
“秋千式”月面下降/上升单级可重用运输系统概念设计
2019-08-29 01:50何湘粤李海阳杨路易黄海兵
载人航天 2019年4期
何湘粤,李海阳*,杨路易,黄海兵
(1.国防科技大学空天科学学院,长沙410073;2.长沙翔宇信息科技有限公司,长沙410205)
1 引言
月球作为距离地球最近的天体,是人类开展太空探测和资源利用的首选目标[1-2]。20世纪以来,美国和苏联开展了大量月球探测活动。美国先后发射了“先锋”、“艾布尔”、“徘徊者”、“勘测者”、“月球轨道器”、“探险者”、“阿波罗”7 个系列以及“克莱门汀”、“月球勘探者”共56个月球探测器,成功率为66%;苏联发射了“月球号”、“探测号”、“宇宙号”、“联盟号”等系列共64个月球探测器,成功率为32.8%[2-4]。进入21世纪后,世界各航天大国实施了多项月球探测活动,月球再次成为太空探测的热点[4]。
到目前为止,唯一成功的载人登月任务是美国的阿波罗计划[5]。阿波罗工程开始于1961年5月,于1969年7月Apollo 11号首次实现载人登月;到1972年12月,共发射了7艘登月飞船,除Apollo 13号外,其余6次均获得成功[6-9]。Apollo 11号飞船总重45 130 kg,由指令舱、服务舱和登月舱3部分组成,通过土星5号运载火箭1次发射进入奔月轨道[1]。
我国于2004年启动了“嫦娥”工程。工程以无人探测为主,规划分三期实施,分别实现绕月探测、月面软着陆与月面巡视勘察、月面巡视勘察与自动采样返回地球,简称为“绕”、“落”、“回”3步走,目前已经完成绕月飞行探测以及着陆器月面巡视勘察等任务[10-11]。探月返回方面,探月三期月地高速再入返回飞行器是我国首个探月返回飞行器,也是我国首次采用跳跃式再入方式返回地面的飞行器,其成功为之后的月球自动采样返回任务奠定了坚实的基础[12]。
按照嫦娥工程规划,下阶段将要完成采样返回。进一步需要完成载人登月,建立月球科学试验基地等工程任务,届时将需要开展大批量的人员月地往返运输任务,对于载人月面着陆与上升飞行器的需求十分迫切。目前我国正在进行载人登月和载人深空探测工程论证,现有飞行器难以满足载人月面着陆与上升的任务需求[13-14]。
针对月地往返大速度增量需求的情况,Hoyt等[15]提出一种搭建地月绳系卫星运输系统的创意设计方案,由近地轨道和环月圆形低轨道上的两个旋转绳系卫星组成,仅需要很少的速度增量即可实现地月间有效载荷的往返传输。使用该运输系统完成月面下降/上升时,绳系卫星上配重的移动使绳的近月端与月面距离减小至1 km左右,且相对月面的速度几乎为零。但该系统需要在向月面释放一定载荷的同时,在月球表面捕获相同质量的载荷,以保证整个任务过程中系统的轨道能量和动量守恒。因此,该系统仅适用于月地之间的货物传输,不能直接用于载人登月任务。
