
基于四臂协调控制的魔方还原系统设计与实现
2019-09-10 07:22郝崇清过仕安焦敏马海港于清超赵宇洋
河北工业科技 2019年4期
关键词:协调控制
郝崇清 过仕安 焦敏 马海港 于清超 赵宇洋



摘要:为了解决舵机本身旋转角度的限制、滑轨机械自由度的限制,以及在四机械臂的机械限制下能够协调控制旋转魔方6个平面的问题,针对魔方结构建立易于控制的位置状态模型,通过切换魔方位置状态控制其所有平面。建立舵机及机械臂的状态模型,进而针对建立的模型设计四机械臂协调控制算法,有序执行魔方的各个旋转操作。通过设计控制电路、舞台演示模块、滑轨机械臂、U型机械手等模块完成系统硬件搭建,并根据四机械臂协调控制算法设计了完整的控制程序。结果表明,系统通过四机械臂协调控制算法能够在现有机械结构的限制下流畅地将一个任意打乱、任意放置的魔方还原,实现教学演示与科普展示的推广使用。系统中的颜色识别和机械手的协同控制部分为其他分拣装配提供了新的思路,对无人自动展示装置等设计也具有一定的参考价值。
关键词:机器人控制;魔方还原;协调控制;控制模型;U型机械手
中图分类号:TP249文献标志码:Adoi: 10.7535/hbgykj.2019yx04009
Abstract:In order to solve the limitation of the rotation angle of the servo, the limitation of the degree of freedom of the mechanism of the slide rail, and the problem of coordinated control of the six planes of the Rubik′s cube under the mechanical constraints of the four robot arms, an easy-to-control position state model is established for the Rubik′s cube structure, and the function going to all the planes of the Rubik′s Cube is realized by switching position states. The state model of the servo and the robot arm is established, and then the four-armed coordinated rotation control algorithm is designed to perform the rotation operations of the Rubik′s cube in an orderly manner. The system hardware is built by designing the control circuit, the stage demonstration module, the slide rail arm, the U-shaped robot and other modules, and the complete control program is designed according to the four-arm coordination control algorithm. The