
航空发动机模糊自适应PID控制系统仿真研究
2019-09-03 07:45孙晓楠
自动化与仪表 2019年8期
杨 坤 ,孙晓楠 ,张 正
(1.中国民航大学 适航学院,天津 300300;2.中国民航大学 航空工程学院,天津 300300)
航空发动机是一个结构复杂、强非线性的被控对象,并且有着宽广的飞行包线,随着发动机进口环境条件的等参数的变化,其时间常数和增益系数也会随着变化,呈现出较强的时变性。设计航空发动机控制器使其能安全运行且达到期望的性能是发动机控制的关键问题[1]。常规PID控制是发展较早的经典控制方法之一,因具有结构简单、技术成熟、稳定性好等优点被广泛应用于工业控制中[2]。但常规PID控制难以解决被控对象数学模型复杂、非线性以及时变不确定性等系统问题。针对上述问题,随着控制理论的发展,出现了PID控制器参数的自适应技术,如专家系统、神经网络、模糊逻辑、灰色理论、遗传算法等,这些算法和经典的PID控制相结合,产生了新型的智能控制器,使PID控制器的控制效果得到改善,以适应复杂的工况和高指标的控制要求。
模糊控制本身是一种非线性控制方法,工作范围宽,不依赖于系统精确的数学模型,可以较好地适应发动机系统的非线性和时变性,具有很强的适应性[3]。因此,本文将模糊控制和PID控制结合起来,利用该方法对PID控制参数进行在线调整形成模糊自适应PID控制器,同时模拟航空发动机转速传感器恒偏差故障加入由航空发动机和模糊自适应控制器组成的控制系统中,来研究仿真结果。把PID控制的简便性与模糊控制的灵活性以及鲁棒性融为一体,发挥了PID控制与模糊控制的各自长处,既可以使PID控制系统更好地适应发动机的非线性和时变性,又可以继承定参数PID系统的稳定性。
1 常规PID控制原理
常规的PID控制就是将设定目标值与反馈值之间偏差的比例、积分和微分结果通过线性组合生成控制量,从而对被控对象进行控制[4]。常规PID控制算法如下:

系统结构如图1所示。

图1 常规PID控制框图Fig.1 Regular PID control block diagram
图 1 中,r(t)为输入信号,e(t)为偏差信号,u(t)为控制信号,y(t)为被控制系统输出信号。其中,设定值 r(t)与被控实测值 y(t)构成控制偏差信号 e(t)=r(t)-y(t)。 Kp为比例系数,Ki为积分系数,Kd为微分系数,Ti为积分时间常数,Td为微分时间常数。控制信号 u(t)如下:
对于比例控制P,令Ki=Kd=0,可得:

对于积分控制I,令Kp=Kd=0,可得:

对于微分控制D,令Ki=Kd=0,可得:

2 PID控制器参数自整定原则
PID参数模糊自整定是先找出PID控制器的3个参数Kp、Ki和Kd与偏差e和偏差变化率ec之间的模糊关系,在运行中通过不断检测e和ec,根据模糊控制规则来对3个参数进行在线修改,以满足e和ec对控制器参数的不同要求,从而使被控对象具有良好的动态和静态性能。
比例系数Kp的作用在于加快系统的响应速度,提高系统调节精度。积分系数Ki的作用在于消除系统稳态误差。微分系数Kd影响系统的动态特性[5]。根据参数Kp,Ki,Kd对系统输出特性的影响情况,可归纳出系统在被控过程中对于不同的偏差和偏差变化率,参数 Kp,Ki,Kd的自整定原则:
(1)当偏差较大时,为加快系统的响应速度,防止因开始时偏差的瞬间变大可能引起的微分过饱和而使控制作用超出允许范围,应取较大的Kp和较小的Kd。另外为防止积分饱和,避免系统响应出现较大的超调,Ki值要小,通常取Ki=0;
(2)当偏差和变化率为中等大小时,为使系统响应的超调量减小和保证一定的响应速度,Kp应取小一些。在这种情况下Kd的取值对系统影响很大,应取小一些,Ki的取值要适当;
(3)当偏差较小时,为使系统具有较好的稳态性能,应增大Kp,Ki值,同时为避免输出响应在设定值附近振荡,以及考虑系统的抗干扰能力,应适当选取Kd,其原则是:当偏差变化率较小时,Kd取大一些;当偏差变化率较大时,Kd取较小的值,通常Kd为中等大小[6]。
3 模糊自适应控制器设计
3.1 模糊自适应PID控制原理
自适应模糊PID控制器以误差e和误差变化率ec作为输入,可以满足不同时刻的e和ec对PID参数自整定的要求。利用模糊控制规则在线对PID参数进行修改,便构成了自适应模糊PID控制器,其结构如图2所示[7]。

