
综采工作面用拖缆箱电气系统设计
2019-08-22 09:54王青松
煤矿机电 2019年4期
王青松
(山西晋煤集团 阳城晋圣上孔煤业有限公司, 山西 晋城 048100)
0 引言
综采工作面的采煤机在工作时,需要在刮板输送机上循环往复运动。由于采煤机上电动机需要连接电缆为其供电。其连接采煤机电缆的长度会随时发生变化,采煤机在机头位置时,电缆长度最短,随着采煤机的运动,电缆的长度会慢慢变长,直至采煤机运行到机尾位置,电缆长度达到最长。采煤机回程时,电缆长度会慢慢变短,直至采煤机运行到机头位置,电缆长度达到最短[1]。因此,在采煤机的一个往复运动中,电缆长度由短变长,进而又由长变短。在采煤机工作中,电缆是是十分重要的辅助设备,经常会出现电缆被拉断,造成采煤机直接停机的情况。因此,电缆的有效管理成为采煤机正常工作的一个关键因素。为此,设计拖缆箱,控制电缆与采煤机形成速度匹配,为采煤机提供可靠电源保证。
1 设计总体要求
1) 系统输入电压为AC1140/660V,拖缆箱的电动机功率为20 kW,利用变频器对电动机进行控制,变频器采用水冷的冷却方式。
2) 实现拖缆部与采煤机的协同控制,工作时拖缆箱根据采煤机的牵引速度,实时改变电缆长度。
3) 拖缆箱装载在综采工作面的设备列车上,该拖缆箱应具备完善的电气保护功能,有显示运行参数以及故障信息的人机界面,配备TCP/IP网络接口,能与煤矿井下主网连通,并具备无线Wi-Fi发送数据接口。
2 硬件设计
根据设计要求,综采工作面用拖缆箱硬件设计中主要用到的电气元器件包括断路器、变压器、变频器、绝缘监视器、PLC控制器以及显示屏等,硬件清单如表1所示[2-3]。

表1 拖缆箱电气系统硬件清单
综采工作面用拖缆箱的硬件设计分为主回路电气系统设计以及控制系统设计两方面。
1) 主回路设计。主回路电气系统设计原理见图1所示。断路器的操作方式采用手动操作方式,供电电源经变压器后为变频器供电,由变频器直接驱动电动机工作,同时采用绝缘监视模块监视漏电情况。另外,在电动机上U、V、W相各安装一个霍尔型电流传感器,将测量的电流值输入PLC控制器,用于对电动机进行过载、过流、粘连等保护。
2) 控制系统设计。控制回路的核心是PLC控制器以及其扩展模块,电动机的起/停,加速、减速以及急停等操作都由PLC控制器经过逻辑处理后驱动。PLC控制器与变频器之间采用CAN通信进行数据传送,并由变频器直接驱动拖缆电动机。PLC控制器与HMI人机界面之间也采用CAN通信进行数据交互[4-5]。为保障CAN通信质量,必须增加CAN通讯隔离栅,对CAN信号进行隔离,并采用屏蔽双绞线,屏蔽层必须接地。为了使该电气系统的所有数据以无线传输的方式发送给综采工作面集中控制中心,增加CAN转Wi-Fi模块,将CAN通信数据转变成Wi-Fi无线信号。控制系统见图2所示。