本文针对未来载人登月任务需要,在充分继承现有载人月面着陆与上升飞行器的研究基础上,基于绳系结构姿轨运动强耦合特性,提出一种在环月轨道位置部署的高速旋转的绳系空间站——“秋千式”月面下降/上升单级可重用运输系统的概念,以期降低月球探测成本。
2 方案概述
2.1 运输系统组成与功能
“秋千式”月面下降/上升单级可重用运输系统由“秋千式”旋转平台(简称旋转平台)、月面单级往返运输飞行器(简称登月舱)和地月往返飞行器(奔月时简称飞船,返回时简称返回舱)构成。运输系统组成如图1所示。

图1 运输系统组成Fig.1 Composition of the transportation system
旋转平台用作月球探测的动量存储/释放媒介,旨在降低环月制动、月面下降、月面上升、月地返回的冲量需求。该平台由轮站核心与轮站配舱在轨组装而成,平台两端设置有“魔方式”吊装机构以及勾环式对接机构,在载人月球探测前,在吊装机构上预先部署月面单级往返运输飞行器及生活舱等设施,对应的两端吊装机构总质量均为28 t。旋转平台运行在环月轨道上,暂定300 km高的圆轨道附近,平台两端通过长达300 km的轻质高强度吊绳连接大型吊装机构,吊装机构绕平台质心以1250 m/s左右的相对速度与轨道同向旋转,对应的平台自转角速度为8.33×10-3rad/s,能提供1g左右的人工重力环境。吊绳的用材为碳纳米管,密度为 1300 kg/m3,抗拉强度为130 GPa[16]。考虑吊绳的质量为8 t,相应的横截面积为2.05×10-5m2,直径约为2.88 mm。
单级往返飞行器用于完成载人月面下降与上升。该飞行器重8 t,带有约3.5 t推进剂,可提供1600 m/s的总速度增量;采用单舱低底盘设计,可实现3人左右的月面往返运输任务;具有月面亚轨道飞行能力,可与相对月面150 km高、相对速度几百米每秒左右的旋转平台吊装机构快速交会对接,并可适应较大范围的位置和速度偏差。
地月往返飞行器用于完成人员地月转移。由于旋转平台远月端速度达到了月球的逃逸速度,该飞行器只设计了两个舱段:返回舱和推进舱。推进舱重6 t,为一次性舱段,主要功能为燃料运输,并具有一定的变轨和对返回舱的辅助支持能力;返回舱重6 t,可用于3~4人的地月人员运输,并可重复使用。探测任务完成后,返回舱在合适的相位被甩回地球,推进舱留置于吊装机构部分,为月面单级往返运输飞行器和旋转平台补给燃料,也可作为平台配重或者月球撞击实验部件。
2.2 任务过程整体描述
运用“秋千式”月面下降/上升单级可重用运输系统进行载人月球探测时,任务可以分为两大类:旋转平台建造任务和载人月球探测任务。其中,旋转平台建造任务是载人月球探测的准备阶段,发射的都是无人飞行器,任务时间较为灵活,搭建后可以长期使用,只需要单向运输;载人月球探测任务则是环月空间站搭建好后的具体载人应用,需要在任务时间、安全性方面更加注重,每次探测任务需要一次新的发射,并需要从月球返回。
