
地面三维激光扫描技术在险工护岸监测中的应用分析
2019-09-10 07:22郭志金刘林佳吴昊
水利水电快报 2019年7期
关键词:三维激光扫描
郭志金 刘林佳 吴昊
摘要:三维激光扫描技术又称实景复制技术,是无合作目标的自动化快速测量系统。在险工护岸监测中,高密度测量技术和非接触测量手段大幅提高了特定区域测量的成果精度和工作效率[1]。通过实例对三维激光扫描系统获取的点云密度和精度进行分析,阐述其在险工护岸监测工作中的可行性;通过配准处理后的点云数据完成高精度数字地面模型的建立,可为科学决策提供有力的数据支撑。
关键词:三维激光扫描:险工护岸;护岸监测;数字地面模型
中图法分类号:TV861
文献标志码:A
DOI: 10.15974/j.cnki.slsdkb.2019.07.004
1 三维激光扫描仪测量原理
三维激光扫描仪主要由测距系统、测角系统以及其他辅助功能系统构成,通过激光扫测快速、准确获取物体三维坐标、反射强度(Intensity)及纹理信息等。
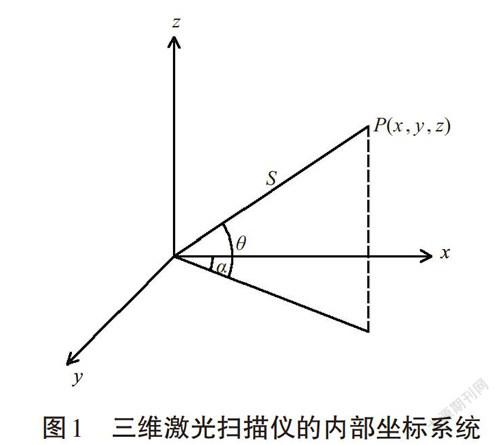
测量原理是扫描得到测站点到待测物体表面任一目标点的距离S,并获得测量瞬间激光脉冲的横向扫描角度观测值α和纵向扫描角度观测值θ,进而得到激光角点在物体表面的基于三维激光扫描仪的内部坐标系统三维坐标值。具体见图1,获取的坐标计算公式见式(1)。
x=Scos θcosa
y=Scosθsina
(1)
z=Ssinθ
以上解算的是内部坐标系统坐标。在实际生产应用中,还需将其转换到测站坐标系。三维激光扫描仪提供了设置测站工作流和自由设站工作流两种解决方案。设站模式下扫描坐标即为测站坐标系下的坐标;自由设站模式需通过配准实现扫描坐标向测站坐标的转换[1-2],一般采用布尔莎七参数法。
2 测量误差分析及质量控制
三维激光扫描仪获取的点云误差包括数据采集阶段的误差及数据处理阶段的误差。数据采集階段的误差组成包括仪器误差、目标反射面有关的误差以及外界环境误差;数据处理阶段误差主要是配准误差[3]。
2.1 仪器误差
圆形发射的激光束到达物体表面形成的光斑大小随扫描距离的增加而线性增大。定位的不确定性是指激光回射信号不一定位于光斑中心,其极限误差即为光斑半径r。