图2 模糊PID控制结构图Fig.2 Fuzzy PID control structure
3.2 定义论域和语言变量
采用控制系统的一般设计原则,将输入误差e及其变化率ec归一化,再以此作模糊化处理,即将{-3,-2,-1,0,1,2,3} 定义为输入量和输出量在模糊集上的论域,再定义7个语言变量值描述输入量的大小:NB(负、较大),NM(负、适中),NS(负、较小),ZO(零),PS(正、较小),PM(正、适中)、PB(正、较大), 并选取-3,-2,-1,0,1,2,3 作为 7 个论域上的模糊子集的中心元素,即当 x=-3,-2,-1,0,1,2,3时,隶属函数值u(x)=1。经模糊化处理,生成相应的模糊变量E和EC。
3.3 确定隶属度函数
在FuzzyToolbox的隶属度函数编辑器中,选择输入量E、EC隶属函数为高斯型(gaussmf),输出的隶属函数为三角形(trimf),如图3所示。
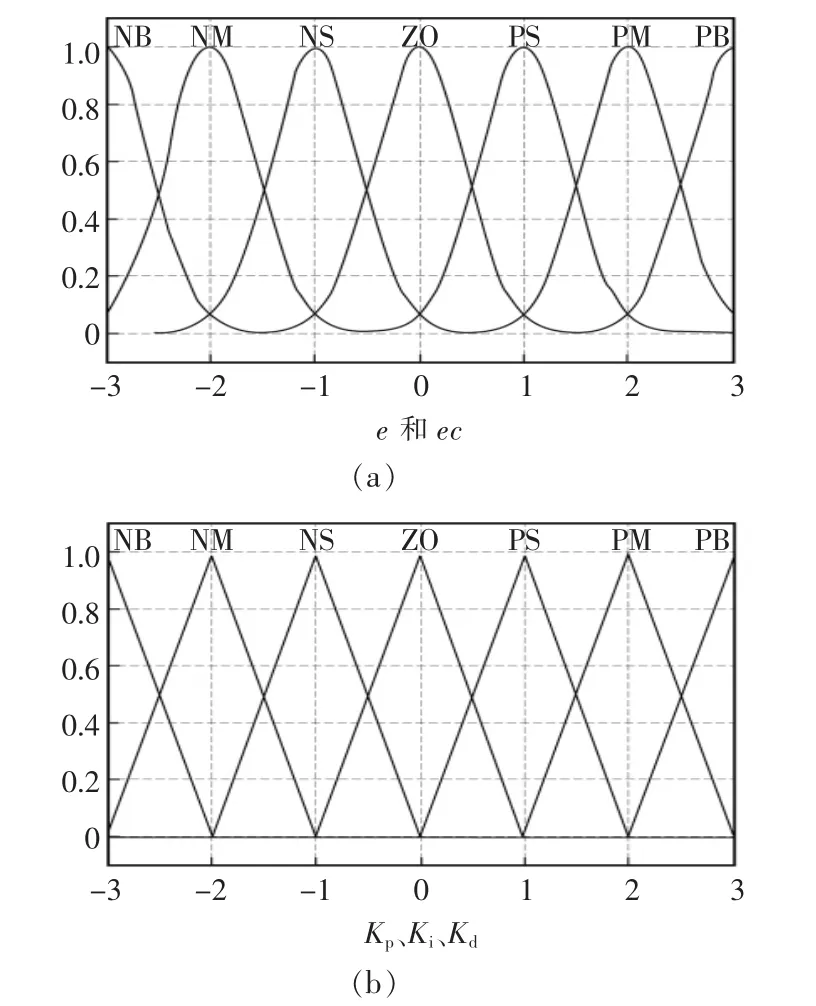
图 3 e、ec、ΔKp、ΔKi、ΔKd隶属度函数Fig.3 e、ec、ΔKp、ΔKi、ΔKdmembership function
3.4 模糊控制规则
根据参数Kp,Ki和Kd对系统输出特性的影响情况,可以归纳出在不同的e和ec时,被控参数Kp,Ki和Kd自整定要求,建立合适的模糊规则表,根据 PID参数调整原则得到输出变量 ΔKp、ΔKi、ΔKd的控制规则如表1所示[8]。

表 1 ΔKp、ΔKi、ΔKd的控制规则Tab.1 Control rules for ΔKp,ΔKi,ΔKd
从表1可以得出以下49条模糊控制规则:
1.If(e is NB)and(ec is NB)then(Kpis PB)(Kiis NB)(Kdis PS)
2.If(e is NB)and(ec is NM)then(Kpis PB)(Kiis NB)(Kdis NS)
3.If(e is NB)and(ec is NS)then(Kpis PB)(Kiis NB)(Kdis PS)
……
49.If(e is PB)and(ec is PB)then(Kpis NB)(Kiis PB)(Kdis PB)
在Matlab命令窗口运行Fuzzy进入模糊逻辑编辑器,并建立一个新的FIS文件,选择控制器类型Mamdani,根据上面的分析分别输入 e、ec、ΔKp、ΔKi、ΔKd的隶属函数和量化区间,可得到双输入-三输出控制器。 ΔKp、ΔKi、ΔKd分别在论域上的输出曲面如图4所示。


