面向中学生创客教育的简易四轴飞行器设计
2019-09-10 07:22于明军贾晓艳
赤峰学院学报·自然科学版 2019年7期
于明军 贾晓艳






摘要:随着时代发展,四轴飞行器技术快速进步,市面上的大部分四轴飞行器,设计难度较大,不适合中学生进行学习研究,为解决这一问题,分析现已有四轴飞行器,设计一款符合中学生课堂教育的ARM四轴飞行器.四轴飞行器使用简单,PID算法对飞行器进行平衡控制,实现了基本飞行功能,降低了学习难度,可以满足中学生创客教育要求.
关键词:四轴飞行器;中学创客教育;单片机控制
中图分类号:TP368.2 文献标识码:A 文章编号:1673-260X(2019)07-0091-04
1 引言
四轴飞行器即空中机器人,随着机械原理、电子传感器、计算机软硬件以及人工智能机器人等众多技术的迅速发展,越来越多的智能产品出现,四轴飞行器的研究也在不断地完善,在各种领域得到了广泛的应用,新的领域也在不断拓展之中,20世纪以来,机器人教育逐渐受到全世界各个国家的重视,目前为止我国还未全面开展机器人中学教育的普及,机器人教育与传统的学科教学的教育方式不同.机器人知识引入中学课堂让学生了解最新的智能技术,培养学生的创新思维能力、空间想象力、实践动手能力、解决困难的能力、团队协作能力.得到了一致的认可,对孩子的成长、今后专业的选择以及整个人生十分重要.
2 中国创客教育及四轴飞行器应用
创客一词来源于英文单词“Maker”或“Hacker”,是指出于兴趣和爱好,努力把一些天马行空的想法转变为现实的人.STEAM教育中的着重点是培养创新思维和能力,然而,传统课堂无法将学习者的创新能力表现出来.因此创客精神和教育的碰撞,产生了创客教育的概念.
“创客教育”是创客运动与教育理念的相互融合,以学生为中心,综合已学的知识,通过团队合作设计制作一个作品的方式培养学生的动手操作能力、逻辑思维创新能力的一种素质教育.我国创客教育的发展起步较晚,2015年李克强总理在《政府工作报告》明确提出“大众创业,万众创新”是推动我国经济稳定增长的动力源泉,为了培养创客人才,国家出台了《新一代人工智能发展规划》《教育信息化2.0》等一系方案助推创客教育,创客教育在我国的河南、上海、北京、浙江、西安、深圳以及广州等城市以构建主题创客实验室为基础加大科技创新教育的投入,近几年来“创客教育”已经从新名词变成了许多中小学校课表中的熟悉面孔.“创客”的理念融入“教育”,为我国传统教育注入了新的活力.目前我国创客教育以课堂基本知识的传授为主,缺少系统的课程设计和实施方案,如何更好地实施创客教育,完善本土化的创客教育理论体系成为未来一段时间内必须解决的问题.
为了激发青少年对电子信息技术的探索与学习,开展了各种各样的科技竞赛,四轴飞行器涉及物理、机械、计算机等多学科的知识,各类学科与科学技术的相互碰撞,弥补了传统课堂教学各学科界限泾渭分明的缺点.四轴飞行器可以给予青少年科技竞赛无限的发展空间,从机器人足球、机器人灭火、综合竞赛到无人机飞行的实现,都可以利用四轴飞行器来实现各种科技活动和竞赛.在制作简易四轴飞行器的过程中,可以学习有关的单片机原理、电子传感器技术、数字电子技术基础和模拟电子技术基础、计算机编程等多门学科的基本知识,体验飞行带来的乐趣的同时,还能参加科技竞赛,培养学生的创新思维能力和实际动手操作能力.
2.1 创客课程设计思想
一是基于四轴飞行器课堂理论教学,学习基本的知识与概念,二是基于四轴飞行器合作制作开展学习,在“做中学”;三是基于四轴飞行器比赛促进学习.谈到“四轴飞行器教学”,大多数人认为其“核心在于编程”,对中学生来说学习难度太大,不适合中学课堂教育的要求.本项目的课堂设计以学生的兴趣爱好为主体,多学科之间交叉渗透,激发学生的好奇心和动手动脑兴趣,培养学生综合能力.
