面向多项式的智能车变道轨迹规划方法
2019-09-10 02:38罗哲杨柳曼
现代信息科技 2019年17期
罗哲 杨柳曼
摘 要:本文采用轨迹规划算法,以时间作为主要目标参数,根据不同车辆的变道环境和条件,进行变道轨迹计算。通过多项式算法生成适用于复杂道路的变道轨迹,并通过对单一参数的求取简化了计算数据。最后利用仿真计算实验进行验证,实验表明,该算法在复杂道路上具有一定的有效性和正确性,存在一定的优势。
关键词:智能车辆;变道;轨迹规划;多项式
中图分类号:TP273;U463.6 文献标识码:A 文章编号:2096-4706(2019)17-0020-03
Abstract:In this paper,trajectory planning algorithm is used to calculate the trajectory of different vehicles according to the environment and conditions of lane changing,with time as the main target parameter. The polynomial algorithm is used to generate the lane-changing trajectory suitable for complex roads,and the calculation data is simplified by calculating a single parameter. Finally,the simulation results show that the algorithm is effective and correct on complex roads,and has certain advantages.
Keywords:intelligent vehicle;lane change;trajectory planning;polynomial
0 引 言
本文采取的是几何计算方式,该计算方式有:运算量小、数据精确且直观等特点,到目前为止是各个研究者进行车辆变道计算时运用最广泛的算法,该算法生成的变道轨迹可分为圆弧变道轨迹和等数偏移变道轨迹。实际上,无论是圆弧变道还是等数偏移变道都存在曲率不连续、容易发生突变等问题,与车辆实际运动学不相符。需要通过运用B样条取现的方式,改善上述缺点,但其算法也存在缺陷,如在汽车变道的过程中,很难实现对横向最大加速度的实时控制,因此,采用梯形加速度变轨的计算方法,这样既能够有效控制曲率连续变化率,又能够很好地满足汽车轨迹运动学理论。梯形加速度变道轨迹方式的缺点在于不够灵活,且调节起来较为困难,因此只是用于复杂路面智能车辆行驶。
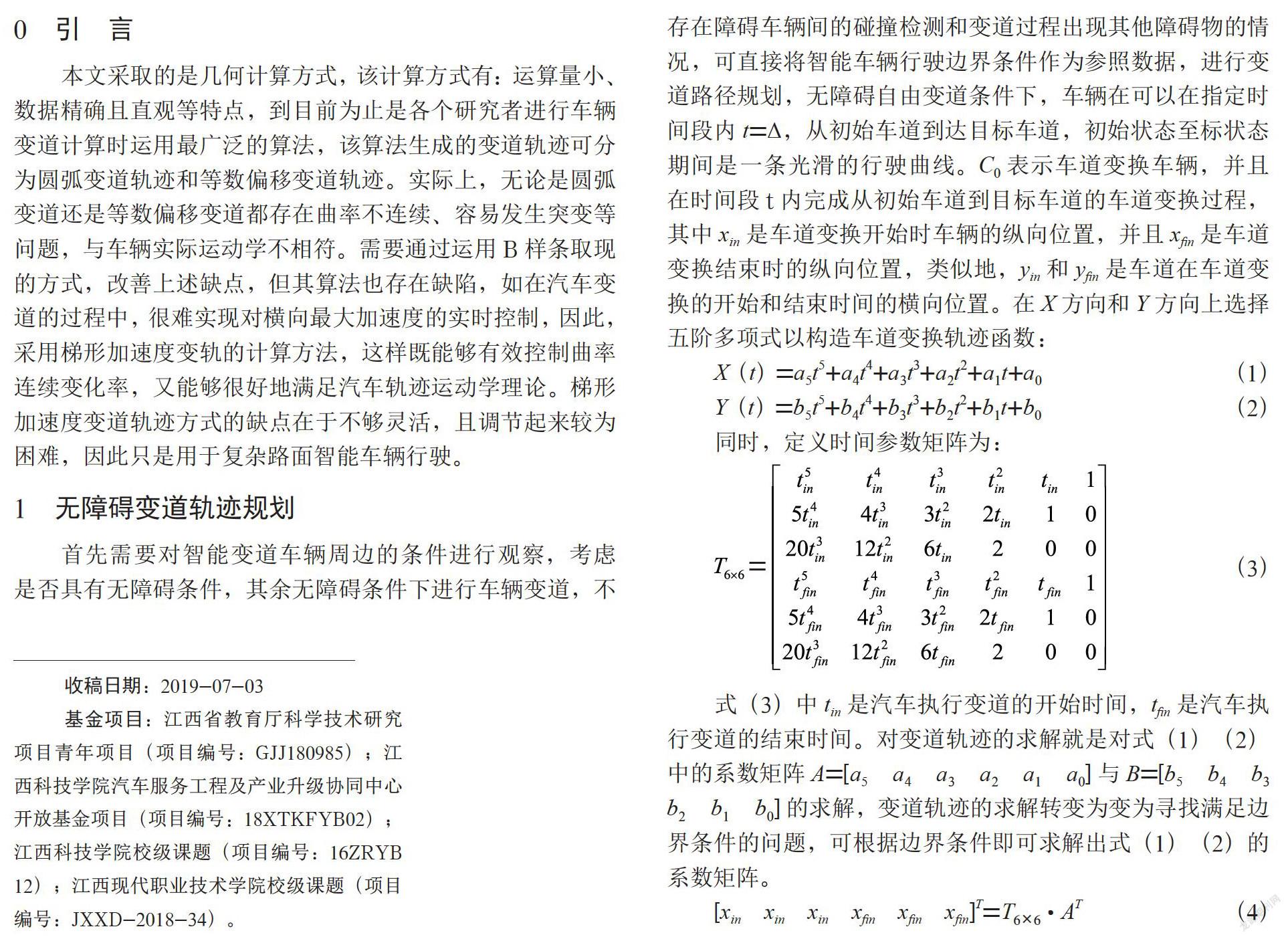
1 无障碍变道轨迹规划
3 實验仿真
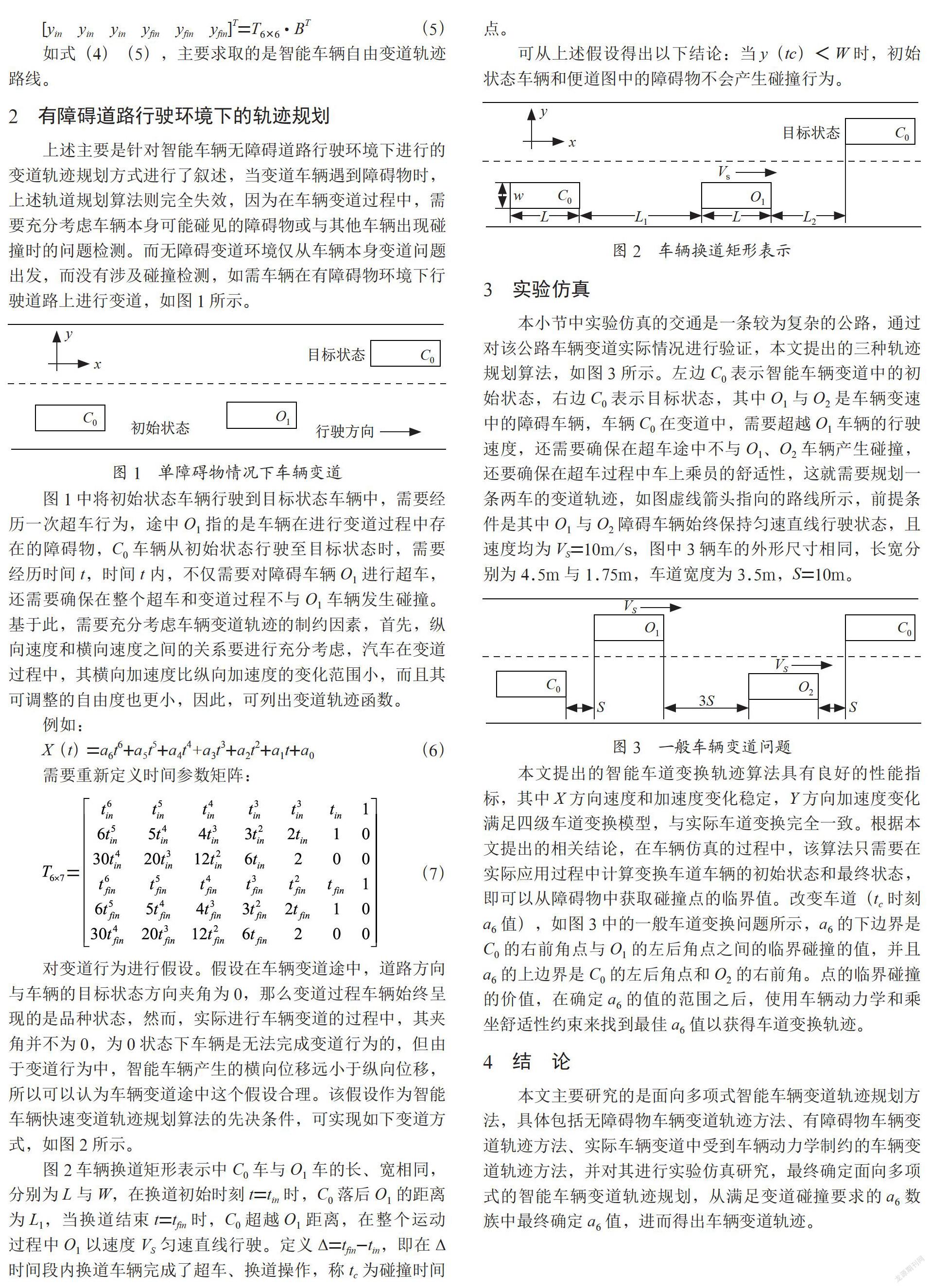
本小节中实验仿真的交通是一条较为复杂的公路,通过对该公路车辆变道实际情况进行验证,本文提出的三种轨迹规划算法,如图3所示。左边C0表示智能车辆变道中的初始状态,右边C0表示目标状态,其中O1与O2是车辆变速中的障碍车辆,车辆C0在变道中,需要超越O1车辆的行驶速度,还需要确保在超车途中不与O1、O2车辆产生碰撞,还要确保在超车过程中车上乘员的舒适性,这就需要规划一条两车的变道轨迹,如图虚线箭头指向的路线所示,前提条件是其中O1与O2障碍车辆始终保持匀速直线行驶状态,且速度均为VS=10m/s,图中3辆车的外形尺寸相同,长宽分别为4.5m与1.75m,车道宽度为3.5m,S=10m。
本文提出的智能车道变换轨迹算法具有良好的性能指标,其中X方向速度和加速度变化稳定,Y方向加速度变化满足四级车道变换模型,与实际车道变换完全一致。根据本文提出的相关结论,在车辆仿真的过程中,该算法只需要在实际应用过程中计算变换车道车辆的初始状态和最终状态,即可以从障碍物中获取碰撞点的临界值。改变车道(tc时刻a6值),如图3中的一般车道变换问题所示,a6的下边界是C0的右前角点与O1的左后角点之间的临界碰撞的值,并且a6的上边界是C0的左后角点和O2的右前角。点的临界碰撞的价值,在确定a6的值的范围之后,使用车辆动力学和乘坐舒适性约束来找到最佳a6值以获得车道变换轨迹。