图 4 ΔKp、ΔKi、ΔKd论域上的输出曲面Fig.4 ΔKp、ΔKi、ΔKdoutput surface on the domain
4 模糊自适应PID控制系统仿真
在Matlab的Simulink环境下根据图2设计系统的仿真框图,建立Fuzzy logic controller模块,在这个基础上加入量化因子 Ke,Kec,K1,K2,K3。 其中:Ke,Kec为模糊化因子,K1、K2和 K3为解模糊因子。Kp、Ki、Kd为初始值。把模糊控制器和PID控制器封装在一起,组成Fuzzy-PID控制器。模糊自适应系统设计仿真框图如图5所示。
4.1 模拟转速传感器故障
传感器恒偏差故障仿真可以通过叠加一个恒定的数值来实现,故障发生后的数学公式可以表示为y=y+Δy。其中Δy为偏差量,在故障发生时刻前为0。国内外学者在做航空发动机传感器故障诊断或者容错等问题时均模拟故障低于10%,因此本文在转速调节过程中的2 s(已达到稳态)时和8 s时分别加入恒偏差8%的故障。对应故障注入结构图如图6所示。
4.2 仿真结果

图5 模糊自适应系统设计框图Fig.5 Fuzzy adaptive system design block diagram

图6 转速恒偏差故障注入结构图Fig.6 Rotating speed constant deviationfault injection structure
本文以航空发动机地面慢车状态控制器设计为例说明模糊自适应PID控制过程,其中被控对象传递函数是通过拟合法建立的航空发动机状态变量模型转换得到的,其传递函数为模糊化因子 Ke=0.9,Kec=0.1,解模糊因子 K1=3,K2=1.2,K3=0.01,PID 初始值为 Kp=5,Ki=2,Kd=1.2,采样周期T=0.01 s。常规PID控制曲线和模糊PID控制曲线仿真结果如图7所示。在2 s和8 s时分别加入转速传感器恒偏差故障后的仿真结果如图8和图9所示。仿真结果表明,对于航空发动机的非线性和时变性,模糊自适应PID控制方法较常规的PID控制具有较高的控制精度,超调量小,调节时间短,控制效果好,具有更好的自适应能力。
5 结语
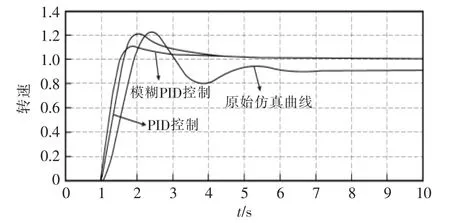
图7 转速闭环阶跃响应图Fig.7 Speed closed-loop step response diagram
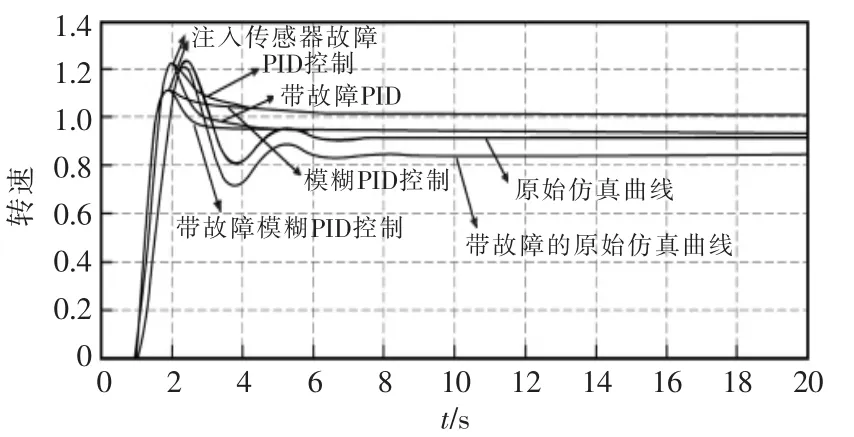
图8 2 s时注入传感器故障转速响应图Fig.8 Injection sensor failure speed response diagram at 2 seconds

图9 8 s时注入传感器故障转速响应图Fig.9 Injection sensor failure speed response diagram at 8 seconds
本文在分析了常规PID控制器原理和基本模糊控制器原理的基础上,以整定PID参数的工程经验为基础,基于控制器输入误差及其变化率,采用模糊推理机制设计了模糊自适应PID控制器,实现了PID参数的在线整定功能。同时模拟了转速传感器由于短路或者振荡引起的恒偏差故障加入控制系统,结合通过拟合法建立的航空发动机地面慢车时的状态变量模型转换得到的传递函数模型进行仿真,对比常规定参数PID控制,系统的调节时间短、超调量小、稳态性能变好,具有较强的鲁棒性和更好的自适应能力,为模糊自适应PID在航空发动机控制系统中的应用提供了方法验证。
猜你喜欢
湖南电力(2021年4期)2021-11-05
成都信息工程大学学报(2021年6期)2021-02-12
初中生世界·九年级(2020年9期)2020-09-21
环球时报(2020-08-11)2020-08-11
电子制作(2019年16期)2019-09-27
火力与指挥控制(2016年8期)2016-09-21
电子制作(2016年21期)2016-05-17
中学生理科应试(2014年12期)2015-01-15
汽车零部件(2015年5期)2015-01-03