2.2.1 旋转平台建造任务
旋转平台的建造过程共包括4次发射任务:第1、2次发射主要用于搭建旋转平台的主体结构;第3次发射将月面单级往返运输飞行器装配至旋转平台;第4次发射为可选情况,与第3次发射相同,用于任务的冗余备份和月面救援任务。旋转平台建造过程如图2所示。
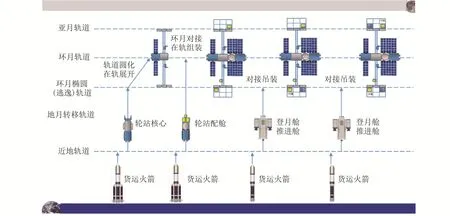
图2 旋转平台建造过程Fig.2 Construction process of the swing platform
第1次发射:通过运载火箭将旋转平台的轮站核心部分运送至地月转移轨道,到达距离月面300 km高度附近时,轮站核心进行制动,并进行轨道圆化调整,使整体沿300 km高的环月轨道作圆周运动。随后,轮站核心中的绳舱开始释放一定长度的吊绳(下文简称“绳”),两端连接的机构在绳所在平面内向相反的方向喷气,使整体开始进行自旋。
第2次发射:通过运载火箭将旋转平台的轮站配舱部分运送至地月转移轨道,到达轮站核心远月端所在位置的附近时,轮站配舱进行制动,并与轮站核心完成交会对接。随后,轮站配舱将能源舱与服务舱进行分配,安排至绳的两端。待结构组装完成后,开始逐渐释放绳,并通过与第1次发射相同的喷气方式保持整体的自旋角速度,直至绳完全释放至300 km。至此,旋转平台主体结构搭建完成。可认为前两次任务发射质量相等,均为24 t。
第3次发射:通过运载火箭将8 t的登月舱运送至地月转移轨道,到达旋转平台远月端所在位置的同时,平台对接机构转动到远月端。通过勾环式对接方法,平台勾住登月舱伸出的挂环,将登月舱拉至魔方式吊装结构中,并通过旋转重组实现对舱体布局的合理安排。
第4次发射:同第3次发射,最终在平台的两端对称布置两个登月舱。至此,可重用登月舱已经装配至旋转平台中。
在长期月面探测任务中,登月舱设计为可重用,当其到达设计寿命时,需要重复第3次发射任务,替换对应的飞行器。在装配完成后,旋转平台需要进行轨道维持和修正,因为环月飞行时间较长,可以采用高比冲的电推进系统进行这项工作,成本将远低于常规变轨,不会对方案造成大的技术问题。
2.2.2 载人月球探测任务
每次载人月球探测需要进行1次载人地月往返飞行器发射,整个探测任务如图3所示。探测任务从地月转移开始可以分为以下阶段:
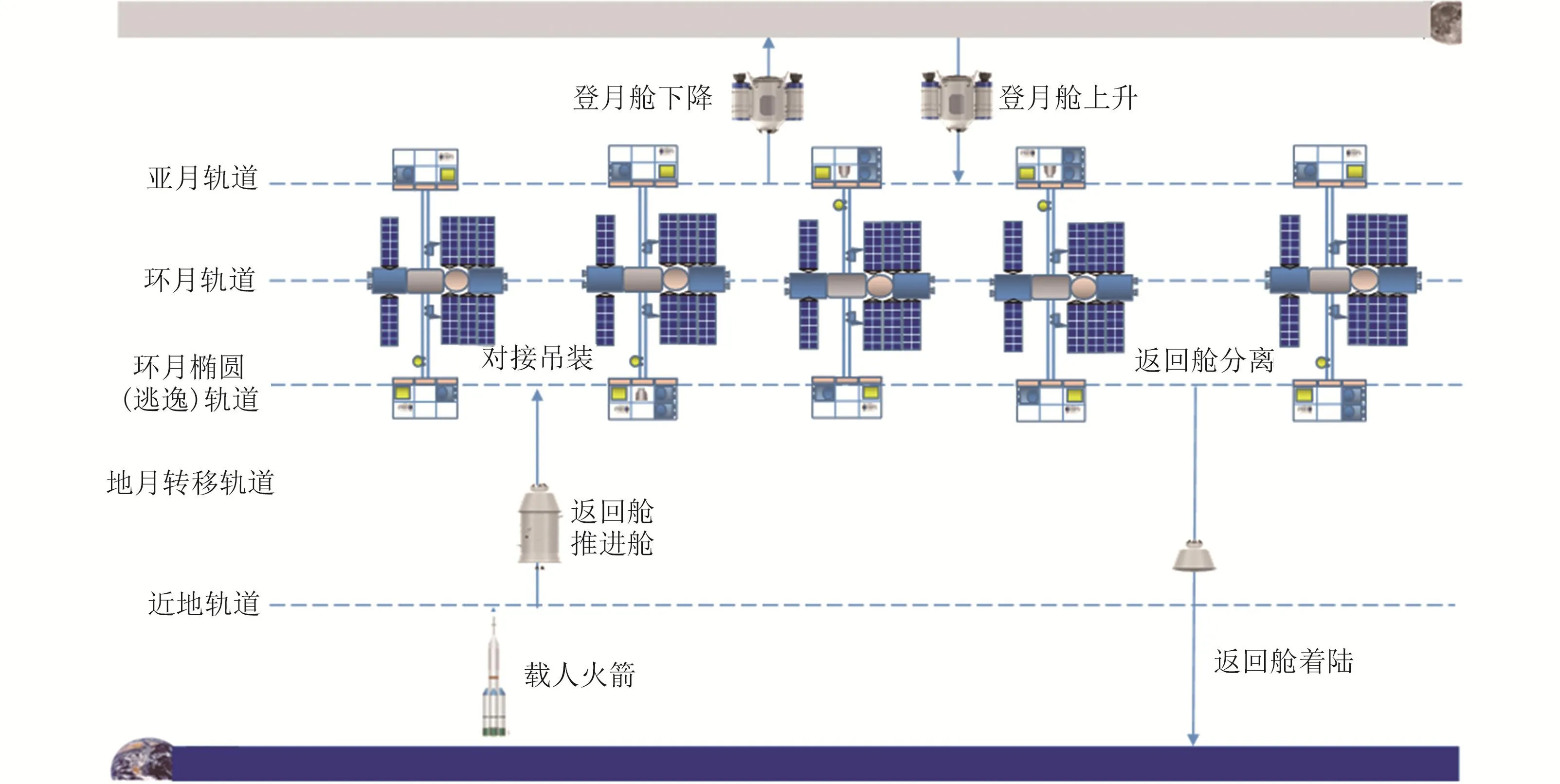
图3 载人月球探测任务过程Fig.3 Manned lunar mission scenario
地月转移阶段:通过运载火箭将载人地月往返飞行器(包括返回舱与推进舱)运送至地月转移轨道,待旋转平台对接机构转至远月端时,来自地月转移轨道的载人地月往返飞行器同时到达轨道近地点附近位置,两者完成交会对接。通过地月转移轨道的初始瞄准和中途修正,原理上可使得两飞行器在对接点相对速度自然为零,设计中考虑偏差引入了一定的轨道修正余量。