results show that the system can smoothly restore an arbitrary chaotic and arbitrarily placed Rubik′s cube under the restriction of the existing mechanical structure through the four-arm coordinated control algorithm, and realize the promotion of teaching demonstration and popular science display. The part of color recognition and coordinated control of the robot in the system provide new ideas for other sorting assemblies, and also have certain reference value for the design of unmanned automatic display devices.
Keywords:robot control; Rubik′s Cube restoration; coordinated control; control model; U-shaped robot
魔方還原是一项备受人们青睐的智力运动。三阶魔方(Rubik′s Cube)最早于1974年由匈牙利布达佩斯建筑学院的厄尔诺·鲁比克(Ern Rubik)教授发明,是目前最主流的魔方种类[1]。魔方的造型十分奇巧,共有6个中心块、8个角块和12个边块,所有块构成魔方整体,整面旋转不会影响其他面的位置,魔方整体亦不会散[2]。魔方表面附有颜色贴纸,常见颜色贴纸是:白对黄,蓝对绿,红对橙。魔方的初始状态一般是每一个面9个方块同色。通过旋转不同的面,可以将魔方颜色打乱。通过这种旋转方式,三阶魔方可以具有4.3×1019种不同的状态。常见的智力运动就是将一个打乱的魔方还原回各个面同色,为此自从鲁比克教授发明魔方以来,对魔方还原的探索就从未停止过。目前人为手动还原的常见方法有层先法、角先法、棱先法、桥式方法、CFOP等方法[3]。对于计算机这样的方式往往由于步数过多可能并不合适,目前大部分算法都会涉及到群论知识,群论对于魔方的表示有很大关系[4-5]。梁小龙[6]探讨了主流算法中更适用于计算机还原的算法,其中Thistlethwaite Method算法更为合适。魔方最少还原步数被称之为“上帝之数”,经证明最多不超过20步即可还原一个被任意打乱的魔方[7]。
第4期郝崇清,等:基于四臂协调控制的魔方还原系统设计与实现河北工业科技第36卷为减少机器还原冗余较多的还原步骤,在本文中采用四机械臂设计的魔方还原系统。但四机械臂设计存在着一定的限制,在四机械臂的情况下需控制魔方的6个平面。同时,舵机的旋转角度与机械臂的自由度同样存在着一定的限制。目前针对四机械臂魔方旋转协调控制算法的相关文献报道较少。因此,针对现有系统机械上的控制限制,本文在文献[8]的基础上提出了四机械臂协调旋转控制算法,建立相关的控制模型,用于四臂协调配合有序执行魔方的还原步骤。
为强化系统演示效果,本文在文献[9]的基础上提出微观化舞台理念,引入电气控制元素,以适应科普推广、教学演示的功能需求。
1系统结构框架
1.1系统功能
魔方演示还原系统主要包含以下2个方面的功能。