4 结 论
本文主要研究的是面向多项式智能车辆变道轨迹规划方法,具体包括无障碍物车辆变道轨迹方法、有障碍物车辆变道轨迹方法、实际车辆变道中受到车辆动力学制约的车辆变道轨迹方法,并对其进行实验仿真研究,最终确定面向多项式的智能车辆变道轨迹规划,从满足变道碰撞要求的a6数族中最终确定a6值,进而得出车辆变道轨迹。
参考文献:
[1] 游峰.智能车辆自动换道与自动超车控制方法的研究 [D].长春:吉林大学,2005.
[2] 曹昊天,宋晓琳,黄江.基于弹性绳理论的自主车辆防碰撞的路径规划 [J].汽车工程,2014,36(10):1230-1236.
[3] 李玮,王晶,段建民.基于多项式的智能车辆换道轨迹规划 [J].计算机工程与应用,2012,48(3):242-245.
[4] 项忠珂.汽车碰撞安全新技术的发展趋势——评《汽车碰撞安全新技术》 [J].中国安全科学学报,2018,28(11):191.
[5] Feifei Xiang,Zhongke Xiang,Wenming Cheng. Structure Optimization of Air Filter Based on Parametric Sensitivity [J].Wuhan University Journal of Natural Sciences,2019,24(3):271-276.
[6] Nguyen T. T.,Spehr J.,Uhlemann M.,et al. Learning of lane information reliability for intelligent vehicles [C]//IEEE International Conference on Multisensor Fusion & Integration for Intelligent Systems. IEEE,2017.
作者简介:罗哲(1987.08-),男,汉族,江西赣州人,讲师,硕士,毕业于南昌大学,研究方向:自动控制、智能制造。