
有/无人机协同使用声纳浮标应召搜潜研究*
2019-08-27 03:46潘宣宏
火力与指挥控制 2019年7期
徐 梁,潘宣宏,韩 鹏
(1.海军指挥学院,南京210016;2.海军航空大学,山东 烟台264001)
0 引言
应召搜潜是指反潜航空兵在机场、载舰或指定空域待命,当获得敌潜艇的活动信息后,根据命令飞往发现潜艇海区进行的搜潜战斗行动。应召搜潜的特征是已知目标在搜索前某一时刻的大概位置[1]。反潜机的搜潜器材主要有声纳浮标、磁探仪和搜索雷达。其中声纳浮标可快速完成布设,覆盖海域面积大,是应召搜潜的主要手段[2]。目前相关研究多集中于单架或多架反潜机布设浮标阵形的分析上,较少涉及反潜机和无人机协同使用声纳浮标搜潜内容。但随着无人机的广泛运用,在未来反潜作战中很可能发挥重要角色。因此,以反潜机和无人机协同使用声纳浮标对潜应召搜索为前提,预先研究两者的运用过程、协同方式,以及无人机监听航线规划等问题就显得尤其重要。
1 有/无人机协同反潜特性
1.1 反潜机反潜特性
1.1.1作战能力强
反潜机起飞重量大,一次可以携大量声纳浮标,能够覆盖较大海域面积。例如美军的P-8A反潜巡逻机可以携带120多枚声纳浮标,可同时监听60多枚被动声纳浮标[3]。另外还携有磁探仪、雷达和先进反潜鱼雷系统等,能够独立完成对潜艇的探测、跟踪和攻击过程。
1.1.2安全性较差
反潜机与战斗机相比机动性能差,缺少自卫武器,一旦遇到敌空中拦截将很难摆脱。尤其是反潜巡逻机雷达辐射面积大,很容易被作为攻击目标。
1.1.3反潜效果受外界条件影响大
以往布设和监听声纳浮标都需反潜机完成,加上在监听过程中,要连续转弯机动,以保持长时间重复性监听,这使得飞行员的精力消耗较大,飞机操控难度较高。这也导致实际用于监听时间有限,搜潜效率并不高。另受飞机性能影响,在监听航路设置上约束条件多,如转弯半径、俯仰角度和速度等,通常难以选择最优监听航路飞行。
1.2 无人机反潜特性
1.2.1续航时间长,作战半径大
随着核动力、AIP等新型动力技术和隐身技术的快速发展,现代潜艇兵力的水下续航时间更长、静音效果更好。因此,现代反潜体系应具备对敌潜艇进行持续探测的能力,才能满足作战的需要。目前大中型无人机平台的续航时间普遍在40 h以上,甚至可达几天或几周,即使小型无人机也在20 h左右[4],有/无人机协同反潜作战可有效弥补反潜机在留空时间上的不足,同时弥补水面舰艇速度上的劣势,形成优势互补。
1.2.2隐蔽性较强,受外界影响小
无人机雷达反射面积小,针对有人机设置的雷达很难发现无人机。再者无人机受地理环境影响小,可通过超低空掠海飞行增大突防概率,或将飞行高度设置在万米高空,以摆脱敌防空武器的射击范围。并能够代替反潜机执行重复性的监听任务,进而将飞行员从中解放出来,集中精力于整个态势的感知和对无人机的控制上来。又因无人机更加机动灵活,实现快速转弯和改平等战术动作,容易选择较优航路实施监听,提高监控效率。
1.2.3造价相对低廉,使用更加灵活
无人机成本相比反潜机和潜艇都要低很多,即便无人机集群作战的成本也相对低廉,因此,一旦遇有威胁或损坏也不会造成任务和成本的较大损失,具有“以小博大”的效果。目前无人机已实现舰载、空中发射与回收[5],能够根据需要灵活部署,加上其基本不受飞行过载的影响,在与有人机协同配合上可选择的战术方法更加多样。
2 有/无人机协同使用声纳浮标应召搜潜分析
2.1 协同搜潜过程
综上所述,通过有/无人机优势互补,可以明显提升应召搜潜的效率。实际操作中可由反潜机携带数量较多的声纳浮标,快速到达指定海域按相应阵形布设声纳浮标,并根据事先获取的潜艇位置信息和运动要素,及应召延误时间,确定以扇面阵或圆形阵进行布设[6]。再根据搜索海域的大小、形状和声纳浮标布设范围等,确定无人机的监听方案,转入对浮标阵的监听。一旦无人机在监听过程中接收到敌潜艇信号,即回传至有/无人机协同网络,使有/无人机之间、无人机群之间共享同一态势,并根据反潜机下达的任务指令改为协同对潜跟踪或实施协同攻击。
反潜机根据前出距离的大小和敌空中威胁情况,占据有利空域监控无人机作战行动,完成信息收集、处理、规划和控制无人机,由于对战场情况的掌握更加及时和直观,能够有效协调无人机行动。但在起飞集合、飞向战区和返航降落阶段,指挥控制权应由反潜机转交给地面(海上)控制单元,实现快速展开和撤离。多无人机集群内部采取分布式控制,即各无人机充当网络节点接收相应控制指令,进而编码转换成可以执行的参数,并对自身飞行姿态进行修正,实现集群内部的导航、防相撞、协同和网络重构等功能[6]。
2.2 协同搜索方式
2.2.1扇形区域协同搜潜方式
无人机和反潜机协同应召搜潜,当已知敌潜艇的航向范围,并通过外界信息预估得到敌潜艇可能航速,此时反潜机应快速在敌潜艇航向前布设浮标障碍,遮拦其航行宽度,并由无人机完成监听任务。通过这种区分任务协同,减少了反潜机为保持布设和监听浮标同步所做的复杂机动,同时还能缩短整个延误时间,从而提高搜潜的效率。考虑敌潜艇运动要素误差和延误时间等,认为敌潜艇以最大航速抵达第1道浮标障碍Arc-1。
实际中为降低自身被探测的概率,敌潜艇将利用小噪声航速,在浮标障碍Arc-1工作期间,敌潜艇很可能未抵达依据敌潜艇最大航速而布设的声纳浮标障碍,此时反潜机需布设数道浮标障碍拦截[7]。其中浮标障碍的数量根据反潜机携带的声纳浮标数量,无人机的数量和监听能力而定。无人机在多道声纳浮标障碍中的监听方式可以采取单架进行监听,若超出其监听范围则改为多架无人机分区域实施监听。
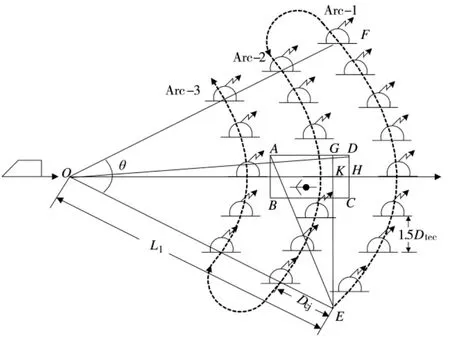
图1 有/无人机扇形区域布设和监听浮标阵示意图
如图1所示,反潜机布设的第1道拦截障碍Arc-1与发现潜艇位置点O的距离为L1。

