
浅析海上水面自主船舶(MASS)四层级分类下的航标船舶智能化发展
2019-08-30 05:39郑国旺孔富镔颜昊刘孜涵
航海 2019年4期
郑国旺?孔富镔?颜昊?刘孜涵

摘 要:本文从国际海事组织对海上水面自主船舶层级划分出发,结合当前航标船舶航行作业、智能船舶技术的发展现状及问题,通过论述MASS四层级划分下航标船舶“标准先行,改造为主,梯次推进”的智能化发展思路,以及对关键技术的简要分析,从服务航海保障事业的角度,客观简要地分析了不同自主层级航标船舶智能化发展所需经历的阶段及相关软件、硬件支撑。
关键词:海上水面自主船舶;自主层级;航标船舶;智能化发展
1 海上水面自主船舶(MASS)综述
1.1 MASS的概念及层级划分
海上水面自主船舶(Maritime Autonomous Surface Ships,简称MASS)是指在不同程度上可以独立于人员干预运行的船舶。2018年5月,在伦敦举行的国际海事組织海事安全委员会(MSC)第99次会议上,国际海事组织(IMO)提出了自主程度的初步定义,将自主船的划分为以下四个层级[1]:
(1)船舶具有自动化程序操作和决策支持的功能;
(2)船舶具备远程遥控的功能,同时有船员在船;
(3)船舶具备远程遥控功能,无船员在船;
(4)船舶完全自主。
为方便开展论述,本文将上述四个层级按照顺序依次分为自主I级、自主II级、自主III级、自主IV级。
1.2 自主与智能
从一般意义上讲,自主与智能是两个不同范畴的概念。自主是指能够自己做出决策并决定行动的船舶和/或船上具有控制功能的系统。自主表达的是行为方式,由自身决策完成某行为则称为“自主”;智能则是完成行为过程的能力,也就是运用的方式方法以及策略是否符合自然规律或符合人(或某团体)的行为规则,在千变万化的环境中找到合理的“路径”完成某项任务,则称为是智能的[2]。对于航标船舶来说,由于其航行与作业的特殊性,在MASS四层级分类下探讨自主与智能两者之间的关系应该是:智能在前,自主在后,两者相辅相成,因此本文将从自主I-IV级分别对应航标船舶不同的智能化程度来展开分析。
2 航标船舶的发展现状及相关问题
2.1 航标船舶综述
航标船是指设有起放航标的起重机和绞盘等设备,在航道与其附近的暗礁、浅滩、岩石处进行航标布设、巡检、补给、修理、维护作业的船舶。我国现役航标船中主要船型有大、中型航标布设船和小型航标巡检船。大型航标船主要承担海区活节式灯桩及大中型浮标的更换和维护任务;中型航标船主要承担区域性中小型浮标的布设和巡检维护任务;小型航标巡检船主要承担港区及附近水域航标的日常巡检维护工作[3]。
2.2 航标船舶作业模式
近年来,船舶工业的发展使得航标船舶的机械化水平显著提高,海上航标的作业模式也随之发生改变。从最初的“跳标”检查维护到现在的侧向推进装置、动力定位、襟翼舵、起重机、绞盘、夹持臂、弃链器、制链器、电磁吸盘、机械臂手等航标船舶专用设备设施的应用,航标船舶的作业模式也已从“人力主导”的传统作业模式逐渐转变为“人力主导-船舶简单协作”的半机械化作业模式,极大地保障了人员的作业安全,减轻了作业人员的劳动强度。
2.3 存在的问题
