基于视觉定位的在线式机器人螺钉紧固模组应用
2019-09-10 06:01田升
现代信息科技 2019年16期
关键词:工业机器人



摘 要:传统3C电子行业产品的装配工艺一般都是离线批量式生产作业方式,但在目前产品快速迭代、型号种类繁多的大趋势下,这种作业方式可能无法满足生产需求。本文介绍了一种利用工业机器人为执行本体,搭载螺钉紧固组件和视觉定位系统的在线式工作模组为应用的新的自动化装配解决方案。
关键词:工业机器人;螺钉紧固;视觉定位;工作模组
中图分类号:TP242;TP391.41 文献标识码:A 文章编号:2096-4706(2019)16-0135-04
Abstract:The traditional 3C electronic products industry the assembly process is usually offline batch production operation way,but in the current rapid iteration model a wide variety of products under the big trend,this mode of operation may not be able to meet production requirements,the article introduces the use of industrial robots for execution of ontology,carrying screw fastening components and visual positioning system on-line work module for the application of a new automated assembly solutions.
Keywords:industrial robot;screw fastening;visual positioning;working module
0 引 言
最近十几年,伴随着全球经济一体化进程的加速,“中国制造”已经在世界范围内发挥着越来越重要的作用。但目前国内制造业普遍面临人力成本不断提高以及客户对产品质量、交期不断提高的要求带来的压力,许多企业开始通过导入自动化生产设备代替人工作业降低生产成本。在这种大背景下,机器视觉和工业机器人搭配的一种自动化解决方案在中国进入了一个快速发展期。很多的企业开始利用搭载机器视觉的工业机器人来代替手工生产作业。