2.2 创客课堂教学目标
机器人课程教学主要以四轴飞行器基础知识与技能的学习、学习的过程与方法、情感态度与价值观的培养全面展开设计课程.首先是无人机的发展历程、空气动力学原理与实际应用,了解机器人对我们生活的改变;二是了解四轴飞行器的基本构成原理、飞行的基本原理;三学生能够自己进行组装简单机器人;四是掌握基本的软件操作,基于C语言程序实现、PID算法的学习.五是提高学生动手操作能力、创新能力.最终目的为了促进学生的综合素质提高,使学生成为全面发展型人才.
3 四轴飞行器的结构与运动原理
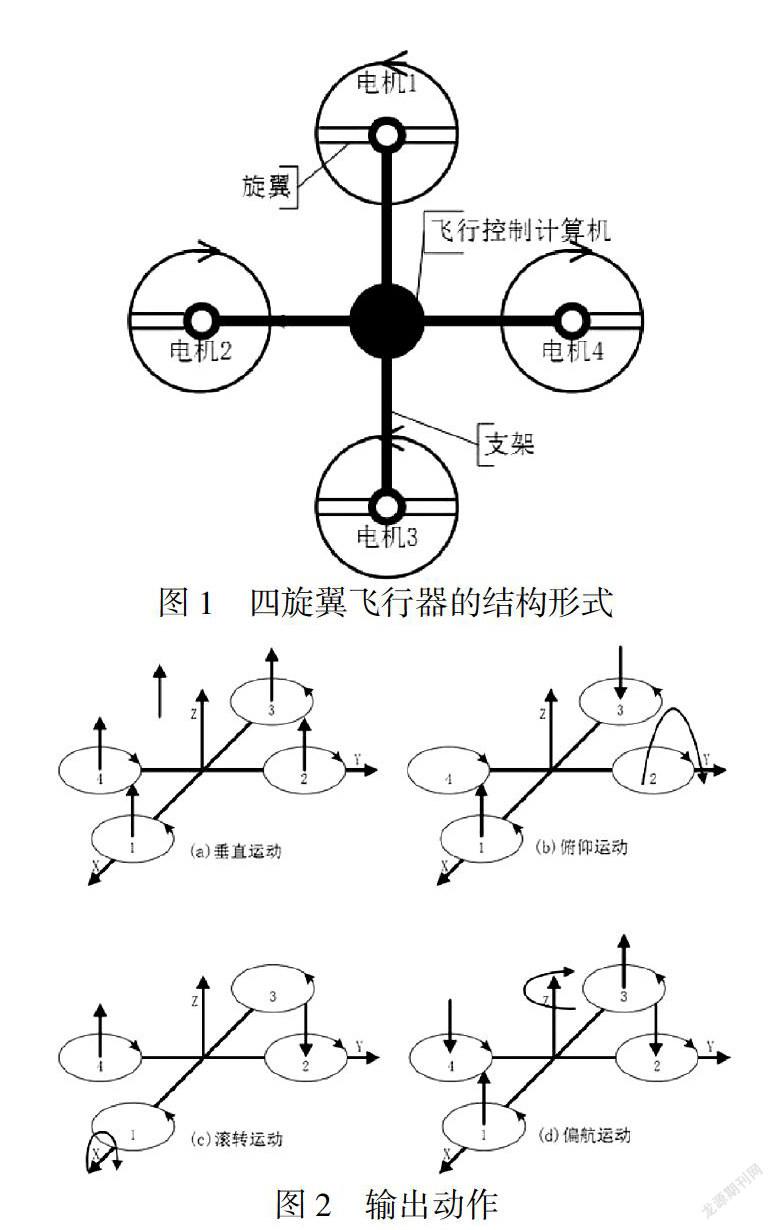
3.1 四轴飞行器的对称组成结构
四轴飞行器有两种飞行姿态,一种是根据四旋翼十字对称的结构,将处于同一水平线的一对机架梁作为X轴,另一对梁作为Y轴的“+”型飞行姿态;另一种是将相应两个梁的对称轴线作为X轴,另一条对称轴线作为Y轴的“X”型飞行姿态.