探测前环月飞行段:旋转平台魔方式吊装机构对推进舱、返回舱进行分解吊装和旋转重组,返回舱与环月密封舱段对接,推进舱用于为平台和月面单级往返运输飞行器补给燃料。在月球探测前,航天员需要转移到登月舱中,并与其它密封舱段分离,由悬吊系统吊装到待释放位置。
月面下降阶段:当平台质心运行到着陆点附近,吊装机构旋转到近月端位置时,释放月面单级往返运输飞行器。登月舱沿亚轨道抛落月面,通过制动减速完成月球着陆。
月面探测阶段:航天员出登月舱进行短期的月面活动,活动之后返回登月舱。
月面上升阶段:当平台质心运行到着陆点附近,吊装机构旋转到特定相位时,登月舱点火进入亚轨道,并在最高点附近与吊装机构交会。通过勾环式对接机构,实现与平台的连接。
探测后环月飞行段:旋转平台吊装机构对登月舱吊装,登月舱与环月密封舱段对接。在返回前,航天员需要转移到返回舱中,并与其它密封舱段分离,由悬吊系统吊装到待释放位置。
月地返回阶段:当平台质心运行到返回分离点附近,吊装机构旋转到远月端附近时,释放返回舱。返回舱沿月地转移轨道返回地球,通过中途修正和跳跃式再入控制,降落地球特定着陆区域。
探测任务完成后,推进舱留置于吊装机构部分,继续为登月舱和旋转平台补给燃料,也可作为平台配重或和月球撞击实验部件。
由于登月过程中的燃料损耗,单次载人登月过程中的上下行动量不会完美抵消,一个周期后会对环月空间站附加一定的扰动,平台质心所在轨道也会发生一定程度的偏离。因此在下个探测周期到来之前,平台需要进行轨道维持和修正,使得平台质心所在轨道恢复到初始状态。但修正的时间可以安排较为宽松,通过电推进等先进推进方案,可以将运营成本进一步降低。
3 方案设计
3.1 动量储存与释放
旋转平台在绕自身质心进行匀速自转的同时,还沿环月轨道作圆周运动,且转动的角速度方向一致。记该旋转平台远月端到质心的距离为l1,近月端到质心的距离为l2,自转角速度为ω,质心环月速度大小为v,具体运行如图4所示。
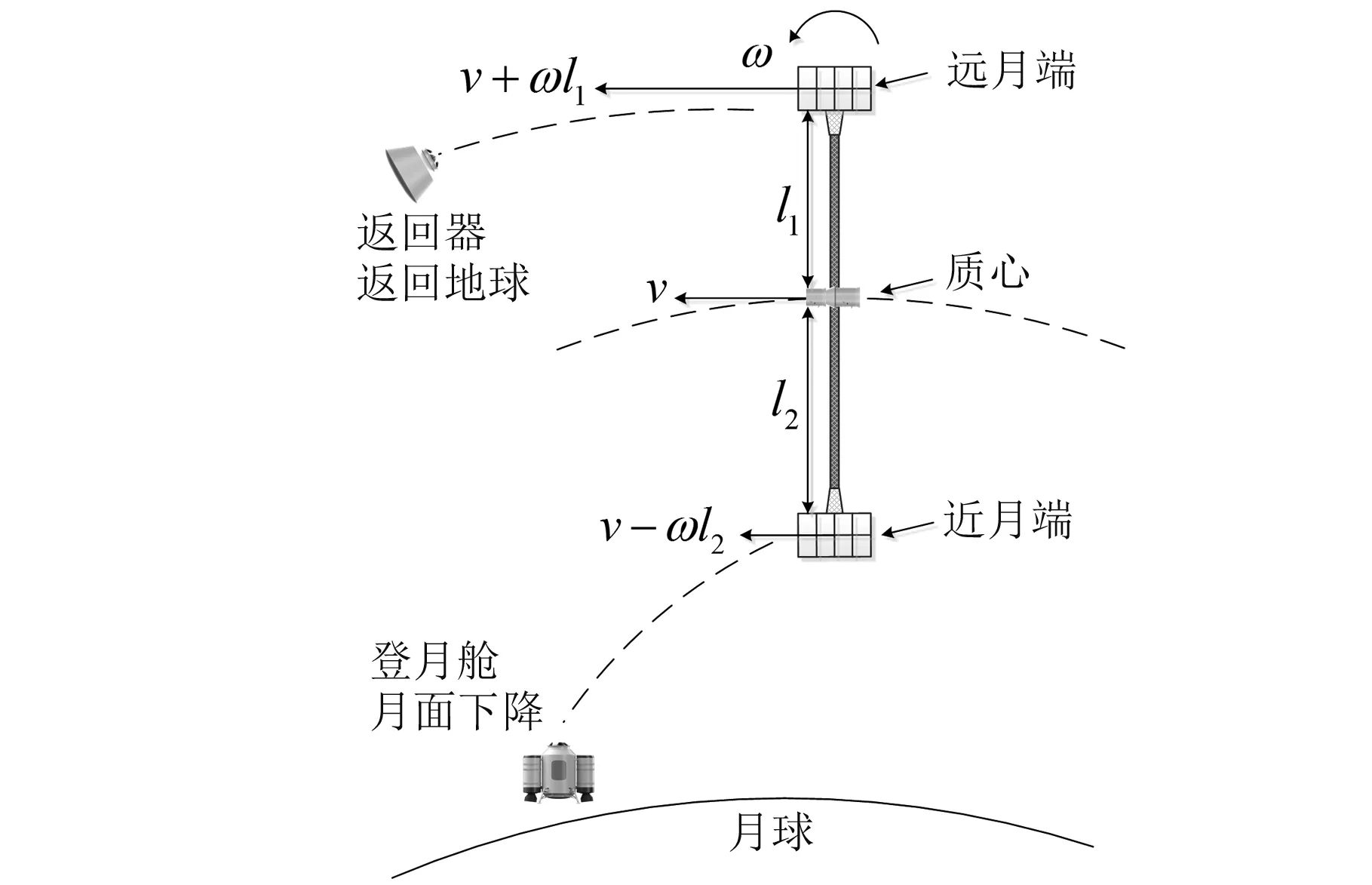
图4 旋转平台动量存储/释放机理Fig.4 Momentum storage/release of the swing platform
旋转平台远月端速度v1与近月端速度v2的表达式为式(1):
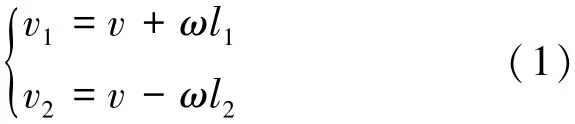
当ωl1、ωl2的值在1000 m/s以上时,远月端速度将超过月球逃逸速度,而近月端速度则会减小到只有几百米每秒。在旋转过程中吊装机构处相对月球的速度将在v1和v2之间变化,如果在特定点离开旋转平台,将会获得大小在v1和v2之间的特定速度,这一过程不需要燃料消耗。与此过程相反,旋转平台接收质量时,也可以选择特定的相位,从而无冲击地接收速度大小在v1和v2之间的飞行器。在接收或者释放飞行器的过程中,平台整体的质心位置会发生一定的变化,但不会过多地偏离绳中心位置,对绳两端速度影响不大。