机器视觉就是用机器替代人眼来完成观测和判断,常用于生产过程中的产品质量检测和产品定位。工业机器人作为执行本体,其作用就是替代人的手完成產品的组装。机器视觉定位技术和工业机器人的结合可以大大提高产品生产质量和效率,并且可以避免人眼视觉检测带来的偏差和人手工作业一致性差的问题。
本文介绍应用机器视觉定位技术和工业机器人相结合的生产方式在产品组装工艺中应用的一种自动化解决方案,该方案利用六轴工业机器人、视觉定位系统、螺钉紧固模组、自动送螺钉机,自动化生产线等设备,构建了一个在线式工作模组。
1 基于视觉定位的在线式机器人螺钉紧固模组
1.1 工作模组介绍
该工作模组应用于基站天线整机组装生产车间,主要由CMOS(complementary metal-oxide semiconductor)视觉定位系统、六轴工业机器人、螺钉紧固组件(含电批)、自动送螺钉机、多工序集合流水生产线组成。
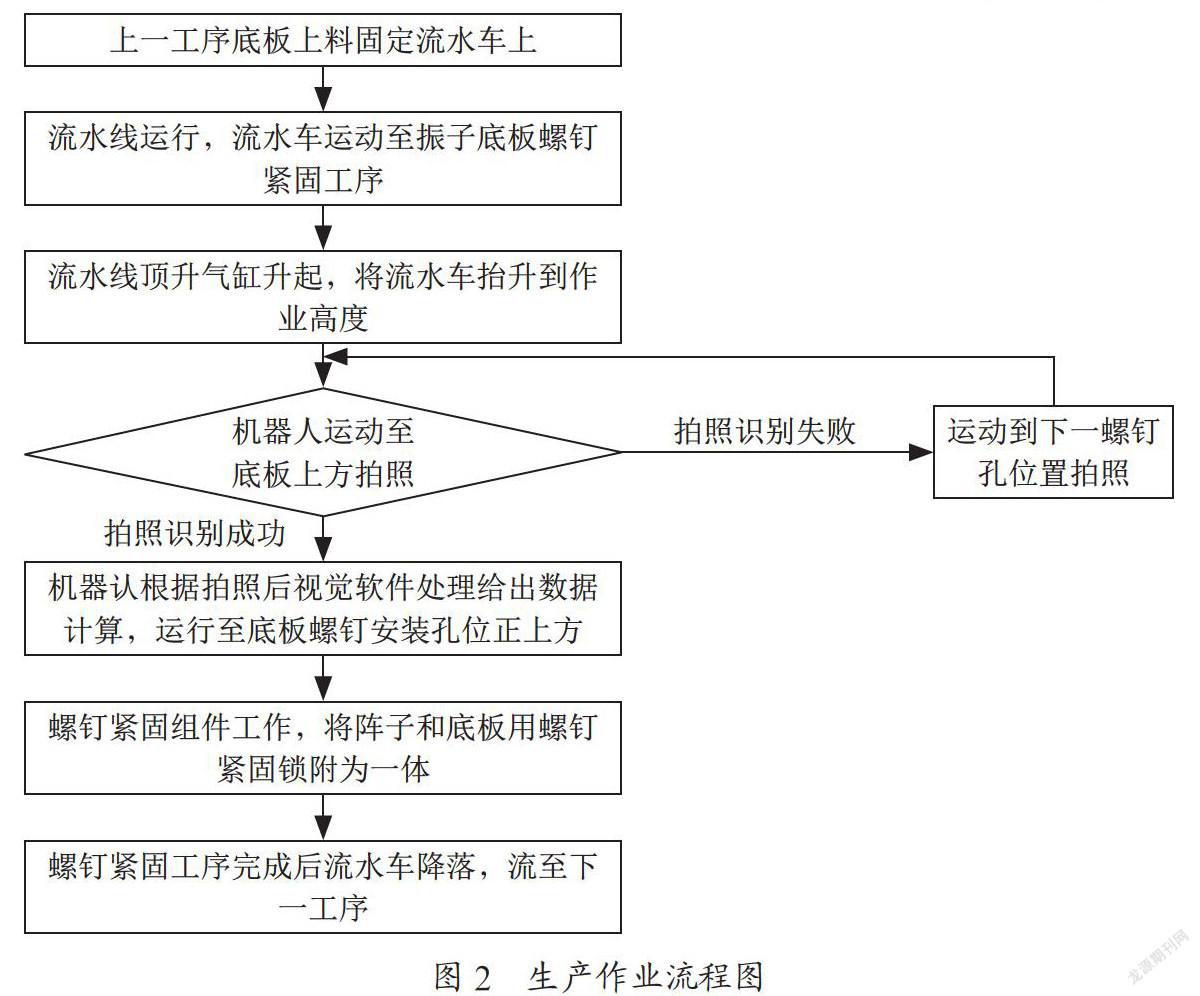
天线底板在自动流水线的上一工序完成上料后固定在流水车上,然后流到底板螺钉紧固工序岗位,自动流水线检测流水车运行到位后升降气缸动作,将流水车抬升至六轴机器人作业高度后发送到位信号给两台六轴机器人,两台六轴机器人运动至底板螺钉孔位正上方后通过EtherNet/IP通讯协议将启动拍照指令发给其头部搭载的工业相机,相机拍照后将采集的图片进行分析处理得出螺钉孔位中心相对于示教时的偏移值,然后图像处理软件将偏移值回传给六轴机器人,六轴机器人将偏移值(X轴、Y轴、Z轴的旋转角度)和示教位置数据相加后运行至目标位置,发出启动信号给电批完成螺钉紧固工作后,发送请求送钉信号给自动送螺钉机完成螺钉送料,两台六轴机器人依次将天线底板中26个螺钉紧固完成后发出加工完成信号给到控制自动流水线的PLC,自动流水线收到加工完成信号后将升降气缸复位,流水车下降到流水运行高度,待其他工位工序完成后整体往下流动,完成一个螺钉紧固工序的循环。整个工作模组放置在自动流水线旁边,通过和线体的信号对接可在线对天线进行组装,通过六轴机器人加视觉辅助定位的方式,天线底板孔位位置设计变更和每个流水车存在的机械偏差等问题都可以通过软件调试的方法解决,避免产品设计变更带来的传统天线生产使用治具跟随变更导致的治具加工周期时间浪费,从而实现天线整机自动化装配工艺在线式生产。
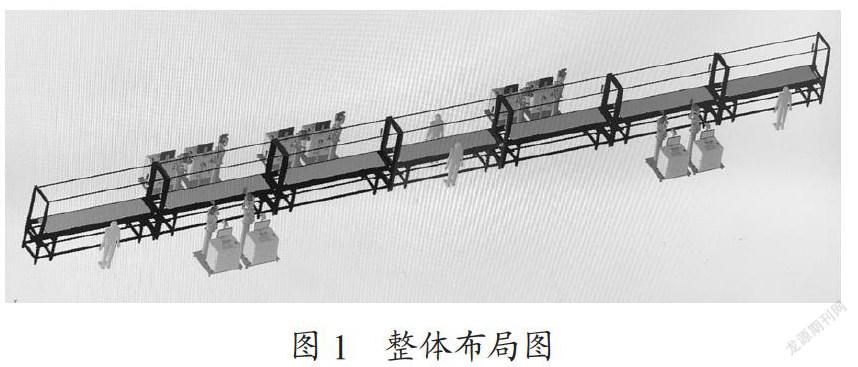
1.2 方案整体布局
方案整体布局如图1所示,由两台ABB六轴机器人作为执行本体,利用六轴机器人自由度高、重复定位精度高、可自由编程的特点,采用视觉定位技术应对天线设计的变更频繁和信号繁多,建立在线式的天线整机装配生产作业平台。
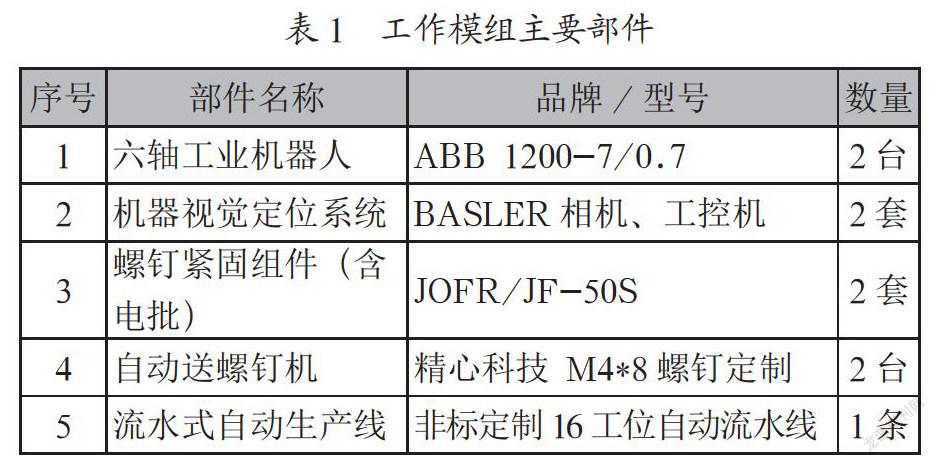