3.2 四轴飞行器的运动原理
四轴飞行器有四个输入状态,六种输出状态.四轴飞行器由四个电机控制,通过四个电机的不同转速产生的升力,可以做出垂直、俯仰、翻滚、偏航、前后、侧向六种输出动作.
3.2.1 垂直运动
垂直运动主要是使四轴空中机器人获得升降的功能,由图1可以看出,1、3与2、4两对电机向着相反的方向转动,可以保持对其机身的反扭矩,当四个电机获得的功率相同时,电机产生的升力与增加的速度相对应将驱动整个四轴空中机器人垂直上升.反之,当四个电机获得的功率同时减少,四轴空中机器人的电机速度减少,致使四轴空中机器人下降,直至平稳落地,达到了垂直运动.当电机产生的升力与飞行器向下的重力相等时,飞行器就可以完成定高了,故保证四个电机的能同时增减转速是四轴飞行器能够垂直运动的前提.
3.2.2 俯仰运动
电机1提供上升的力,电机3提供下降的力,电机2与4不变.为了保证电机的转速改变之后飞行器整体扭矩不变,电机1与电机3的转速所产生的升力应该相等.电机1产生的力向上,电机3产生的力向下,機身就可以绕着y轴转.同理,若电机1产生的力向下,电机3产生的力向上,所产生可使之绕着y轴转,使飞行器完成俯仰功能.
3.2.3 滚转运动
与俯仰运动相同,电机1所产生的力与电机3所产生的力保持不变,电机2与电机4的力相同且方向相反,即可使飞行器产生绕x轴旋转.
3.2.4 偏航运动
偏航操作,又称旋转控制,四轴飞行器偏航运动通过电机产生的扭矩进行旋转,当飞行器在飞行在空中时,当相对一组电机正转,另外相对一组电机反转,就会产生与转动方向相反的反扭矩,使飞行器完成旋转功能.
4 设计思路及框图
本项目采用的核心处理器为STM32F4,具有更快的ARMCortex-M4内核计算,其采用了90纳米的NVM工艺和ART技术,高性能传输数据,四轴飞行器的配件有机架、螺旋桨、电子调速器、电机、电池、飞控、遥控器以及接收机构成,原理为机架将各个零件组装在一起,电池负责供电,机身上的接收机收到来自遥控器的控制信号后传给飞控,飞控将信号转换为调节电调的信号,从而调整电机的转速进行各种飞行动作.四轴飞行器的设计框图如下:
5 飞行器硬件设计
5.1 电机与螺旋桨
四轴飞行器所使用的电机一般分为有刷电机和无刷电机两种,有刷电机多用在空心杯电机和碳刷型电机,目前四轴飞行器上的电机大多用的是无刷电机.无刷电机是使用三相交流电所产生一个旋转磁场,驱动转子转动,速度是由PWM信号控制.无刷电机具有小体积、高效率和稳态转速误差小等特点,要配合电子调速器(电调)使用.衡量无刷电机电气特性的重要指标KV值,物理学意义是指电机每增加1V电压时,电机空转的转速每分钟增加的次数.当KV值增大时,所产生的扭力会降低,当KV值减小时,所产生扭力会增加,所以KV值决定着螺旋桨的选择,通常KV值越高的选择小的高速桨,KV值低的选择大的低速桨,本项目使用的电机为MT2204无刷电机,KV值为2300KV,与其搭配的桨叶为5045R三叶桨一对,5045L三叶桨一对;如图4,图5.:
5.2 电子调速器
电子调速器简称电调,电调可分为两种,一种是有刷电调,控制着有刷电机工作;另一种时无刷电调,控制无刷电机工作,电调就是将飞控输出过来的控制信号转化为电流信号,从而驱动电机实现需要的转速输出,实现各种飞行姿态,是飞控与电机之间的桥梁.本項目采用无刷电调和无刷电机搭配,如图6所示:电子调速器与电池连接,信号线输入与接收机连接,三根信号输出与电机相连.
5.3 遥控器与电池
遥控器主要用来控制飞行器的飞行与调试,本项目采用富斯IA6遥控器,有6各通道,通道是遥控器的重要参数之一,通道指遥控器可以遥控的路数,通过控制油门来控制供电流的大小,调整机器人的飞行高度和力量.电池为电机动力的能源之源,本项目所使用电池为格式电池,容量为1300 mA,最大充电电流为6.5A,可持续放电32.5A.遥控器与电池实物图如图7.