航标船舶作业模式的转变虽然有效提升了作业效率,但从船舶航行角度以及目前“人力主导-船舶简单协作”的半机械化作业模式角度出发,问题依然存在。一是船型老旧。我国现役航标船船型大多为传统船型,船舶抗风浪能力、耐波性较弱,恶劣的海况下作业安全无法保证。二是船舶操纵性能差。航标船舶大多航行在交通流量大、海况复杂的水域,且大部分航标船舶推进方式为主机直接驱动螺旋桨,船的低速性和操纵性能差、不能满足航标作业的特殊需要。三是作业机械化程度差。姑且不谈航标专业设备的普及应用情况,在航标作业中,除用吊机的起重能力和绞盘拉力外,大量的海上航标作业的辅助工作如排链、弃链、挂标、检视、摆向控制、浮标灯器拆卸更换等辅助工作依然需要人力操作协同完成,不仅劳动强度大,还存在较大安全隐患。
3 当前智能船舶发展现状
物联网、大数据、云计算等新理念、新技术突飞猛进的发展,为船舶自主、智能技术发展注入了更强大的动力,智能船舶逐步成为国内外研究的热点[4]。
3.1 国外发展现状
美国船级社(ABS)在2014年3月批准了一艘2 200 m3的无人驾驶液化天然气驳船的建造,用于美国沿海水域船对船的LNG转运或LNG散装运输。2016年7月,英国劳氏船级社(LR)发布了智能船舶入级指导文件,基本囊括了自动化船舶入级的各个方面。挪威船级社(DNV-GL)也正在对采用电力推进的无人驾驶船沿挪威海岸线进行货物运输的可行性进行研究。
欧盟于 2012 年由 Fraunhofer海运物流和服务中心领导开展MUNIN(Maritime unmanned navigation through intelligence in network)项目,从技术、经济和法律三个方面,对海上大型无人驾驶商用散货船的运行可行性进行了评估。罗尔斯罗伊斯公司(Rolls-Royce Marine)在2016 年公布了其高级无人驾驶船舶应用开发计划(AAWA),公开了用在无人驾驶船队远程监控上的岸基操作控制中心的构想,并与瑞典渡船公司 Stena Line AB 合作研发了船舶智能感知系统。日本于2014年1月至2017年3月启动“智能船舶应用平台项目”(SSAP),由日本船舶机械与设备协会(JSMEA)牵头,联合多家造船、配套、航运和检验单位共同参与,旨在建立船舶及岸上获取船舶设备数据的标准化方法,不断提高船舶的安全性与环保性[5]。
3.2 国内发展现状
2015年5月,我国提出《中国制造2025》战略计划,为智能船舶的发展指明了方向;中国船级社(CCS)在2016年3月生效《智能船舶规范(2015)》,在2018年10月发布《自主货物运输船舶指南》;2018年12月,工业和信息化部、交通运输部、国防科工局联合发布《智能船舶发展行动计划(2019—2021年)》,明确了船舶智能化发展的总体思路和重点任务。
2017年12月5日,我国自主研制的全球第一艘通过英国劳氏船级社和中国船级社认证的智能船舶“大智”号在上海正式交付使用。2018年11月,由中国船舶工业集团有限公司所属上海外高桥造船有限公司为招商局能源运输股份有限公司量身订造的全球首艘40万吨智能超大型矿砂船(VLOC)“明远”号在上海命名交付。2019年2月,在巴塞罗那举行的世界移动通信大会上,珠海云洲智能携手爱立信、中国移动公司打造的5G无人船亮相,实现了高清视频实时回传、VR后端演示、无人船舶远程控制、远程控制污水精准取样等功能,引发外界关注。
以目前的智能船舶发展形势,不难预见,未来 30 年内自主船、智能船将彻底改变船舶设计、建造和运营的格局。航标船舶也应顺应时代大潮,在现有的船舶智能技术的基础上,按照IMO对MASS的层级划分逐步完成智能及自主发展。