基础功能是将一个任意打乱放置的魔方还原到每一个面9个方块同色的初始状态。这将涉及以下功能的实现:摄像头对魔方颜色的读取;上位机对魔方颜色的判断;上位机与单片机的相互通信;单片机对机械部分的控制;机械部分对魔方的旋转控制;硬件部分的电路控制。
特色功能是桌面化舞台效果演示。本文提出桌面化舞台效果的理念,将室外大型舞台所使用的灯光、升降台、音响等元素整合并微观化处理,打造桌面化的舞美效果,融入到演示系統之中,以强化本文系统的演示效果。这将涉及到以下功能的实现:升降舞台的设计与控制;灯光、音响的控制; 舞台元素的相互配合与流程控制。
1.2系统模块
本设计是具有教学演示功能的自动魔方还原系统。系统共由电源与电路模块、单片机控制模块、舞台演示模块、摄像头扫描模块、魔方还原机械模块、上位机算法处理模块等组成,如图1所示。
电源与电路模块:主要连接系统的控制器与各个硬件外设,负责供电与通信;
单片机控制模块:用于控制系统中的硬件外设,执行相应的功能流程,并负责与上位机的通信交流;
舞台演示模块:本系统中硬件外设的一部分,用于加强系统功能的演示效果;
摄像头扫描模块:本系统中硬件外设的一部分,与上位机连接通信,用于识别魔方颜色,获取魔方信息;
魔方还原机械模块:本系统中硬件外设的一部分,用于执行魔方旋转的相关操作;
上位机算法处理模块:用于处理魔方还原的相关算法,并负责与单片机通信,将执行步骤传回单片机。
最终完成的系统实物图如图2所示。
2系统硬件部分设计
2.1主体结构设计
装置的结构主体由20×20 mm型号的铝型材搭建而成,型材连接处皆有型材角件连接,坚固可靠。底座为3 mm厚的201不锈钢钢板底座,底板有1 cm边缘弯折以增强钢板整体强度。铝型材与钢板之间连接处放有橡胶垫,以避免铝型材与钢板之间直接摩擦。间架结构整体中心位于底座,上方机械结构转动时保证装置整体稳定不晃动。
采用型材制作间架结构能够使装置主体有较好的强度和稳定性;同时又具有较好的可扩展性,通过滑块螺母可以使其他硬件外设直接连接在型材上,十分方便。
2.2旋转执行机构设计
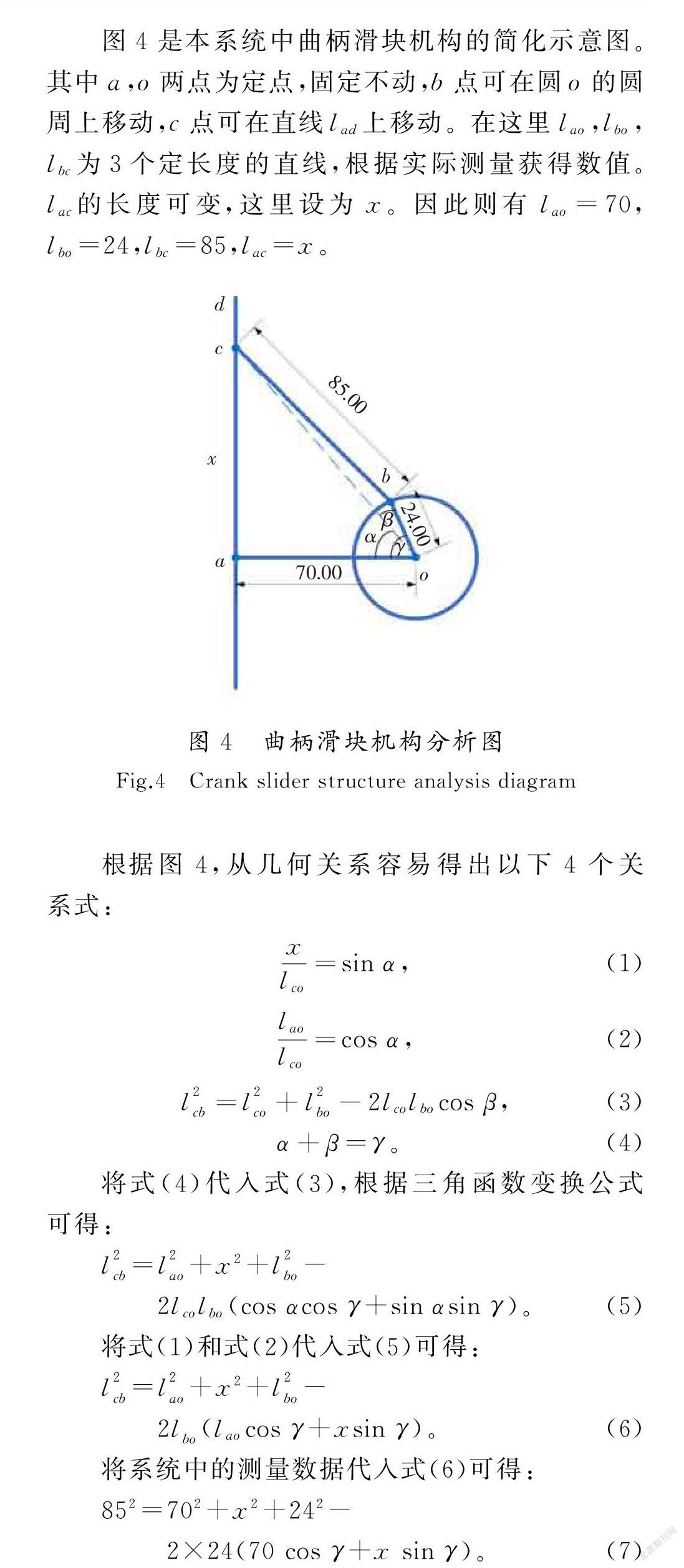
采用了带有孔位、便于安装的滑轨。该滑轨与铝型材通过滑块螺母固定。为了滑轨能够前后移动,在型材的另一侧放置舵机,通过构造曲柄滑块结构使滑轨能够前后移动。为了能使舵机能够固定在型材的侧面,在本装置中设计了特殊的舵机支架用于固定舵机。
使用球头拉杆将舵机与滑轨连接构成曲柄滑块机构[10]。球头拉杆的使用可以减少机械装置间拉动的摩擦,使得装置的耐用性更好。连接示意图如图3所示。
从图5可知,在γ = 1左右的地方(即γ = 57°左右),滑轨能达到的距离最大,约83.64 cm;在γ = 2.1左右的地方(即γ= 120°左右),滑轨能够回到末端。在γ =1~2.26(即γ=57°~130°),整个滑轨的移动随舵机旋转角度变化近似是线性的,也就是说当舵机旋转时滑轨滑动的反应会比较灵敏,并且在实际情况中,滑轨无需回到末端,移动的距离也并不长,这样的反应已经足够在本系统中使用。因此,这样的曲柄滑块机构在本系统中是可行的。
2.3舞台效果机构设计
舞台效果机构由直线推杆电机、自行设计的魔方托架、LED彩灯、扬声器等组成。直线推杆电机搭配魔方托架构成升降舞台;LED彩灯打造灯光效果;扬声器构成音响元素。
升降舞台在装置中的组合效果如图6所示。
2.4控制电路设计