载人登月任务包含地月往返和月面上下行的人员运输过程,根据以上旋转平台速度特征,在旋转平台远月端附近接收地月转移飞行器或释放返回舱;在旋转平台近月端附近释放或接收登月舱;通过平台自然旋转实现远月端和近月端转换。
在组装和释放过程中,系统的机械能守恒、角动量守恒,而在对接和组装之间的旋转平台飞行阶段,航天员所在舱段的机械能和角动量会发生持续性变化,即旋转平台和返回舱、登月舱之间存在着能量和动量的转移交换。在这一系列过程中,飞行器和平台原则上不需要消耗推进剂进行轨道控制。
3.2 月面单级往返飞行器
旋转平台作为一种特殊类型的环月空间站,可以提供在轨燃料补给加注、在轨检测维修等功能,为可重复使用飞行器提供了可能。且旋转平台大幅度降低了月面下降/上升的燃料需求,相比阿波罗任务,两级式设计已经没有必要,可以采用单级飞行器实现月面下降/上升,即单级往返。
月面单级往返运输飞行器是本方案中的登月舱,在可重用旋转平台搭建完成后,被组装到旋转平台中。该飞行器主要由密封舱、舱门、推进系统、着陆缓冲机构和对接机构组成(图1a)。密封舱主要作为航天员工作生活的场所,同时放置一些重要的仪器设备;舱门主要供航天员进出;推进系统的构型主要包括2个推进剂储箱和6个喷管;着陆缓冲机构采用四着陆腿的悬臂式着陆缓冲机构,着陆腿由主支柱、辅助支柱和足垫组成。
进行月面下降任务时,该飞行器在旋转平台的远月端与系统分离,以相对月球较低的速度下降到月面;完成探测任务后,该飞行器上升至旋转平台近月端,与平台近月端的对接机构完成交会对接。在下降与上升过程中,该飞行器始终是单级的。相比于Hoyt方案在距离月球1 km处释放荷载并同时接收月面的荷载[15],该飞行器可在距离月球150 km左右的高度下降、着陆,并上升返回至旋转平台,具备足够的机动能力,这也让该运输系统具备较大的容错能力。
3.3 双舱奔月单舱返回
由于旋转平台对环月制动和月地返回的变轨燃料需求趋向于零,传统以轨道控制为主的服务舱不再必要,尤其是月地返回时,可以直接将返回舱抛回地球,即单舱返回。但是旋转平台和登月舱需要一定的物资补给,环月制动捕获时需要修正异面偏差和控制交会对接,为此需要在奔月时设置一个额外的舱段,即双舱奔月。
双舱奔月单舱返回的设计是在可重用旋转平台搭建以及月面单级往返运输飞行器设计的基础上进行的。在搭建完旋转平台,并装配好月面单级往返运输飞行器后,即在环月轨道形成了配置了登月舱的月球轨道空间站。进行载人登月任务时,只需要发射返回舱与推进舱,并将其转移至环月轨道,与旋转平台进行对接,此过程即为“双舱奔月”。需要说明的是这里的推进舱,主要功能不仅是提供动力,更重要的是作为燃料运输器。对接完成后,将人员转移至登月舱,完成月面下降、探测与月面上升的过程;最后,由旋转平台将返回舱与推进舱送回月地转移轨道,返回舱完成高速再入,返回地球,此过程即为“单舱返回”。