4 MASS四层级分类下的航标船舶智能化发展思路
从IMO对MASS的层级划分不难看出自主船的发展是逐步和阶段性的。航标船舶的自主化进程也应是分层次、逐步、阶段性地开展。相比于远洋船舶,航标船舶大多航行于近海港区,种类多,作业环境交通流量大、作业内容复杂。
基于上述航标船舶的作业特殊性,其自主化程度发展应以航标船舶设备的机械化、智能化水平为出发点,兼顾海上航标作业模式的自主化展开,按照“标准先行、改造为主、梯次推进”的方式,即以应用标准为基础,以改造为主要手段,根据各类航标船舶的航行作业特点统筹兼顾有针对性地制定发展策略,推动航标船舶智能化发展。
4.1 量体裁衣,标准先行
适合航标船舶自主化发展的标准或规范性文件是自主航标船舶建造并投入使用的基础。我国现有规范标准发展尚在起步阶段,围绕智能船舶所涉及的信息感知、通信导航、能效控制、自主航行等关键技术,目前国内现有可供参考的技术标准主要是中国船级社(CCS)在2016年3月正式生效的《智能船舶规范(2015)》[6]和2018年10月发布的《自主货物运输船舶指南》,而《智能船舶发展行动计划(2019—2021年)》[7]明确将按照“分类实施,梯次推进”的基本原则,积极推进智能船舶规范、基础通用标准、船载系统标准、岸基系统标准、网络和信息安全标准、测试与验证标准等智能船舶规范标准体系的建立,因此不难预见,针对自主航标船舶的相关指南或其他具有普适性的指导性标准将会很快出现。
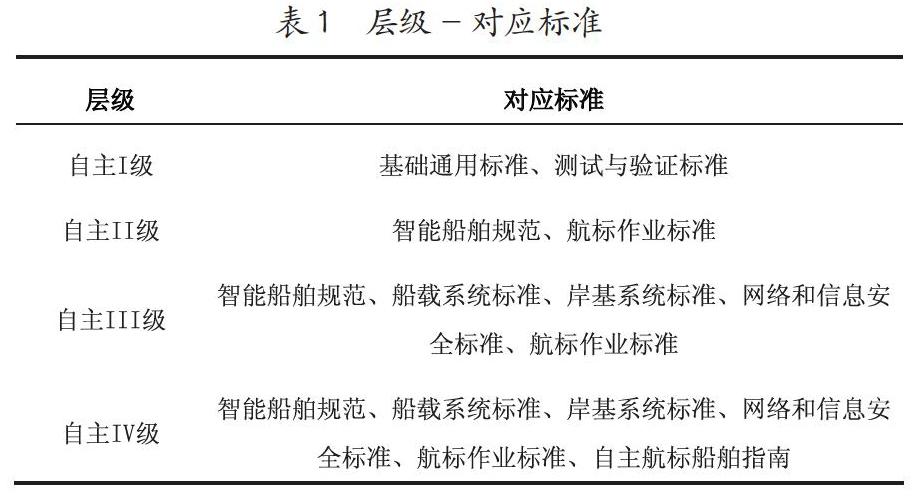
需要注意的是,针对自主航标船舶的標准不应只局限于自主航标船的建造。基于自主航标船服务航海保障工作的事实,自主航标船舶的发展应按照自主化层级的不同细化应用标准,并兼顾航海保障的一系列行业执行标准,“量体裁衣”才能更符合航海保障工作发展需要。层级与对应标准如表1所示:
4.2 由简至繁,改造为主
船舶设备智能化程度的提高是航标船舶自主层级提高的前提。对于航标船舶来说,设备智能化程度的提高同样意味着航标作业模式的改变。相比于直接建造一艘自主II级或以上的航标船舶,技术改造成本低,对现有航标船舶设备的逐步改造和智能升级与当前相对落后的半机械化作业模式更匹配,经济性、实用性更好。因此,通过船舶技术改造以提高航标船舶设备的智能化水平在未来一段时间内仍是航标船舶自主化发展的主要方式。层级与对应层级设备改造水平如表2所示:
4.3 由小至大,梯次推进
我国现役航标船舶因承担作业性质的不同分为大、中、小三种航标船舶。大型航标船(2 000吨级)、中型航标船(800~1 200吨级)主要承担浮标的更换和维护任务;小型航标巡检船(拖轮、航标夹持船、17 m级钢质艇)主要承担航标拖带、日常巡检维护工作。基于航标船舶作业环境复杂、大中型航标船作业过程中对船舶航行作业稳性、作业精确程度的高要求、小型航标船对作业效率及故障解决的高要求,结合智能船舶技术发展尚处于起步阶段的实际,建议航标船舶自主化在相当一段时间范围内按照功能对应层级的模式发展。层级相对应的航标船舶类型如表3所示:
5 自主航标船舶智能化发展的关键技术
按照自主I-IV层级分类,自主航标船舶可通过对航标船舶的动力机电、通信与导航、靠离泊、航标作业操作、舱室设备等现有设备系统的智能化改造逐步升级船舶的智能程度。航标船舶的自主化升级应重点围绕船舶感知、航行控制、作业控制、网络通信、船舶安保等智能模块系统的构建及整合进行开展(如图1所示)。