2.2 目标表面因素
激光测距依赖于来自被测目标反射的激光,反射信号的强度一般均受目标反射特性的影响,且直接影响测量精度。物体反射特性的差异会导致一定的系统性偏差。物体反射特性受材质、表面倾斜度和粗糙度、色彩等影响。如果表面过于光滑和明亮会产生镜面反射,反射信号过强而造成较大的测量误差。
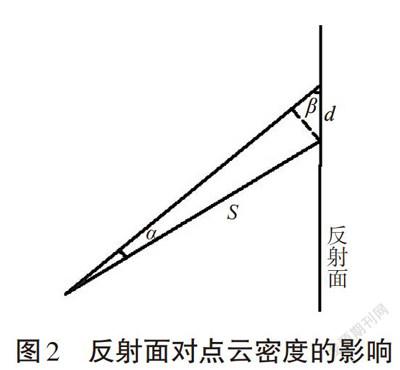
(1)反射面倾斜对点云密度的影响。点云密度可视需求选择扫描仪不同的工作模式,差别在于激光束间夹角的大小。此外,点云获取的密度还与激光束入射角和距离有关系,反射面对点云密度的影响见图2。
理论密度计算公式如下
d=S sina/sinβ
(2)式中,α为激光束间的夹角,β为激光束的入射角,S为目标距离。
(2)反射面倾斜对测量精度的影响。反射面倾斜对测量精度的影响主要表现在激光束打到倾斜面上光斑会扩散成椭圆,此时因光斑大小导致的极限误差即为椭圆的长半轴半径,其大小为r/cosβ。
2.3 点云配准因素分析
设置测站工作流直接获取测站坐标系统下的点云成果,无需配准。自由设站工作流的配准方法有自动配准和手动配准,下面以险工护岸监测汛后测次yx3→yx2→yxl测段3站的数据进行精度统计比较。
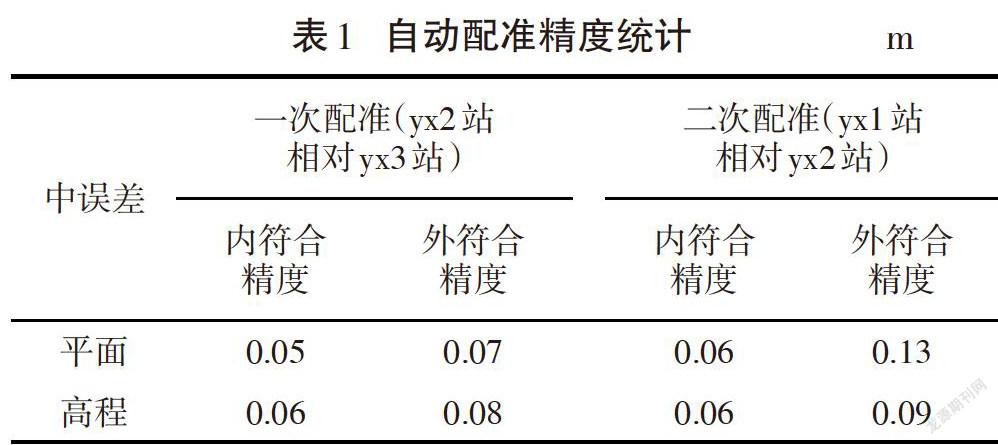
自动配准是以公共面进行匹配,系统自动提取特征点对计算;自动配准需选择参考站和自由站,只能以某站为参考逐站配准,导致累积误差越来越大。当自动配准不通过时,必须采用手动配准再次进行配准。自动配准精度统计见表1。
由表1可见,逐站配准后,邻站较差无明显差异。但逐站配准因为缺少约束条件,精度逐步降低,误差累积效应明显。
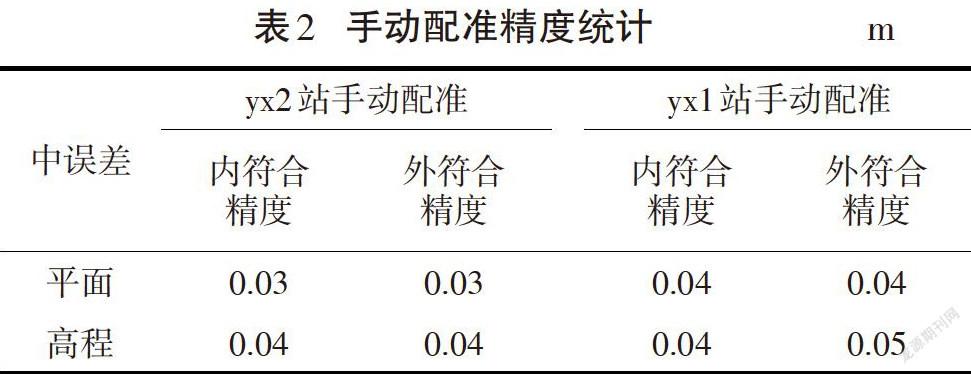
手动配准是手工提取特征点对进行计算,当特征点为已知点时,即实现各自由站坐标系统的独立转换,避免了误差累积。手动配准精度统计见表2。
由表2可见,各测站手动配准后精度分布更均匀,较自动配准整体精度更高。这是因为自动配准是基于面提取特征点对,而险工护岸监测区域有别于工业厂房等测区,鲜有大面积规则立面,且试验未对房屋等进行多测站、多角度扫描。