3.4 勾环式对接与魔方式吊装
旋转平台的交会对接和分离释放,现有技术不可能直接应用,为此设计了勾环式交会对接与魔方式吊装结构,如图5所示。

图5 勾环式对接与魔方式吊装结构Fig.5 Fishing docking and hoisting structure
在旋转平台吊装机构处,由于离心力的作用,存在1g左右的人工重力场,在重力场中悬停、逼近等都需要付出高昂的成本,并且旋转平台的姿态和位置扰动也会远大于空间站。因此本文设计了勾环式对接捕获机构,将环固联于传统对接机构之上,将勾与吊装机构上的柔索相连,并配置一定的运动控制能力,如图5所示。交会对接时,由被吊装飞行器(飞船、登月舱)实现快速交会,进入相对吊装机构的悬停点附近,飞行器与旋转平台的吊装机构部分处于相对静止状态,即两者速度相等,位置接近;然后吊装结构伸出绳与吊钩,由吊钩主动捕获并勾住挂环,实现两者之间的初始捕获。
为便于集成化,本文将吊装机构设计为网格框架,每个单元原则上可安装维护一个舱段。在实现初始捕获后,旋转平台将借助吊装结构对飞行器布局进行旋转重组,密封舱段将被运输到生活舱段实现最后的对接,非密封舱段则会拆卸并装配到其它部位。
勾环式对接方式能够将6自由度的强约束交会对接简化为3自由度相对运动控制问题,将初始捕获与密封通道建立等问题分隔开来。魔方式吊装结构可将舱段装配问题集中到旋转平台上,降低了对各舱段的自主控制能力要求,更便于飞行器的管理与拓展。
4 可行性分析
4.1 工况设计
工况1:旋转平台日常运行状态。此时为旋转平台搭建完成,进行载人登月任务前的状态,平台两端质量均为28 t;
工况2:地月往返飞行器对接至旋转平台。地月往返飞行器经过地月转移,假定推进舱消耗1 t燃料,即平台对接了返回舱(6 t)与推进舱(5 t),一端质量增加至39 t,另一端仍为28 t;
工况3:登月舱与平台分离,完成月面下降。此时平台对接了返回舱的一端分离了8 t的登月舱,质量变为31 t,另一端质量仍为28 t;
工况4:登月舱月面上升,与平台对接。完成月面上升后,登月舱质量变为4.5 t,对接至原舱段,平台对应的一端质量变为35.5 t,另一端质量仍为28 t。
工况5:返回舱分离,完成月地返回。此时旋转平台释放重为6 t的返回舱,一端质量变为29.5 t,另一端质量仍为 28 t。
4.2 旋转平台过载
在5种工况下,进一步考虑约束条件:绳中的最大拉应力小于允许的极限拉应力;载人飞船在完成对接后,宇航员承受的过载维持在1g左右。同时,为了便于对旋转平台进行理论分析与计算,减小问题的复杂程度,可作以下假设:
1)旋转平台的绳符合等截面、匀质的条件。
2)旋转平台的绳模型采用绳系卫星中常用的刚性杆模型,即忽略绳的弹性和柔性,将其视为一根不可拉压的刚性杆。