文献[11]中阐述了其各模块控制供电的思路。出于对美观性和功能的考虑,本系统电路连接均采用“控制芯片-光电耦合模块/继电器模块-硬件外设”的连接模式,外电路共用一个电源的外设共地,每个电源之间为独立共地,控制电路信号端均与单片机共地,使用的光电耦合模块/继电器作用是对控制信号电气隔离,保护控制电路,防止外电路的回流烧坏控制芯片,同时防止信号干扰。
桥模块的控制输入信号电压要求(3.3~7.2 V),单片机输出端信号高电平为3.3 V,偶尔会造成信号遗失,所以在控制芯片和桥模块之间设计了一个电压放大电路,把控制信号升压到5 V。外设硬件电路连接框图见图7。
3系统软件部分设计
3.1U型机械手的状态模型建立及其控制
文献[12]—[13]的设计中均采用的双臂解决方案,文献[14]—[16]的设计研究中则采用的是四臂解决方案。出于对还原步骤冗余的减少,本文采用对称的四臂解决方案。
在本系统中,需要设计U型机械手的状态与控制模型,以便在程序中表示和控制机械手。建立模型的要求有:1)因为采用的舵机不是连续多周旋转的舵机,需要记录U型机械手的位置;2)需要设计的舵机旋转函数能够同时改变已经记录的舵机位置。
根据上述要求建立其状态模型,本文对机械手位置做出如下规定。
1)角度记录规定
因为U型机械手仅有-180°,-90°,0°,90°和180°等5种状态,因此规定用带符号的整数表示在不同状态下记录的U型机械手状态。U型机械手的角度记录规定见表1。
这样记录的好处是方便角度加减计算,以便在旋转函数中同时改变已经记录的状态。
2)状态记录规定
这里的状态是指U型机械手处于水平状态还是竖直状态。U型机械手的状态记录规定见表2。
记录U型机械手状态的目的是方便程序后续步骤检测机械冲突,防止U型机械手直接相撞.至此,U型机械手的状态模型建立完毕。
在程序中,需要给出的指令是某只U型机械手顺时针或者逆时针旋转一个度数,以完成旋转魔方的相关操作。同时,需要改变上面记录好的状态模型里的参数。
程序执行的流程如下:
控制函数中传入需要执行的指令,根据传入的旋转指令计算出状态模型里的2个新的参数。底层的舵机旋转函数能够让舵机旋转到指定度数。将计算好的新的角度参数传入底层舵机旋转函数,执行旋转功能。最后,用计算好的新的状态模型参数覆盖原有的模型参数,完成旋转命令的执行。
滑轨状态记录规定见表3。
滑軌仅有2种状态,即在前方与在后方,发出的指令也只有前进和后退2种。程序执行的流程如下:滑轨控制函数根据传入的指令计算出新的状态,交给底层函数执行,将原有的状态数据覆盖,完成执行。
滑轨的状态模型的存在意义是:滑轨在前方与在后方代表着当前U型机械手是否在抓握魔方。魔方要想在空中停留,一定至少需要2只机械手同时夹持魔方;当U型机械手本身需要调整角度时,不能抓握魔方。因此,通过检测滑轨的状态模型参数是否合适就可以确保是否与上述两条规则冲突。
3.2魔方的状态模型建立
魔方根据自身的位置和不同的旋转方式与旋转次数拥有着难以计数的状态数量。因此,为了方便控制,有必要对魔方的状态做出规定,建立魔方的状态模型。建立模型的要求有:1)通过模型能够推算出魔方所处的位置状态;2)尽可能规范减少魔方的状态数量以方便程序书写。
魔方的旋转操作都是以整个平面为单位,1次旋转1个平面。根据魔方的结构可知,无论旋转哪一个平面,中心颜色块都不会移动。因此,可以通过中心块颜色来规范魔方座位,从而能够获取魔方的位置信息,进而规范魔方操作。