3 数据统计和分析
3.1 点云密度检查
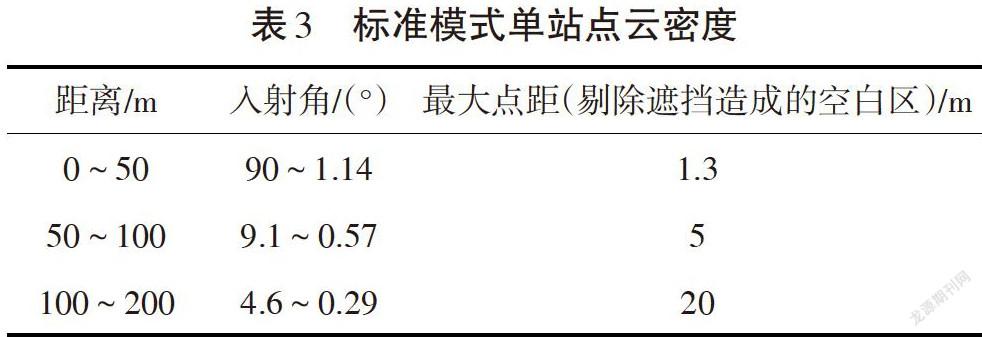
受险工护岸测区自然条件限制,激光入射角普遍较小,点云密度不均衡。扫描仪与原地面高差在1~8m;测区50 m范围外,随着距离的增加,地形起伏引起的入射角变化范围逐步减小。同时随着距离的增加,植被对扫测空白区的影响逐步增大。采用标准模式(对应波束间夹角103”)扫测时,对应点云密度见表3。
由表3可见,作业中需严格控制扫测距离,外业中应仔细检查各测站边缘区域覆盖情况。
3.2 特征点精度检查
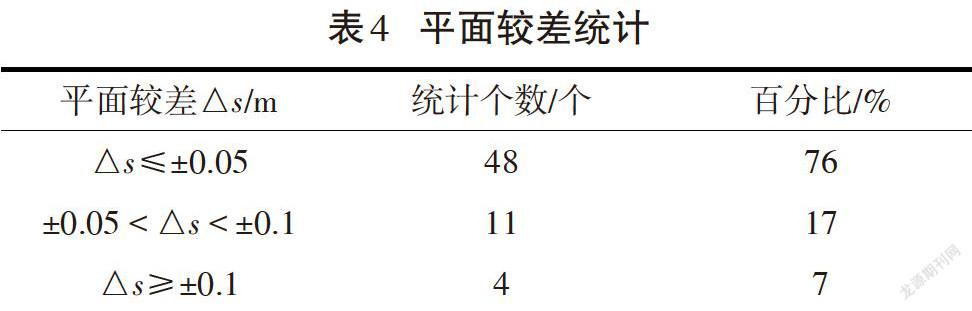
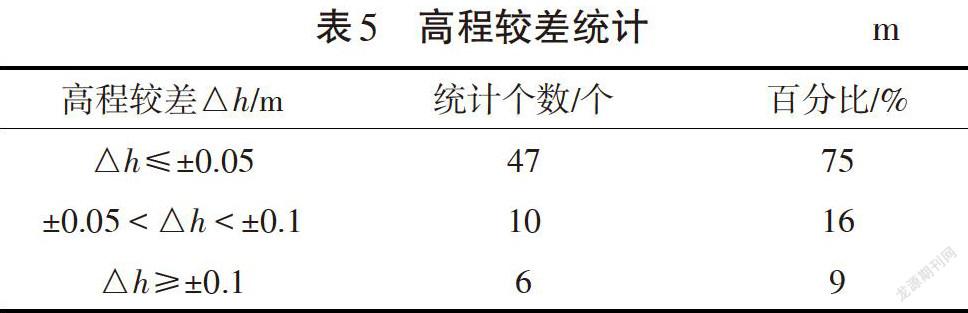
统计险工护岸试验区域内所有特征点和靶标点的三维激光扫描仪采集坐标与传统测量方式采集坐标的差值[4],计算平面位置中误差和高程中误差。共选取了63个点进行了平面和高程较差统计(见表4-5)。
计算得到平面位置中误差为0.042 m,高程中误差为0.045 m。依据SL257-2017《水道观测规范》[5]对专用地形图的精度要求,平面位置允许中误差为图上0.5 mm,高程允许中误差为0.15 m,险工护岸监测测图比例尺一般不大于1:500,则平面位置允许中误差不小于0.25 m。由此可见,扫测精度满足测图需求。
3.3 点云整体精度检查
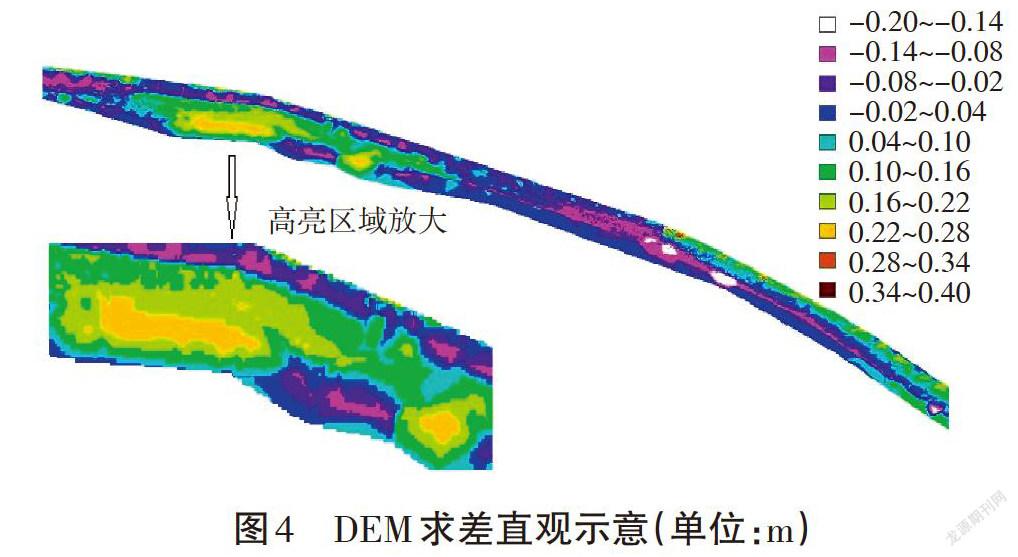
根据常规测量手段形成的地形图构建DEM,与激光扫描仪获取的点云构建的DEM求差,即可得点云整体精度。
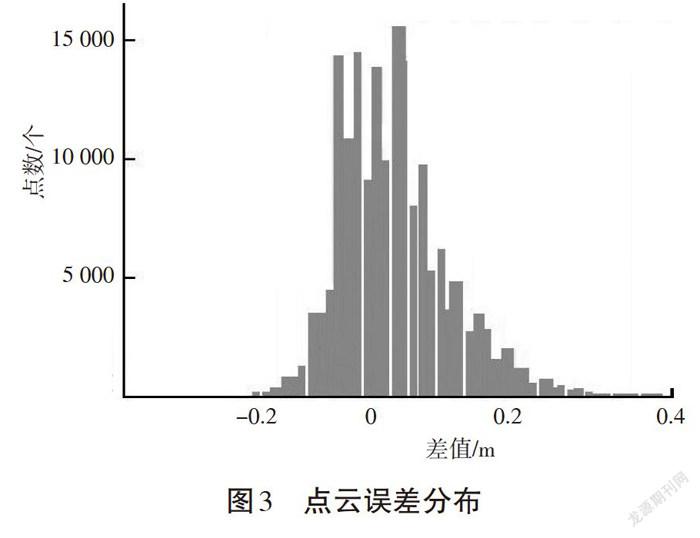
图3中灰色区域即为密集高植被区域,扫测数据集中在高植被表面,DEM求差值(见图4)即为植被高,故该区域扫测数据不可用,本试验采用RTK补测原地面。
4 结论与建议
三维激光扫描仪在险工护岸监测中应用研究的试验结果满足相关规范的精度要求,但为了保证该测量技术施测结果的高精度,进行影像扫测系统施测陆上地形时应选择植被覆盖稀少区域[6]。
