该输出量进行去模糊化处理,就可以得到比例参数调整系数Kp’,积分参数调整系数Ki’和微分参数调整系数Kd’。然后将他们传给PID控制器,通过控制系统分析,作用在被控对象上,从而调整汽车的速度。
模糊控制大致分为五个步骤:
1)定义变量
电机控制过程中,速度误差和加速度以及这两个变量得出的U都叫做模糊变量;
r-目标输入量;
y-控制系统输出量;
E-误差;
EC-误差E的变化率。
2)模糊化
模糊化就是将变量转换到论域,然后根据一定的方法得出隶属度[2];
3)知识库
知识库包括两个部分,一个是规则库,主要功能是描述控制策略和控制目标,另一个是数据库,它的主要功能是处理一些模糊数据。
4)逻辑判断
根据从知识库得到的信息,通过模糊逻辑以及推论的方法进行分析从而得到模糊控制信号。
5)反模糊化
通过反顺序进行推理,将推论值反向推理得到控制信号,即为模糊系统的输出值,也可以作为后面一个系统的输入值信号。
2.2 模糊控制器算法设计
2.2.1 建立模糊规则
控制规则是模糊控制器的核心。通过对许多人的分析研究,进行总结,得到模糊控制的规则。在规则建立之前,需要考虑超调量,反应时间等众多问题。根据选取的输入变量和输出变量的模糊子集,建立控制规则[3]。模糊控制规则对PID参数进行自整定,实现定速巡航的模糊控制。
2.2.2 模糊控制器仿真模型的建立
使用Simulink搭建模块,搭建模糊控制模型,将设定车速与实际车速的差值和加速度作为输入量,输出电机转矩。对三个参数进行调整。建立如图2所示的仿真模型。量化因子
3 小型电动汽车自动巡航控制仿真
3.1 基于Carsim与SimuIink联合仿真平台建立
本文的控制算法是在Matlab/Simulink的环境下设计的,Carsim是一款比较成熟的软件,与Matlab/Simulink具有良好的接口,这两种软件相互结合,联合仿真,具有较高的可行性和正确性[4]。
将车辆动力学模型、电机模型以及模糊控制器模型进行连接,连接完成之后就形成了完整的仿真模型。
其中给电机设置一个初始电压,通过输出转矩作用在汽车模型上,控制汽车的行驶速度,然后设置巡航车速,将巡航车速与实际车速的差值作为控制器的输入变量,通过模糊控制器的计算处理,输出电压反馈到电机控制模型中,进而对速度进行调整,联合仿真模型组成一个闭环控制,可以不断的对车速进行调整,达到所设定的巡航车速。通过添加示波器,可以更好地观察控制过程中各个参数的变化以及控制的效果。
3.2 仿真结果分析
通过观察不同的情况下,电动汽车巡航控制系统的速度变化,可以发现设置的巡航车速越大,所要达到的时间越长,车速的误差保持在范围内,无论在哪种环境下,车辆的速度都能达到驾驶员所设定的车速,模糊控制理论控制效果比较好,精度高,能够满足巡航控制的基本要求。
4 结论
本文针对电动汽车定速巡航控制系统的研究,不仅满足了广大驾驶员的需求,同时减少了环境污染问题和能源浪费等一系列问题。通过对仿真结果的分析,得出重要结论。
其中设计首先通过对传动系统的分析,改变了以往内燃机的传动控制,通过使用轮毂电机控制输出转矩,不仅减少了环境污染,还对汽车的性能进行了优化设计,适应了汽车发展的趋势。其次对模糊控制理论的分析与研究,得出合适的模糊控制的控制规则与算法。
自动巡航控制系统是目前比较先进的控制方法,他可以使驾驶员感到更加轻松,更加舒适,提高了行车安全性。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年7期)2022-04-20
汽车实用技术(2022年4期)2022-03-07
汽车实用技术(2022年3期)2022-02-23
汽车实用技术(2021年23期)2022-01-05
客车技术与研究(2019年2期)2019-11-26
汽车杂志(2018年6期)2018-06-25
作文周刊·小学一年级版(2017年27期)2017-08-10
神州·中旬刊(2017年1期)2017-06-28