3)绳两端机构的尺寸相比于整个旋转平台的规模可以忽略不计,即在分析平台整体运动时可将其视为质点。
根据上述约束条件和假设条件,分别计算5种工况下旋转平台两端的过载(记为过载1和过载2,其中过载2对应对接了载人飞船的一端)、绳中的最大拉力、绳的安全系数(绳的极限拉力与各工况下绳的最大拉力的比值)等数据,如表1所示。
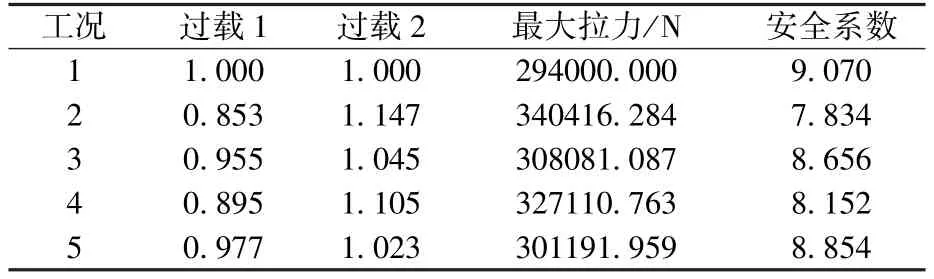
表1 不同工况下平台数据Table 1 Data of platform in different conditions
根据表1结果可知,不同工况下旋转平台整体质心位置变化对过载影响较小,旋转过载的变化量控制在15%以内,这也表明平台整体的质心不会过多地偏离绳中心位置;同时,全过程中绳的安全系数保持在7.8以上,具备较强的安全性能。综上所述,在整个载人登月任务过程中,认为平台旋转过载以及绳的强度满足约束条件要求,旋转平台的设计具备可行性。
4.3 运行轨道
将旋转平台简化为质点串模型,即:将平台两端吊装机构分别视为质点,将绳的质量集中于绳中点位置,三者通过无质量刚性杆连接。通过对每一质点进行受力分析,求外力对质心的合力和合力矩,来研究该旋转平台的轨道运动。
考虑月球引力常数μ=4.90280031×1012m3/s2,取月球平均半径为1738.2 km,初始轨道倾角i=45°,偏心率e=0.020,升交点赤经Ω=45°,近心点幅角ω和真近点角f均为0,旋转平台质心的初始高度为300 km,旋转平台初始自转平面与其质心所在轨道平面重合。采用二体运动模型,分析该质点串模型在5种工况下的轨道数据,结果如表2所示。
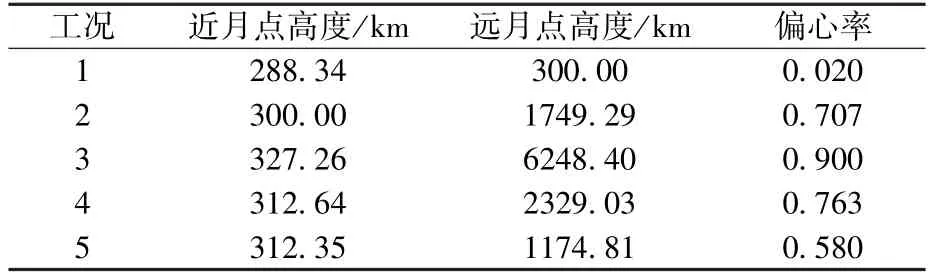
表2 不同工况下轨道数据Table 2 Orbital data under different conditions
任务全过程中,由于对接时相对速度控制为零,且二体模型下没有考虑扰动,所以,旋转平台的自转角速度始终保持不变,且平台自转平面始终在轨道平面内。旋转平台质心运行轨道的轨道倾角、升交点赤经等保持不变,且平台始终位于月球的引力球范围内。
4.4 技术挑战
1)先进的绳系材料与加工技术
高强度吊绳的材料制备、结构加工、空间防护、缠绕释放等都需要最前沿的技术发展。
2)大型环月载人旋转平台构建技术
“秋千式”旋转平台是一种全新的空间站理念,且需要环月部署。
3)快速交会对接和空间组装技术
勾环式交会对接和魔方式吊装结构方案,离具体实现还有很长的路要走。
4)月面单级往返运输飞行器技术
涉及到亚轨道飞行、月面软着陆、可重复使用等技术,需要在现有航天器技术基础上有所发展。
5)大型环月载人旋转平台使用维护技术
涉及到平台补给、维修、轨道和姿态维持、任务调度规划等一系列问题。