在魔方的求解算法中,规定好一种座位能够大大减少代码的书写量,因此需要规定一个魔方的求解标准座位。同时,由于4只U型机械手的结构限制,只能同时转动4个平面,因此还需要规定特定的旋转操作座位。
在本系统中规定的标准座位如下:当正视于魔方的时候,绿色中心块所在平面冲向前面,白色中心块所在平面冲向上面。实际上,在市面上买到的魔方都有标准配色,当掌握2个不同面颜色的位置时,其余平面中心块的颜色也就能自然推出。
接下来,本文再规定特定的旋转操作座位。仅依据中心块颜色来区分魔方的位置状态,实际中魔方共由24种不同的位置状态。要对每一种状态写出不同状态下平面的操作,代码书写量会十分繁重且复杂。因此,需要减少操控的魔方位置状态以方便代码书写。
根据现有的机械结构,当魔方处于初始的标准座位时,仅能操控旋转前面(F)、后面(B)、左面(L)、右面(R),上面(U)和下面(D)不能操控。若想旋转上面(U)和下面(D),需要将魔方向左侧翻转一次就能操控,此时左面(L)和右面(R)不能旋转。因此,仅需要2种状态就可以操控到所有的平面(实际上,随意一种翻转方法都可以操控到2个之前不能旋转的平面,而其中2个之前可以旋转的平面又不能操控到)。
据此,本文在系统中规定了如下2个特定的旋转操作座位,如图8所示。
根据这种旋转操作座位的设置,系统只需让魔方在这2种位置状态之间来回切换,就可以操控到所有的平面。通过这种方式,将24种位置状态缩小到了2种位置状态,极大地提高了代码书写的便利性。至此,魔方的状态模型建立完毕。
3.3魔方的座位扫描算法
在本系统中,需要摄像头完整地逐次扫描魔方的6个面。因此需要设计一套逻辑算法,配合4只U型机械手,能够逐次扫描魔方的各个面,并且没有重复。
在设计中,需要注意的问题有:1)每一面都要扫描到,不能有遗漏;2)避免重复扫描。
先不考虑4只U型机械手的配合问题,只考虑各个面被扫描的先后顺序。
首先对U型机械手的旋转步骤做一个定义:U型机械手1次动作视为旋转1步。
也就是说,不论U型机械手是旋转90°,180°,270°还是360°,只要U型机械手动作1次,即视为旋转1步,与其旋转的角度和方向无关。这样的规定是因为每次旋转不同的度数时间差非常短;而来回切换不同的U型机械手涉及到多机构移动,会花费大量时间,相比之下仅因为旋转度数不同的时间差可以忽略。
为了减少U型机械手的旋转步骤,在每对U型机械手夹持1次魔方的情况下扫描2个面。因此本文设计出了固定顺序的扫描逻辑。在这种逻辑下,可以保证魔方的每一个平面都能被扫描到,不会重复。
该扫描逻辑如图9所示。
3.4魔方的座位还原算法
在本系统的设计中,要求魔方以任意位置放置复原。因此,对于任意放置的魔方要先将其还原回标准座位,才能继续配合程序执行还原过程。如何通过U型机械手配合摄像头使魔方回归到标准座位成为要先解决的问题。
在设计过程中,本文的设计思路还是力图通过减少魔方位置状态数来一步步缩小范围,最终还原回标准座位。基于这一思路,设计出了如下还原算法,流程图如图10所示。
在规定标准座位时提到,只需要知道2个面的准确位置,就可以根据标准配色推算出魔方位置状态。因此,只需先规定好一个固定平面,就能将位置状态数量从24种缩小到4种,此时再固定方向地扫描一面就很容易获取当前精确的位置状态,并根据当前状态设计还原至标准座位的步骤。
依托3.3小节设计好的魔方座位扫描算法,逐面不重复地扫描魔方每一面,直至寻找到绿色中心块面(扫描绿色中心块面的原因是绿色处于前面,这样便于编写还原步骤的代码)。此时将魔方向下翻转90°,可能出现的颜色仅有4种:白色、橙色、黄色、红色。此时只需针对不同的颜色情况编写不同的还原步骤即可。
