
高层建筑玻璃清洗机的结构设计
2019-09-10 04:41王会张倩倩
河南科技 2019年2期
王会 张倩倩
摘 要:本文设计了一种能在玻璃上吸附行走的单片机控制、自主移动的清洗机,简单介绍了清洗机的国内外研究现状,阐述了清洗机的机械结构部分。结果表明,该清洗机具有结构简单、容易控制、便于携带以及清洗效果好的特点。
关键词:清洗机;机械结构;移动结构;吸附结构;驱动系统
中图分类号:TP242 文献标识码:A 文章编号:1003-5168(2019)02-0092-02
Design of Tall Building Glass Cleaner
Abstract: In this paper, a single chip microcomputer controlling and autonomous moving cleaning machine was designed which could be used to absorb and walk on glass. The research status of cleaning machine at home and abroad was briefly introduced, and the mechanical structure part of cleaning machine was designed . The cleaning machine has the characteristics of simple structure, easy to control, easy to carry and good cleaning effect.
Keywords: cleaning machine;mechanical structure;mobile structure;adsorption structure;drive system
目前,各个城市都在为创建卫生城市而努力,高层建筑已成为城市面貌的主要部分。如何快速干净地打扫高层建筑的玻璃,降低清洁工人的劳动强度,避免人工操作的安全事故,是机械工作者需要重点关注的研究课题。本设计采用的动力供给装置是在机器的顶部覆盖太阳能电池板,将太阳能转换成电能并储存在锂电池内,为清洗机工作提供动力。此外,清洗机有外部接口,连续阴天时可通过外部电源充电。
1 清洗机总体方案设计
1.1 设计思路
清洗机的整体形状为圆盘形,运动装置和吸附装置是模仿壁虎爬行动作设计的。壁虎一条腿的运动动作在一个周期内可分解为支撑阶段和摆动阶段。当一条前腿和对侧的后腿处在支撑阶段时,另一对前后腿处在摆动阶段,往复一次,完成一个迈步动作。清洗机采用4个曲柄滑块机构模仿壁虎的腿,采用强力吸盘模仿壁虎的爪子。强力吸盘采用三吸盘结构形式,以增大吸附力,避免壁面凸凹不平时,单个吸盘出现漏气导致的吸盘吸附力下降和整体承载能力降低,从而提高吸附结构的可靠性。底部的可拆装细毛刷、抹布及垃圾收集装置,会在清洗机行走过程中擦拭玻璃上的灰尘和杂质,达到清洗的目的。
1.2 总体设计方案
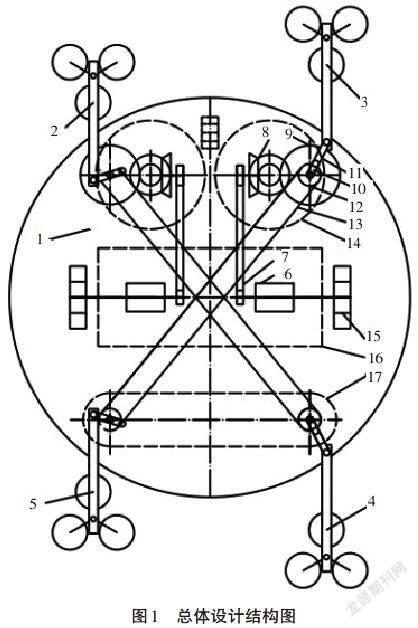
清洗机的整体设计图如图1所示。太阳能电池板可将太阳能转换成电能,为清洗机提供动力。底板上面的右侧电机转动,带动V带传动,并带动直齿圆锥齿轮传动。转动将垂直面的转动转变为水平面的直齿圆柱齿轮传动,然后通过与齿轮同轴的曲柄和连杆驱动右前侧吸盘向前运动。同时,通过与齿轮同轴的同步带轮和同步带将动力传递给左后侧曲柄滑块机构的吸盘,使其向后运动。左侧电机传递给直齿圆柱齿轮的转速方向与右侧齿轮相反,因此左前侧吸盘、右后侧吸盘的运动方向与吸盘、吸盘方向反向。当左前侧吸盘和右后侧吸盘处于支撑阶段时,另一对前后吸盘处于摆动阶段,往复一次,完成一个迈步动作。底板下面的结构包括可拆装细毛刷、抹布及垃圾收集装置,可在清洗机行走过程中擦拭玻璃灰尘。
1.3 总体设计要求