图1 主回路电气系统
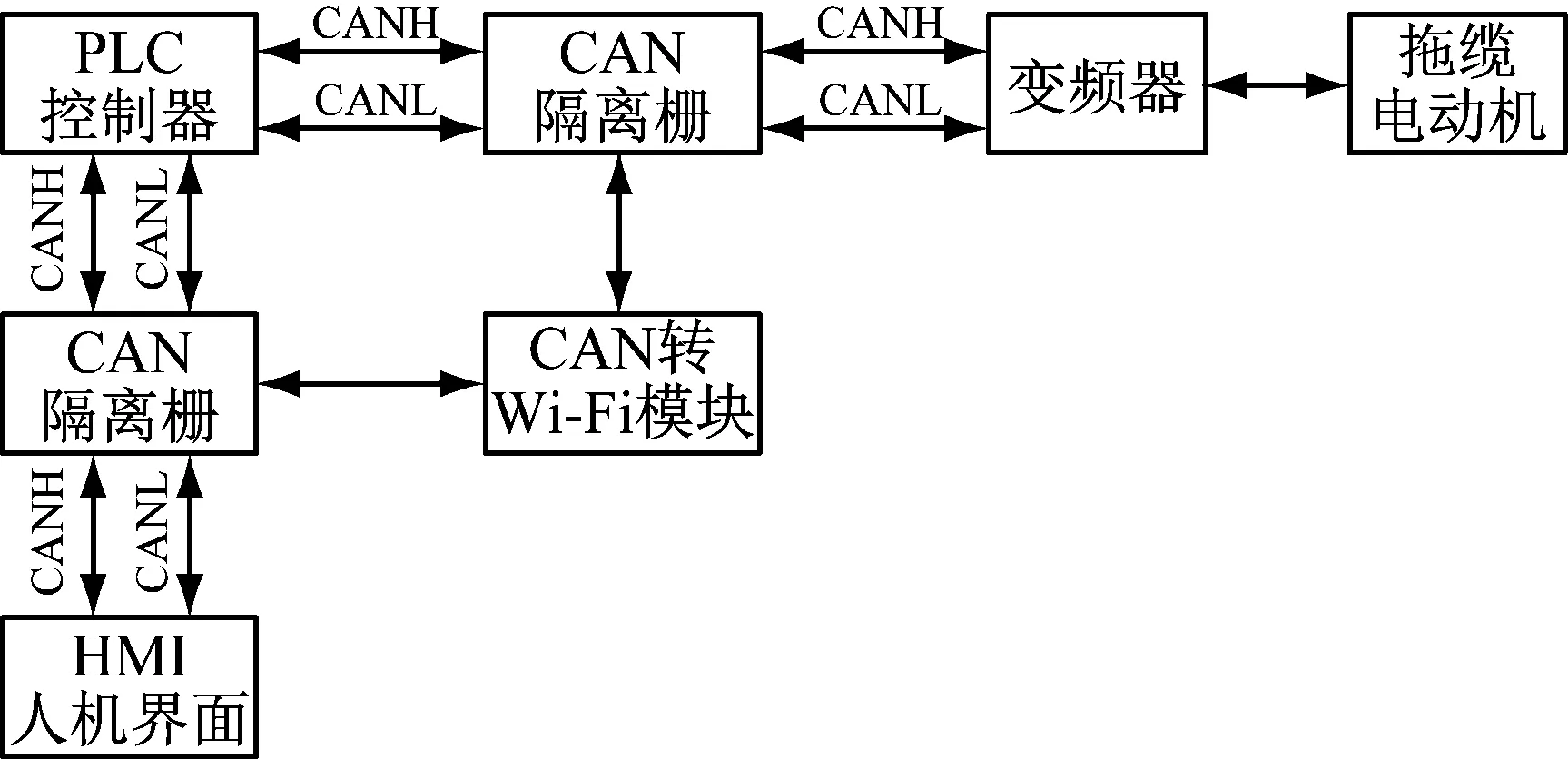
图2 控制系统框图
3 软件设计
3.1 PLC程序设计
拖缆箱PLC主程序流程如图3所示。

图3 PLC主程序流程
1) “初始化”主要完成对PLC程序中用到的变量的初始化,布尔型变量初始为False,非布尔型变量初始为0。
2) “CAN通信建立过程”主要完成PLC控制器与变频器以及与人机界面的CAN通信的建立过程,该过程严格按照CAN通信协议规定的流程以及参数配置进行建立。
3) “电动机保护/起动流程”主要完成对电动机的过载、过流、粘连等保护动作以及检测电动机起动条件,在满足条件的情况下起动电动机。
4) “与变频器数据处理”主要完成PLC控制器与变频器之间的CAN通信数据、指令的交互。
5) “与人机界面数据处理”主要完成PLC控制器发送拖缆箱运行时的参数信息以及故障指示,由人机界面进行画面显示。
拖缆箱需保证采煤机在运行时线缆的长度保持在预期范围内。故在采煤机运行时,拖缆箱必须跟随采煤机运动,即拖缆箱与采煤机的预期速度差必须保持在预期范围内。拖缆箱速度控制流程如图4所示。首先设定预期速度差,同时周期性地获取采煤机速度以及拖缆箱速度,对这两个速度进行减法操作:如果实际速度差大于预期速度差且采煤机速度大于拖缆箱速度,则拖缆箱加速;如果实际速度差大于预期速度差且采煤机速度小于拖缆箱速度,则拖缆箱减速;如果实际速度差小于或者等于预期速度差,则拖缆箱速度保持恒定。

图4 拖缆箱速度控制流程
3.2 HMI人机界面设计
拖缆箱电气系统的人机界面如图5所示,人机界面可以监视采煤机状态,包括启动/停止状态、电压值、电流值、速度,还可监视拖缆电动机状态,包括加速、减速、速度恒定。人机界面还可显示拖缆电机故障、通信状态以及故障信息,便于拖缆箱出现故障时对故障进行及时、准确的定位。

图5 拖缆箱电气系统监控界面
4 结论
该拖缆箱电气系统可以控制线缆长度与采煤机速度的匹配在合理范围之内,不会因线缆过长或者过短而发生故障。拖缆箱电动机采用变频控制方案,保证了线缆长度实时可调、可变。经井下工业性试验证明,系统运行安全、稳定,基本满足了设计要求。但仍存在一些问题,之后的研究中应重点关注拖缆箱与采煤机的速度精确匹配以及协同控制,以取得更好的使用效果。
猜你喜欢
消费电子(2022年6期)2022-08-25
防爆电机(2022年1期)2022-02-16
河北画报(2021年2期)2021-05-25
电子乐园·下旬刊(2021年3期)2021-02-08
防爆电机(2020年3期)2020-11-06
煤矿机电(2019年6期)2020-01-13
电子技术与软件工程(2019年15期)2019-12-03
活力(2019年22期)2019-03-16
汽车文摘(2019年3期)2019-03-04
电子制作(2019年23期)2019-02-23