1.3 设备参数
工作模组的主要组件如表1所示。
1.4 生产作业流程
生产作业流程图如图2所示。
2 模组构建实施
2.1 六轴机器人
2.1.1 六轴机器人选型
整个工作模组选用了两台ABB 1200六轴机器人作为执行本体工具端,搭载视觉定位相机和螺钉紧固组件,实现在线式装配工艺,该六轴机器人负载为7kg,重复定位精度为±0.02mm,单台工作范围700mm,两台机器人协同工作便可覆盖约2400mm的工作范围,满足大部分主流天线尺寸范围。
2.1.2 两台机器人协同
由于需要两台机器人协同完成对整副天线的螺钉装配工作,两台机器人存在部分工作区域重叠干涉,如图3所示。根据机器人工具端宽度情况,将干涉区分为八大块,使用互锁方式让两台机器人在保证安全的前提下协同工作。
如图3所示,当1号机器人需要进入1-7/1-8点位进行工作时,需要判断2号机器人在哪个工作区域,如果2号机器人刚好在与其存在干涉的2-1点位时,会根据2号机器人发出的互锁信号选择等待,当2号机器人离开2-1工作区域时将1号机器人解锁,允许其进入1-7/1-8点位进行工作。以此类推,两台机器人共设了4组互锁信号,保障两台机器人在存在干涉的8个区域内安全地进行协同工作。
2.1.3 通讯接口
ABB 1200六轴机器人可实现与外部设备多种通讯协议的通信,这次方案主要采用DeviceNet通讯协议实现两台机器人之间通信,机器人作为客户端采用EtherNet/IP通讯协议与视觉系统进行数据的传输交换。
2.2 视觉系统
2.2.1 硬件构成
视觉系统的硬件由Basler相机、Computer镜头、条形光源、工控机及图像处理软件构成,详情如表2所示。
2.2.2 相机选型
相机的作用是将镜头聚焦于像平面的光线生成图像。相机中最重要的组成部件是数字传感器。数字传感器主要有两种技术类型:CCD(charge-coupled device)和CMOS,两者主要是从芯片中读出数据的方式即读出机构不同。基于成本考虑,采用了成本更低的CMOS传感技术的Basler相机、型号为acA2500-14gm。
2.2.3 镜头选型
镜头是一种光学设备,用于聚集光线在数字传感器上成像。镜头的作用是产生锐利的图像,以得到被测物的细节。由于镜头内部凸透镜成像原理,镜头的焦距数据是最重要的参数,根据方案需求,被测物体表面到镜头之间的距离大约为130mm,最后选择的是35mm焦距的Computer品牌镜头。
2.2.4 光源选型
机器视觉系统常见光源有白炽灯、氙灯、荧光灯、发光二极管(LED)。由于白炽灯发热严重、寿命短,氙灯供电复杂且昂贵,荧光灯寿命短老化快、光谱分布不均匀,此三种光源类型都不能满足工业要求,最后选择寿命长、亮度易控制、光源功耗小、发热少的LED光源,由于LED有较多优点,因此也是目前机器视觉中应用最多的一种光源。