1.3.1 外观设计。由于人们对机器外观的要求越来越高,本机器在完成预想功能的前提下,将设计时尚、美观的外形,以吸引消费者眼球[1]。
注:1.太阳能电池板;2.左前侧吸盘;3右前侧吸盘;4.左后侧吸盘;5.右后侧吸盘;6.电机;7.V带传动;8.锥齿轮传动;9.直齿齿轮传动;10.曲柄;11.连杆;12.同步带轮;13.同步带;14.毛刷;15.驱动轮;16.垃圾收集装置;17.抹布装置。
1.3.2 材料选择。由于清洗机需在玻璃上工作,所选材料必须满足高强度、低质量的要求。本设计考虑材料的许用应力,保证选择的材料达到预定的安全系数。因此,材料选用硬质塑料。
1.3.3 经济性设计。本机器进行反复试验及优化设计,在满足预想功能的前提下,使机构最简洁、用料最省,以减少成本、节约能量。
2 清洗机清洗机械结构设计
根据清洗机的运动情况和工作状况,采用可调速电机型号TE 2-90L-6,功率为1.5kW,转速为940r/min,电机主轴轴径为24mm,底座孔距为140mm×125mm,中心高值为90mm。
2.1 清洁机爬行装置的设计
壁虎不但能在光滑的墙壁上行动自如,还能在天花板上运动,其强大吸盘具有重要作用。在一个周期内,壁虎的一个脚抬起,另一只脚支撑,此周期性运动达到了预定的运动效果。因此,太阳能机器运动方式采用仿生学壁虎运动方式,其中吸盤是太阳能清洁机器的重要组成部分,可使其贴于墙壁和玻璃行走,达到清洁的目的。
2.2 曲柄滑块机构的设计
2个电机通过V带传动,带动直齿圆锥齿轮和直齿圆柱齿轮传动,分别将方向相反的动力传递给前面2个曲柄滑块机构的曲柄,然后通过同步带传动,分别将动力传递给后面2个曲柄滑块机构的曲柄,最后4个曲柄滑块机构通过连杆带动4个滑块即强力吸盘模仿壁虎的爬行动作。滑块的往复运动速度应一致,所以曲柄滑块机构无急回特性,应设计为对心曲柄滑块机构。当曲柄和连杆2次共线时,滑块处于2个极限位置,二者之间的距离即行程H为2倍的曲柄长。又因为曲柄滑块的行程是每次的步伐距离,可得行程[H=200mm],曲柄长[R=100mm]。考虑其他辅助条件,设[K=LR],一般[K=2~5],此处[K=3],可确定连杆长[L=300mm]。
3 清洗机控制系统的设计
根据太阳能清洁机器的整体机构,太阳能电池板的外形设计为锅盖形,其接收太阳光照的能力增加35%,给清洗机提供了足够的动力[2]。
清洗机的控制系统是提高机器系统整体可靠性和实用性的关键,主要任务是通过控制盒完成自动作业和手动操作。控制系统的设计要求应满足系统可靠、结构简单轻便及便于维护。控制系统硬件选用AT89S52单片机、扩展的MAX485通信芯片、看门狗电路、脉冲速度检测电路、收发缓冲器、按键中断输入及光耦隔离。为提高清洗机的自动化程度,在控制系统硬件部分增加了传感器,用于分辨墙面的材料,从而远程控制清洗机的运动。这里选用德国TURCK公司生产的超声波传感器,其特点是有效作用距离大,与被测物的颜色和所在环境无关,并具有开关量和模拟量两种输出,有利于控制。
4 结语
本文对清洗机的机械结构部分进行了详细设计,所提设计能降低劳动者的工作强度和难度,适用于高层建筑的玻璃清洗。同时,清洗机的机械结构简单,便于携带,清洗效果好,市场推广空间较大。
参考文献:
[1]唐建祥.高楼壁面清洗机器人的研究与设计[D].邯郸:河北工程大学,2017.
[2]于今,刘雪飞.一种新型爬壁机器人研究[J].液压与气动,2010(10):52-59.
猜你喜欢
电脑报(2021年40期)2021-11-01
电子乐园·下旬刊(2021年2期)2021-11-01
科学与技术(2018年8期)2018-04-26
中国高新技术企业(2017年2期)2017-03-24
山东工业技术(2016年24期)2017-01-12
佛山陶瓷(2016年12期)2017-01-09
科技传播(2016年19期)2016-12-27
科学与财富(2016年28期)2016-10-14
科技视界(2016年8期)2016-04-05
女友·家园(2016年2期)2016-02-29