5.4 飞行控制系统
飞行控制系统是飞行器组成的重要一环,飞行器在空中的时候,通过飞控的控制算法,能够对飞行器的飞行姿态以及运动参数进行实时控制,上面集成了加速度计、陀螺仪、气压计、罗盘以及距离传感器.能够控制各个电机的转速进而操控飞行器的飞行姿态,通过GPS与气压计能够实现飞行器定高、自动返航等功能.本项目采用STM32F4飞控如图8.
6 飞行器软件设计
6.1 PID算法
PID算法即比例(P)、积分(I)、微分(D)三部分组成,将输入通过三部分运算得出结果,不断重复这一过程,直至得到最优结果.
6.2 控制部分设计
控制系统是基于C语言编写,飞行器将陀螺仪输出信号等参数,输入到PID算法中进行计算,得到控制飞行器的PWM,从而稳定飞行器的飞行.另一方面,当飞行器接收到来自控制器方面控制信号之后,通过读取传感器的加速度和加速度,计算出目标角度所需的PWM信号.下图是软件流程图:
7 创客教育教学设计
7.1 创客教育教学课程内容及结构
创客教育课程根据学习内容及难易度分为基础、拓展、发展、能力培养、综合素质训练五个课程模块.基础模块偏重于介绍机器人概念、发展历程、基本原理组成等;拓展模块是在基础课程上进行延伸、拓展和补充,让学生学习四轴飞行器的机械部分、传感部分、控制与驱动部分;发展模块是四轴飞行器基于C语言编写以及PID算法的学习,让学生掌握基本的C语言编写,认识简单的程序结构,能够进行简单的程序调试;能力培养模块通过真实场景的四轴飞行器模拟飞行练习,设计与组装简单的四轴飞行器,激发学生对科学技术的好奇心、带动学生的思维、培养学生的操作能力、创新能力;综合素质训练模块从实际出发,逐步引导学生合作设计自己的四轴飞行器,鼓励学生积极参加四轴飞行器竞技类比赛,培养学生合作能力以及竞赛精神.结构图如11.
经过项目研究,多次试飞与讨论,我们决定将无人机课程的教学模式分为三个模块:理论及组装课程、模拟飞行课程、飞行课程.在模拟过程中提高同学的手眼协调能力,以及三维空间辨识度,为飞行课程做准备.教-学-做-赛-四位一体的教学模式.具体内容及课时分配如表1所示.
8 结论
“空中机器人教学”项目开展过程中,学生将整个飞行器用散件,通过动手组装、拆卸、焊接、调试,全面了解了飞行器的组装过程及飞行原理.组装过程简单,适合中学生的课堂教学水准,提高学生对科技的兴趣.促进了学生全面发展.此次项目教学锻炼了学生的动手能力、培养他们对科技的兴趣、满足了中学生对飞行器的好奇心.
参考文献:
〔1〕王佑镁,郭静,宛平.设计思维:促进STEM教育与创客教育的深度融合[J].电化教育研究,2019, 40(03):34-41.
〔2〕王振堂.中学创客教育背景下基于项目式学习的研究[J].中国现代教育装备,2018(18):8-10.
〔3〕孟祥霓,杨雪岩,翟殿棠.基于创新模式的电子设计综合实训教学体系及其实践研究[J].信息系统工程,2010(08):36-37.
〔4〕王丽华.面向创客教育的初中机器人教学研究[D].广西师范大学,2017.
〔5〕盛希宁,蔡舒旻.四轴飞行器的系统设计[J].林业机械与木工设备,2018,46(04):40-43.
〔6〕贾冕茜,王茂琦,蒋玲.一种基于STM32的四旋翼飞行器控制系统设计[J].计算机产品与流通,2017(12):263-264.
〔7〕乔宏飞,魏远江,李刚.基于STM32单片机的便携式自拍四旋翼飞行器[J].电子制作,2018(07):23-25.
〔8〕程煦,郭珊珊,陈华宾.基于STM32单片机的四旋翼飞行器设计[J].电子世界,2017(03):121-124.