式(1)中,Vmax为预估的敌潜艇最大航速;t1为第1次获得与敌潜艇接触至反潜机接到起飞指令的时间;t2为反潜机起飞所消耗的时间;t3为反潜机飞至搜索区所用时间;t4为反潜机布设第1道浮标障碍所用时间;epoin为确定的最后丢失接触点和飞机进入搜索区位置合成均方差。
根据L1与实际消耗时间计算潜艇能够抵达第1道浮标障碍Arc-1的最小航速,进而利用该航速再确定第2道浮标障碍的位置,以此类推直至内侧的浮标障碍发现潜艇或小于当时条件下敌潜艇最低航速,则停止布设[8]。其中,每层浮标障碍的长度Larc-length、浮标障碍总长度LTol-length和所需的浮标数量N分别为:
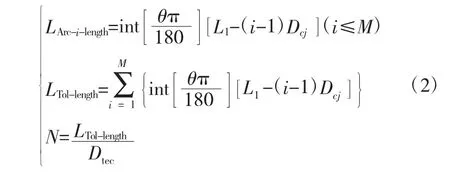
式(2)中,θ为敌潜艇来袭扇面角;M为反潜机布设的浮标障碍层数;Dtec为声纳浮标的探测距离;Dcj为浮标障碍层距。
2.2.2圆形区域协同搜潜方式
当已知敌潜艇丢失位置点,潜艇的航速和航向都未知时,为尽快与敌潜艇再次建立接触,此时反潜机应布设圆形浮标阵。根据延误时间、敌潜艇航速范围和完成任务时间要求等,确定具体布设几道圆形阵,其原理和计算公式与扇面浮标障碍相似。无人机在圆形阵内采用相应的监听方案对声纳浮标监听。如果圆形浮标阵范围较大,需相应增加无人机的数量分区域协同监听,但应由反潜机明确各架无人机的进入方向、速度和高度,以及规划每架无人机具体的监听航路,如图2所示。
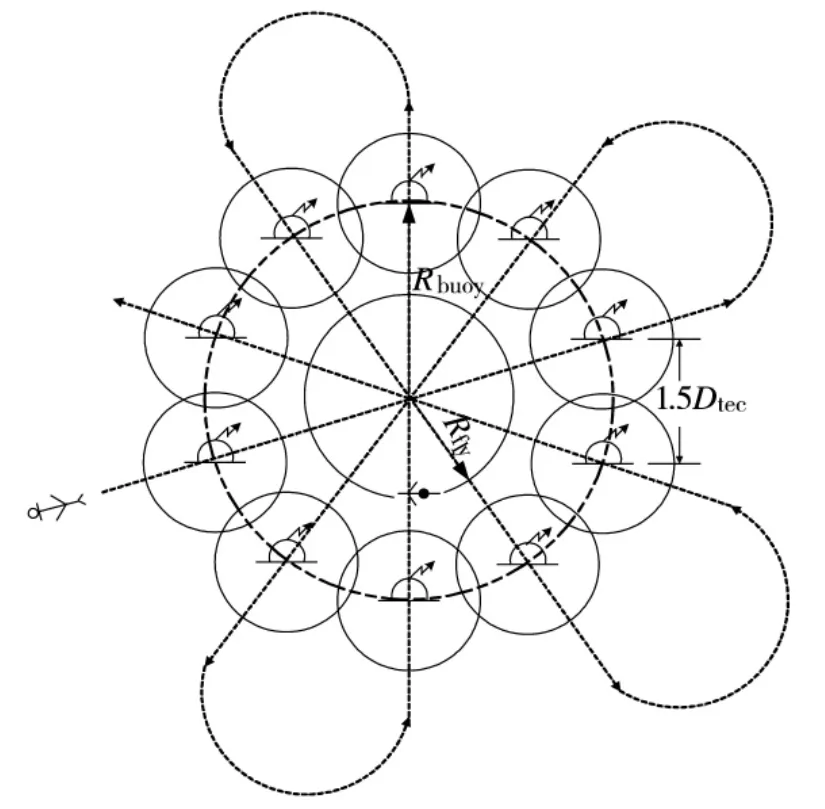
图2 有/无人机圆形区域布设和监听浮标示意图
有/无人机无论采取哪种协同方式,应召搜潜概率与无人机的监听方案直接相关。因此,应在油量、航程等相关约束条件下,根据当时的作战态势,综合各传感器信息,由反潜机实时在线规划无人机的监听航路,即确定无人机的航线、飞行高度和速度。因无人机的留空时间要远大于反潜机,为保持对无人机的连续控制,可采取反潜机空中换班或与舰载(岸基)指挥系统交替指挥,实现对无人机控制的无缝对接。
2.3 无人机监听航路规划
2.3.1航路代价函数
无人机在规划监听航路过程中要考虑的代价因素很多,如航线长度、飞行时间、耗油量和受敌情威胁等,下面分别进行分析。假定无人机在监听过程中匀速飞行,无人机的耗油量可以表示为:

式中,Moil为无人机按某条路径飞行时的耗油量;t为无人机按某条路径飞行时间;eoil为无人机耗油率;D为无人机按某条路径飞行距离;v为无人机按某条路径的平均飞行速度。
为保持稳定接收声纳浮标无线电信号,无人机除在起飞、降落或状态转换时会出现变速,在监听过程通常处于定高、定速的状态下飞行。由式(3)可知,在监听过程中的耗油量、飞行时间都将与其飞行长度成正比,进而可得出无人机在监听过程中耗油量和飞行长度的函数为:

式中,WD是无人机在第i条路径飞行时的路径代价;Di为无人机在第i条路径飞行时路径长度;k为路径系数(可视为不变);i为监听航路中任意两航点间可能飞行路径中的一条。
无人机在监听过程中受到的威胁一方面来自于集群内部可能发生的碰撞威胁;另一方面来自于敌防空威胁,因而无人机在任意两点间按某一条路径飞行的代价函数可表示为:

式中,Wi是无人机第i条路径飞行的总代价;Ai是无人机在第i条路径飞行时的威胁代价。
因此,假定当无人机在各自区域不存在威胁,从开始直至结束监听总的飞行代价W为:

式中,j是无人机在监听过程中飞行路径的数量。
通过式(5)可见,无人机执行监听任务的总代价取决于飞行路径的长度。
2.3.2监听航路规划
1)扇形应召搜潜无人机监听航路规划
已知敌潜艇来袭扇面,无人机监听航路可以沿着预估的敌潜艇航向,也可以垂直于敌潜艇航向,如图1所示的监听方案:
由此可得:

综合上述分析,随着敌潜艇的速度逐渐减小,反潜机所布设的声纳浮障碍会逐渐向O点靠近。假设敌潜艇在O点保持静止时,声纳浮标将覆盖整个扇面区域。当敌潜艇来袭扇面角θ一定,L1与AE、OD成正比,与KG、DH、AD成反比,因此,只有满足:

式(7)中,Dcom为无人机可以有效监听浮标距离;Rmin为无人机最小转弯半径。
此时单架无人机能够覆盖的声纳浮标障碍半径最大为LUAV-max。即只有当无人机按照最小转弯半径进行圆周飞行时监控扇形区域面积最大,如图3所示。若L1>LUAV-max,应指派多架无人机分区域协同实施监听,这里不作深入讨论。

图3 无人机采取圆形监听航路监听扇形区域
2)圆形应召搜潜无人机监听航路规划
图4 圆形浮标阵无人机监听航路示意图
敌潜艇航速和航向范围都未知情况下,为尽快与敌潜艇建立接触,在反潜机携带声纳浮标数量足够的情况下,应采取包围的方式。如图4所示,Rbuoy为圆形声纳浮标阵的半径;Rfly为无人机监听圆形声纳浮标阵的飞行半径。当Rfly+Rbuoy>Dcom时无人机在监听的过程中总会有部分声纳浮标不能被监听;当Rfly+Rbuoy≤Dcom时将能够保证所布设的声纳浮标全部在无人机监听范围内。针对第1种情况,为防止敌潜艇逃逸只能增加无人机的数量,扩大监听范围。这里对第2种情况下单架无人机监听航路规划问题进行分析。
通过上面分析可得Rbuoy≤Dcom-Rfly,因此,只有当无人机监听飞行半径Rfly最小时,此时监听的浮标阵最大。因又存在Rfly≥Rmin,所以无人机可以监听的最大浮标阵半径为:

式(8)中,Rbuoy-max为无人机可以监听的最大圆形浮标阵的半径。
综上所述,无人机按照最小转弯半径做圆周飞行监听声纳浮标障碍,此时的航路代价最小,同时监听的声纳浮标障碍半径最大。
3 实例分析
3.1 计算条件
这里仅以反潜机布设扇面浮标阵,无人机按照长方形监听航路为例进行说明。
假设敌来袭扇面角为60°,从接到任务指令直至到达任务海域耗时0.5 h;预估的敌潜艇最大航速为18 kn,小噪音航速8 kn,并沿扇面角平分线进入浮标阵,且方向不变;无人机速度39 m/s,无人机实际转弯半径5 km,最小转弯半径4 km,无人机监听航线2AD=DC=20 km;反潜机共布设3层浮标障碍,层间距为1.9倍声纳浮标作用距离,每层浮标间隔为1.5倍声纳浮标作用距离,浮标作用距离为3 km,浮标工作寿命2 h,无人机与浮标通信距离40 km。
3.2 计算结果
由假设条件,以及式(5)式(6)可得无人机能够监听的最大扇形浮标障碍半径:

又由式(1)可得:

因此,一架无人机完全可以监控依据敌潜艇最大航速所布设的浮标障碍。根据式(3)~式(6)和图1,可得无人机实际监听航路代价:

而由式(7)和图3可知R机=Rmin时无人机的航路代价最小为Wmin,计算如下:

由式(2)可得,扇面浮标阵相关参数为:
3.3 结果分析
通过对上述计算结果的分析,可知:
1)采取反潜机布设扇面浮标阵,无人机采取方形监听方案可行。
2)在满足相关约束条件下W与规划的无人机监听航线长度成正比,当无人机以Rmin为半径的圆形监听航线时代价最小,但无人机需连续转弯监听,飞行控制难度较高,应谨慎采用。实际中采取一边为2Rmin,另一边小于浮标阵的类椭圆形跑道监听航线为宜。
4 结论
本文介绍了应召搜潜时有/无人机使用声纳浮标协同运用过程,在此基础上详细分析了协同模式和无人机监听航线规划问题,提出无人机监听时最优航路,并通过计算进行验证,为今后研究有/无人机协同反潜作战打下了一定基础。有/无人机使用声纳浮标应召搜潜只是两者协同反潜的一部分,在检查和巡逻反潜中对于协同方式、监听航线规划等问题上会存在明显不同,这将是今后的研究方向。
猜你喜欢
军事文摘(2022年14期)2022-08-26
电子技术与软件工程(2022年9期)2022-07-09
火力与指挥控制(2022年2期)2022-03-23
火力与指挥控制(2021年8期)2021-09-08
考试与评价·八年级版(2020年5期)2020-10-29
军事文摘(2020年3期)2020-04-02
火力与指挥控制(2020年2期)2020-04-02
导航定位与授时(2020年1期)2020-02-18
电子技术与软件工程(2020年7期)2020-02-05
航空知识(2001年5期)2001-06-12
