
高精度视觉识别与运动控制系统在科技馆展品设计研发中的实践运用
2019-09-10 07:22音袁王家伟刘立成庄万水
科学教育与博物馆 2019年5期
关键词:人工智能
音袁 王家伟 刘立成 庄万水


摘 要 本文基于高精度视觉识别与运动控制系统的理论基础,针对机器人智能展品的发展现状及原理方法等进行简要论述。结合一种典型的实时智能机器人科普展品“冰球机器人”的研发成果,阐述工业数字高速摄像机视觉识别系统和伺服运动控制系统的运行原理及重要作用,拟开发一个完整的冰球机器人运动伺服平台并实现实时智能控制,重点探讨该机器人视觉系统的开发设计及技术重难点的解决方案,以期能为国内科技馆同类科学展品的设计创新起到一定参考和借鉴作用。
关键词 视觉识别系统 运动控制系统 人工智能 冰球机器人
0 引言
集成计算机高精度视觉识别系统与运动控制系统,是现阶段智能设备设计与改造中的热门应用技术之一,该系统通过计算机技术、自动控制技术和图像采集处理技术,利用高清相机对目标进行寻找并驱动电机对执行机构采取运动控制,以实现对预定运动目标的处理,能够大幅提高机器智能化水平,在工业生产和社会生活中被广泛运用[1]。与此同时,通过科技馆中的科普项目来展示相关复杂技術也成为一种易于被大众接受的新型传播途径。
本文正是基于高精度视觉识别与运动控制系统的理论基础,并以“冰球机器人”的研发成果为例,展示一种人工智能的,能够感知、预测、决策和协调运动的,真正实现与人类体育竞技对抗的自动化智能机器,以期能为科技馆同类科学展品设计创新起到一定的参考和借鉴作用。
1 研究背景分析
机器人展品是科技馆展品的重要组成部分之一。机器人技术融合了机械、电子、传感器、计算机、人工智能等多学科知识,代表着机电一体化的最高成就,是目前科学技术发展最活跃的领域之一。在日本,人们认为机器人是任何高级的自动化机械;欧美国家则指出,机器人应该是有计算机控制的,通过编排程序具有可以变化的、多功能的自动化机械[2]。国际标准化组织给机器人下的定义为:一种可编程和多功能的用来搬运材料、零件、工具的操作机或是为了执行不同任务而具有可改变的、可编程动作的专门系统[3]。
通过对国内外50多家大型科技场馆进行问卷调查统计,了解到80%以上的观众对机器人技术充满期待和兴趣,特别是机器人的高精度、灵活性技术,机器人平衡技术,仿生机器人技术,拟人型机器人等受到广大观众的关注[4]。但是,目前科技馆行业同类机器人互动方式的产品一般采用机械臂形式,成本高、无机械传动机构,无法体现机电软件一体化的科普功能,且存在表现形式落后、缺乏互动性和创新性等诸多问题,难以满足公众探索机器人技术的兴趣和愿望,也无法系统展示机器人技术的构成和发展[5]。因此,探索机器人展品研发规律具有十分重要的现实意义。
2019年第九届芜湖科博会中,全新优化设计的冰球机器人首度亮相,得到业内人士和市民群众的广泛关注。本展项为人机互动的竞技游戏装置,冰球机器人通过捕捉冰球运动位置,实时计算出预测的轨迹并即刻做出相对的反应。当参与者按下“开始”按钮后便可取出冰球开始击球,同时相机高速检测冰球位置,记录当前时间和位置;连续记录3个位置后,AI系统计算出冰球的运动速度和方向,结合电机的位置和运动速度,计算出最佳碰撞点和碰撞时间,驱动电机动作;冰球进入对方球门后,传感器做出判断得分并显示到屏幕上,冰球则通过回球轨道落回到指定位置,方便参与者取出;当得分达到设定规则要求后,比赛结束,系统显示比赛结果。
目前国内科技馆中大多数机器人都是通过表演动作来展示效果,形式较为单一[6],而本装置基于高精度视觉识别与运动控制系统,通过参与者直接和机器人进行人机交互趣味比赛,让观众更直观感受到机器人的运动控制和处理能力,惊叹于冰球机器人精准动作的神奇之处。如此,通过机器人展品将观众单一的输入导出为多种输出,使展品本身具备更持久的生命力。