通过以上论述和实验数据分析,可得出如下结论。
(1)在山坡陡崖、崩岸险情等监测方面,良好的观测条件加上无接触式测量使得影像扫测系统具有较大优势。
(2)影像扫测系统的观测精度较高,满足大比例尺测图的要求,但植被区域因无法获取原地面,精度较低。
(3)受地形条件限制,不可避免地出现扫描死角,同时点云密度分布不均。
对后续三维激光扫描仪的应用提出如下建议。
(1)测量区域应选择植被覆盖稀疏的区域进行。
(2)在点云编辑方面,重点考虑点云分类提取能力和手工编辑能力。宜选取或开发一个点云子区编辑模块,提高编辑精准度,同时在此模块中实现对点云高程编辑功能,这样就能较为精准地解决密集低矮植被区域点云向原地面的调整。
(3)应充分考虑后处理软件在制图方面的便利性和高效性。
参考文献:
[1]梅文胜,周艳芳,周俊.基于地面三维激光扫描的精细地形测绘[J].测绘通报,2010(1):53-56.
[2]周建红,马耀昌,刘世振,等.水陆地形三维一体化测量系统关键技术研究[J].人民长江,2017,48(24):61-62.
[3]汪仁银,李开伟,陈锐,等.三维激光扫描技术在地形测绘中的应用[J].测绘通报,2018(12):159-162.
[4]史波,郑敏,基于三维控制场的三维激光扫描仪点位精度评定[J].人民长江,2017,46(3):27-30.
[5]SL 257-2017永道观测规范[S].
[6]李志鹏,张辛,喻守刚,等,基于三维激光扫描的大比例尺地形测绘方法研究[J".人民长江,2014,45(7):70-73.
猜你喜欢
中小企业管理与科技·中旬刊(2017年12期)2018-01-16
南水北调与水利科技(2017年6期)2018-01-09
科技视界(2017年16期)2017-11-11
科技创新与应用(2017年32期)2017-11-06
海峡科技与产业(2017年8期)2017-09-06
农家科技(2017年7期)2017-08-15
智能计算机与应用(2017年3期)2017-07-15
农家科技(2017年5期)2017-07-14
中国科技纵横(2017年3期)2017-03-29
科技视界(2016年4期)2016-02-22