5.1船舶感知
通过应用物联网技术、传感器信息融合技术、大数据技术、船载摄像机稳像技术、海面红外与可见光图像融合技术、海面弱小目标检测技术、海面目标模式识别等关键技术对航行环境、船舶状态、设备状态、尤其是航标状态等重要数据进行采集、交互、融合、分析,辅助船舶操纵、航标作业控制决策。
5.2 航行控制
通过应用船舶自主气象导航技术、船舶避碰、避礁和防搁浅一体化技术以及航海信息的智能处理技术、基于态势感知的智能航行技术、船岸协同下的远程遥控驾驶技术等关键技术,实现为航标船舶在近海港区等交通流量大、情况复杂的水域进行航行、航标作业提供科学、自主、安全、高效的决策[8]。
5.3 作业控制
通过应用船舶动态定位、动载平衡技术、自动排链、脱钩技术、浮标追踪夹持技术、灯器自动检修技术、材料检测等关键航标作业技术对航标作业进行智能化控制。
5.4 网络通信
通过应用船域网、船岸交互、船舶海上自组网、5G移动通讯、卫星通讯技术、智能路由选择技术、数据智能压缩技术、船岸一体化信息集成与融合技术等关键技术,实现自主航标船舶低延时、低成本、小功耗、数据轻量化传输的船-岸、船-船、船-标通信系统的建立。
5.5 船舶安保
对于航标船舶来说,船舶的安保主要集中在航行作业安全、消防、网络与通讯安全等方面,可通过应用远程监测技术、故障诊断技术、船 岸-港、船-船、船-标和船舶内部网络和数据链路抗干扰、防阻断、反窃听技术、数据加密、防篡改、数据恢复技术、硬件加固技术等安全防护技术保障自主航标船舶安全。
6 结束语
IMO对MASS的四层级分类为航标船舶智能化发展提供了理论基础。按照目前的船舶智能化总体发展水平,航标船舶的智能发展应在现有MASS四层级分类的框架下找准出发点,以应用标准为基础,以改造为主要手段,根据各类航标船舶的航行作业特点有针对性地制定发展策略。同时结合航标船舶服务航海保障的实际,按层级、分类别地构建航标船舶海上作业规范等理论体系,在感知、信息、控制、等关键智能技术的研究应用方面形成长期规划,并对其航行及作业的可靠性和稳定性进行长时间真实环境下的反复测试,才能逐步提高航标船舶的智能化水平。虽然这个阶段可能需要经历十年或更多时间,但不可否认的是,随着船舶智能技术的快速发展和应用,自主航标船舶的出现必将会对海上航海保障工作产生积极深远的影响。
参考文献
[1] 中国船级社.自主货物运输船舶指南(2018)[M].北京:人民交通出版社,2018:1-72.
[2] 范彦铭.无人机的自主与智能控制[J].中国科学:技术科学,2017,47(3):221-229.
[3] 陈英俊,孟淑媛,赵福波.航标船技术现状与创新研究[J].中国海事,2010,10:57-60.
[4] 苏士斌,刘英策,林洪山,伍蓉晖,周晓莹.无人驾驶运输船发展现状与关键技术[J].船海工程,2018,47(5):56-59.
[5] 范维,许攸.日本率先拉开“智能船舶”国际标准化战略序幕[J].船舶标准化与质量,2015,4:39-40.
[6] 中国船级社.智能船舶规范(2015)[M].北京:人民交通出版社,2017:1-45.
[7] 工业和信息化部,交通运输部,国防科工局.智能船舶发展行动计划(2019-2021)[Z].工信部联装〔2018〕288号.北京,2018:1-9.
[8] 高宗江,张英俊,孙培廷,李文华.无人驾驶船舶研究综述[J].大连海事大学学报,2017,43(2):1-7.