2 展项基本描述
冰球机器人是一个集高精度视觉识别、人工智能和高速运动控制于一体的互动科普装置,主要由台体、冰球机器人、防护机构组成,它利用外部感知技术实现机器人动作控制。观众手持互动装置,点击开始按钮,与机器人开始冰球对战,同时屏幕显示对战时间和得分情况。利用2台伺服电机、运动轨道、1台工业相机和上位机组成控制系统,采用气浮台面模拟实际冰球低摩擦运动,结合灯光、回球轨道、台体和半封闭防护罩组成一个冰球机器人。比赛时机器人通过工业相机识别跟踪冰球动作,通过AI计算判断出最佳击球位置、时间和速度,控制挡块准时运行至指定位置将球击回,当传感器检测到球进球门后回合结束,从而完成一场冰球比赛过程。
如图1所示,参观者参与时,通过点击开始和难易程度按钮,启动游戏,然后手拿击球器将球片击打向机器人方向,系统摄像头将采集球片数据,并通过算法控制机构动作,将球准确无误击回参与方,以此反复,直至一方进球,球片通过回收机构转至台体前端,参与者拿起球片进行下一场比拼。当单方进球满5个时,则游戏结束,显示屏实时显示击球轨迹画面和得分情况。
[图1 冰球机器人展品效果图]<O:\Macfile-f\CY\2019年\科学教育与博物馆\2019-5\图\高精度视觉识别-1.tif>
如图2所示,本展品包括七个部分,主要模块名称分别为:冰球互动击球机构、球片浮动平台、球片回收机构、摄像头采集部分、计算机部分、显示器部分、多媒体部分。摄像头部分进行球片运动轨迹采集并输入计算机部分,计算机部分控制冰球互动击球机构进行击球,并将得分结果输出到显示器部分。球片在浮动平台上小阻力运动,并通过球片回收机构回收至台体前端。
如图3所示,冰球互动击球机构由伺服电机、同步带、X向滑轨、Y向滑轨、击球部分、主动轮、张紧从动轮、换向轮等部件构成。机构启动时,左右伺服电机带动主动轮转动,击球部分在同步带的带动下,通过从动轮和换向轮实现动作。机构通过左右电机的转向和速度差值实现击球部分的X向、Y向、斜向运动,并结合程序算法实现互动击球。
计算机部分由计算机、电机控制器构成。计算机通过摄像头采集数据,运用算法控制伺服电机的启动与停止。摄像头采集部分由摄像头、摄像头固定支架组成。摄像头对运动中的球片进行图像采集,并将数据输入到计算机,计算机中的程序通过算法算出球片运动轨迹。显示器模块,显示器模块显示当前互动游戏的得分情况。
本展项设计特点:(1)利用高速工业相机动态跟踪冰球运动;(2)根据三点计算冰球运动轨迹,计算出冰球的速度和方向;(3)采用补光技术,降低外界光源对冰球识别造成的影响;(4)采用半封闭结构,运动控制部分和参与者隔离开,安全性高;(5)采用CoreXY连接方式组合2台伺服电机,结构简洁,运行速度快;(6)采用气浮机构消除桌面摩擦力,模拟冰球真实动作。
3 原理阐释与难点解决
冰球机器人主要由机械运动机构、伺服运动控制系统和视觉系统构成,是一个以CoreXY结构为主体的机器人,它利用工业数字高速摄像机视觉系统,对桌面图像实时监测,利用图像处理技术锁定冰球的坐标位置,通过不同时刻图像的差异比对,计算出冰球的运动轨迹并推导出冰球的运动方向,然后由伺服運动控制系统控制机械臂高速并准确的移动到预计位置上拦截并击打冰球,实现冰球桌面互动的人机对战。
经研发团队经测试,预估观众击球的速度可达到5 m/s以上,台面的总长度是1.2 m,观众操作区域长度是0.4 m,实际机器人监控有效区域是0.8 m,所以当观众击球后,机器人从识别冰球到反击成功的最大时间只有0.16 s。若要冰球机器人赢球,那么对其快速定位和运算识别功能则有很高的要求,亟待解决的就是电机运动速度跟不上、识别速率较慢、吹风不均匀导致桌面阻力大等难题。