6)新型返回舱技术
需要支持3~4人、5天左右单舱独立飞行,和目前典型的三舱、两舱载人航天器构型有较大差异。
5 发射成本分析
5.1 发射质量
发射质量的节省主要体现在双舱奔月单舱返回的方式中。
旋转平台的搭建共有4次发射任务,发射质量分别为 24 t、24 t、8 t、8 t。 经过 4 次发射后,旋转平台就已经搭建完成,且2个可重用登月舱已经分别布置与平台两端。之后进行的载人登月任务,单次任务的发射质量为12 t。参考阿波罗任务中Apollo 11号45.7 t的单次载人登月任务发射质量[1],采用本方案进行2次载人登月任务时,总发射质量约为88 t,而采用Apollo 11进行2次任务,总发射质量达90 t以上;同时,在后续载人登月任务中,单次发射质量始终控制在12 t左右,即单次发射质量可减小至Apollo 11的1/3以内。
5.2 速度增量
速度增量的节省主要体现在利用旋转平台完成月面下降/上升过程以及地月/月地转移过程中。
月面下降/上升任务利用旋转平台的近月端对接或释放单级登月舱,平台质心绕月球运行的速度约为1550 m/s,而平台两端相对平台质心的速度约为1250 m/s,所以登月舱进行月面上升或下降任务时,考虑到交会对接和一定的机动能力,速度增量只需500 m/s。再考虑传统的阿波罗方案,指挥舱所在的环月轨道高度约为110 km,对应的登月舱速度增量需1200 m/s[1]。因此,借助旋转平台完成登月任务时,月面下降/上升的速度增量需求能降低至阿波罗任务的1/2以上。
进行地月/月地转移任务时,利用旋转平台的远月端对接地月飞行器或释放返回舱。按照前文的参数设定,平台远月端相对于月球的速度可达到2800 m/s,基本达到月球逃逸速度。因此,借助旋转平台完成登月任务时,可以认为基本不需要近月制动和月地返回速度增量。
6 结论
1)旋转平台搭建完成后,单次任务的发射质量控制在12 t左右,相比于阿波罗计划中45 t左右的质量,可将发射质量减小至阿波罗飞船的1/3以内。
2)借助旋转平台完成登月任务时,基本不需要近月制动和月地返回速度增量,月面上升速度增量需求也能降低1/2以上。
3)可重用旋转平台、可重用月面单级往返飞行器的设计能够有效增加任务次数,充分提高任务的经济性。
4)旋转平台中绳的强度以及平台自身轨道运行具备可行性,且有一定的安全余量。
猜你喜欢
军事文摘(2022年12期)2022-07-13
新长征·党建版(2021年11期)2021-11-12
建材发展导向(2021年7期)2021-07-16
科学与财富(2021年34期)2021-05-10
大众科学(2021年1期)2021-04-23
军民两用技术与产品(2021年10期)2021-03-16
太空探索(2018年7期)2018-07-05
航空知识(2017年11期)2018-04-16