LED是一种通电致发光的半导体,能产生类似单色光的非常窄的光谱的光。其发光亮度与通过二极管的电流有关。发出的光的颜色取决于所用半导体材料的成分,可以制成红外光、可见光及近紫外光。
2.2.5 图像处理软件
图像处理软件是利用Basler的sdk与相机通信,视觉算法基于OpenCV库、Halcon库、自主开发的纠偏算法与模型以及TCP Server与两台机器人通信和传输数据。图像处理软件界面如图4所示。
2.3 螺钉紧固组件及配套送料设备
由于天线底板振子装配都是使用M4*8梅花耐落螺钉,扭矩要求15±2Kgf/cm,同时有电批带力矩到位反馈、反转控制等要求。经过选型后采用了JOFR电批(型号:JF-50S;转速:400r/min;扭矩范围:15~50Kgf/cm)辅以相应的机械结构完成螺钉紧固装配动作。
螺钉供料设备具备快速自动上料功能,同时能与机器人进行信号交互。
2.4 自动流水线
自动流水线是以20个流水车作为天线产品的载体,在线体内依次流动,匹配各工序类分的工作模块配线生产方式,以六轴机器人作为执行主体,配合必要的機械辅助、视觉精准定位的方式,进行产品的组装生产。
3 结 论
综上所述,基于视觉定位的在线式机器人螺钉紧固模组应用方案介绍,详细解析了方案各组成部分,详细分析了几种重要设备的选型参数要求,为视觉定位系统与工业机器人相结合应用推广提出一种新的解决方案。
参考文献:
[1] [德]Carsten Steger,Markus Ulrch,Christian Wiedemann.机器视觉算法与应用 [M].杨少荣,吴迪靖,段德山译.北京:清华大学出版社,2008.
[2] 叶晖,管小清.工业机器人实操与应用技巧 [M].北京:机械工业出版社,2010.
作者简介:田升(1991.08-),男,汉族,江西赣州人,自动化工程师,研究方向:工业机器人应用。
猜你喜欢
中国科技纵横(2016年20期)2016-12-28
科技创新与应用(2016年34期)2016-12-23
青春岁月(2016年22期)2016-12-23
汽车科技(2016年6期)2016-12-19
科技创新导报(2016年21期)2016-12-17
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
科技视界(2016年18期)2016-11-03
企业导报(2016年13期)2016-07-19
科技视界(2016年15期)2016-06-30
成才之路(2016年4期)2016-03-23