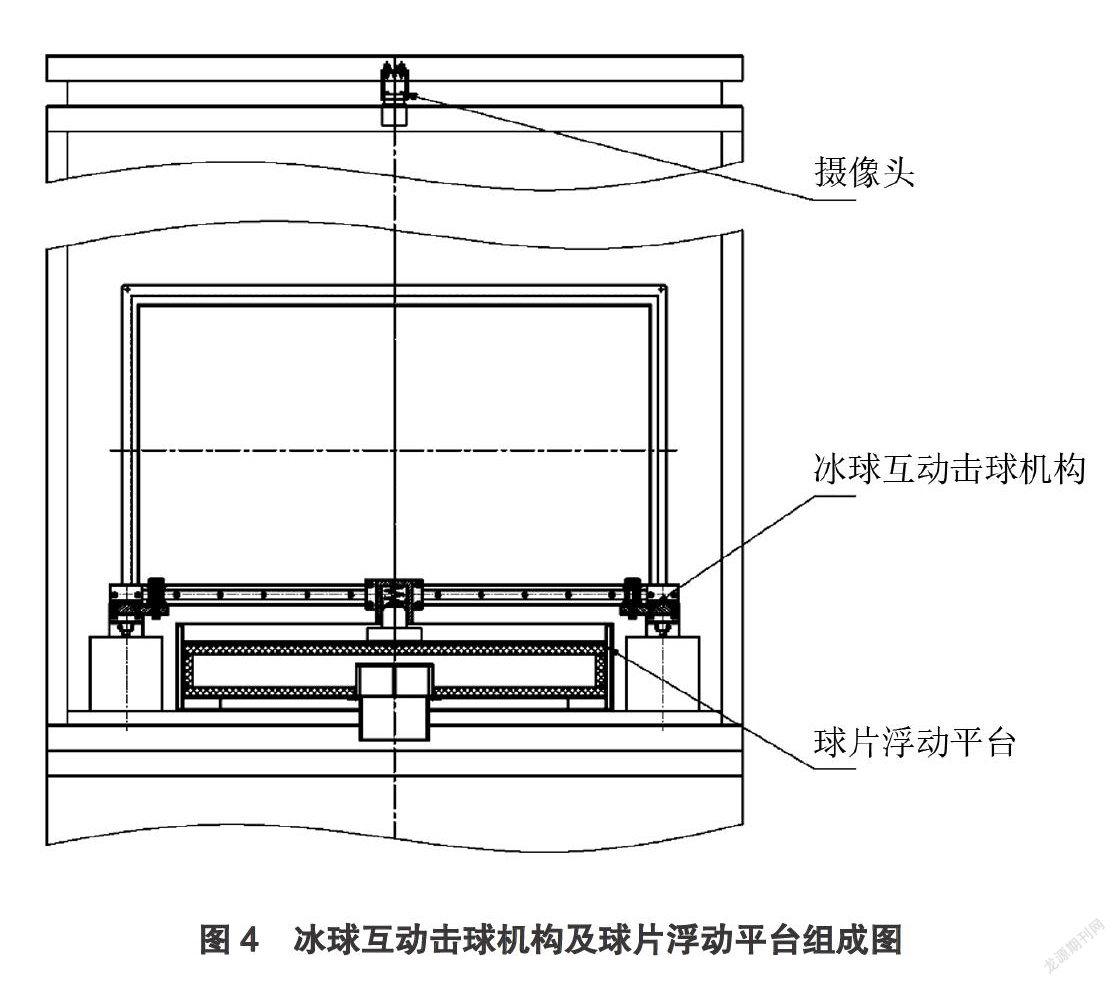
通过反复的性能提升与方法改进,研发团队采用USB 3.0高清工业相机,最高速度达210 fps(每秒帧数),图像清晰度高,辅以采用OpenCV 3.0专业图像处理技术,采用金字塔法同时生成一张大图和一张小图,结合帧差法,在小图中快速识别运动物体,确定运动范围,并在此范围内通过在大图来识别定位冰球的精确位置。利用金字塔法,则可在实现冰球快速定位的同时还能保证识别精度。另外,将工业相机安装在台面正上方,周围布置了补光系统,降低外界光线对冰球识别的干扰。经试验,在相机采集过程可以同步实现冰球定位,识别速度达到相机最高速度110 fps,也就是机器人不到0.01 s就能捕捉画面、找准冰球,再计算出反击位置,并控制电机的运动速度和轨迹,进行击球,如图4所示。
除了高精度视觉识别系统,还需要准确快速的运算控制系统——建立冰球运动模型,结合相机定位冰球实际运动位置,计算其运动轨迹并快速做出反应。冰球机器人采用CoreXY连接方式组合2台伺服电机,结构简洁,运行速度快,由于通过运动控制卡直接控制电机,进一步消除计算机与电机通讯延时。如,以计算出球位置到机器人击球位置距离0.6 m,冰球速度2 m/s为例,时间差10 ms,末端距离差20 mm,识别角度偏差1度末端误差就是10 mm。同时,还可通过设置电机最大运动速度和反击位置选取方法,来改变游戏模式的难易程度。
此外,冰球台面排列许多整齐的气孔,系统工作后有气流喷出,而冰球下方为凹面,气流冲击凹面时就可以将冰球浮在台面上,消除了台面与冰球的摩擦力,即可真实模拟实际冰球在冰面上的光滑运动,大大减少了运动阻力。同时,安全性也是展品展项设计中的必备要素。本展项整体采用半封闭结构,将包含运行轨道的运动控制部分用钢化玻璃进行封闭,只留缝隙供冰球运动,防止高速运动的机构撞击到参与者,消除安全隐患。
我们通过机器人技术互动体验系列展品展示关键技术研发,探索出机器人展品研发应遵循的普遍规律总结如下:(1)充分做好现状调查,理清机器人技术的发展方向和科技馆目标需求,确定展示内容与特殊要求。(2)将机器人研发与科技馆展示技术相结合,确定互动展示形式。(3)对展品进行详细的功能分析,根据展示性、体验性和安全性确定展品组成与结构。(4)机器人展品的整体设计需满足安全可靠、维护方便、成本合理等要求。(5)同时注重操作的可重复性,科技馆人流量大、展品使用频率极高,要求展品体验满足不同受众群体的使用习惯,演示现象和效果在合理的时间内能够重复再现等。
4 结语
现阶段,国家把科普基础设施工程列为实施全民科学素质行动计划的四大基础工程之一,良好的政策给我国科技馆事业带来前所未有的发展机遇。与此同时,科技部也按照国家重点研发计划统一部署,启动“智能机器人”重点专项工作。展品展项是科技场馆长久发展的生命基石,而随着科普场馆战略地位的逐步提高,社会各界对机器人展品的创新也有了更高的标准和要求。
冰球机器人是一款充满竞技智慧的高科技展品,重点展示人工智能在自动程序设计、视觉感知、反应控制等诸多领域的相关技术。通过把“高高在上”的机器人展品与人们熟悉的日常生活、休闲运动相结合,进一步为大众创新提供支撑。希望此次创新实践对同类机器人展品研发和全国科技馆展品建设能够起到一定的借鉴作用,特别是在快速定位和优化运算识别等互动机器人关键技术研发方面,并借此引发业内对一系列机器感知和控制技术的深入探索和相互交流。此外,我们也将继续致力于利用前沿技术推动科学知识的普及与传播,使科学更加平民化、更具亲和力,实现科技馆展品研发的新局面、新形势。
参考文献
[1]谢妤婵.视觉目标识别与三维定位关键技术的研究[D].天津:天津大学,2009.
[2]Anna Annusewicz. The use of vision systems in the autonomous control of mobile robots equipped with a manipulator[J]. Transportation Research Procedia, 2019, 40: 132-135.
[3]井超超.輪式机器人运动系统设计与研究[D].西安:西安电子科技大学,2012.
[4]孙帆.机器人展品研发规律研究[J].机器人技术与应用,2018(1):41-43.
[5]杨扬.基于机器视觉的服务机器人智能抓取研究[D].上海:上海交通大学,2014.
[6]张欣.智能乒乓球发球机器人[D].厦门:厦门大学,2014.
Abstract Based on the theoretical basis of high-precision visual recognition and motion control system, this paper briefly introduces the development status and principle methods of robot intelligent exhibits. Combining the research and development results of an intelligent "ice hockey robot", the operation principle and function of the industrial digital high-speed camera visual recognition system and servo motion control system are expounded. It is proposed to develop a complete ice hockey robot motion servo platform and realize real-time intelligent control. The focus is on the design of the robot vision system and the solutions to the technical difficulties. The purpose is to provide a reference for the innovation of scientific exhibits in the same category of domestic science museums.
Keywords visual identification systemmotion, control systemartificial, intelligenceice, hockey robot
猜你喜欢
儿童故事画报(2022年3期)2022-04-27
作文周刊(高考版)(2020年12期)2020-05-28
科学Fans(2019年6期)2019-07-26
商界(2019年12期)2019-01-03
故事作文·高年级(2018年11期)2018-11-19
IT经理世界(2018年20期)2018-10-24
中国经贸聚焦·英文版(2017年9期)2017-09-26
小康(2017年16期)2017-06-07
IT经理世界(2017年6期)2017-03-29
南风窗(2016年19期)2016-09-21