3.5四臂协调控制算法
在介绍四臂协调控制算法前,先简要介绍一下魔方的旋转操作。
魔方共有6种旋转操作,每种操作都有3种衍生的操作,即顺时针旋转90°、顺时针旋转180°和逆时针旋转90°。6种操作分别是前侧旋转(F,F2,F’)、后侧旋转(B,B2,B’)、上侧旋转(U,U2,U’)、下侧旋转(D,D2,D’)、左侧旋转(L,L2,L’)和右侧旋转(R,R2,R’)。
在刘远法等[17]以及张艳珠等[18]的研究中简单给出了机械的控制流程。在本文中将进一步详细阐述四机械臂控制的具体算法流程。
旋转控制是执行还原命令的核心,设计出稳定的旋转逻辑能够连贯实现魔方还原步骤。在设计中,需要注意的问题有:1)注意4只U型机械手和4只滑轨的相互配合,避免冲突;2)收到不同的指令能够执行相应的步骤;3)模块化设计,方便接收到指令直接调用。
接下来介绍本系统中设计的旋转控制算法。在每一个步骤命令被调用时,都要经过下面3个流程:检测冲突、调整状态、执行步骤。
在执行旋转步骤之前,都要做好必要的冲突检测和状态调整,否则极易出现物理上U型机械手撞击或者与魔方冲撞等现象。若冲突检测结果为没有冲突,则无需调整状态。接下来介绍的每一个旋转逻辑函数都会从这3个方面介绍。
在介绍这些设计的逻辑之前,先简单介绍下本文设计的函数。根据命令需要设计了3类函数:初始化竖直夹持魔方函数、改变魔方座位状态函数、单一的魔方面旋转函数、魔方整体旋转函数。在后续的代码优化中,还设计了2个魔方面同时旋转的函数。
这里以典型的初始化竖直夹持魔方函数、单一的魔方面旋转函数为例列出流程图及其详细介绍,其余函数设计思路与之类似。
初始化竖直夹持魔方函数的功能是让一对U型机械手竖直地夹持魔方。所谓竖直地夹持,就是让程序中U型机械手状态模型里的状态记录为0。设计这个函数的目的是为了更方便地解决后续步骤里的冲突问题。当其中一对U型机械手竖直地夹持魔方时,另一对机械手无论是竖直状态还是水平状态,都可以直接夹持魔方,不会冲突。另外,当需要调整魔方位置状态时,也可以利用此函数为调整做准备。
初始化竖直夹持魔方函数设计的主要思路是:首先看需要初始化的U型机械手是否已经处于目标状态,即竖直地夹持魔方。若不在此状态,则需另外一对U型机械手先夹持魔方,再撤回需要调整的U型机械手,然后调整好再竖直夹持,完成逻辑。
由于函数本身就是一个调整函数,不执行旋转魔方的功能,因此只包含冲突检测和状态调整2个环节。函数执行的流程如图11所示。
魔方单一平面旋转函数是执行魔方旋转功能的核心函数。在主函数中,通过读取不同的步骤调用不同的旋转操作函数来执行旋转操作。各个操作旋转函数的执行思路大致相似。
在本系统中,共由4只U型机械手。在目前规定的两个旋转座位中,座位状态‘0’可以旋转左面和右面,座位状态‘1’可以旋轉上面和下面。前面和后面的旋转两个状态下都可以操作,无需考虑魔方座位状态。
魔方单一平面旋转函数的执行流程如图12所示。
3.6摄像头的颜色识别
梁炜等[19]探讨了几种颜色识别的空间模型及其算法;黄铭等[20]探讨了如何将RGB空间颜色识别应用于魔方颜色识别中;张金龙等[21]探讨了如何将HSV空间颜色识别应用于魔方颜色识别中。本系统结合MATLAB,采用RGB的空间颜色识别算法。
系统上位机MATLAB调用预连接好的摄像头执行拍照指令获取图像。根据获取的图像在MATLAB中生成图像的RGB三维矩阵。根据预设的图片位置取出相应色块矩阵的RGB值;根据预设的标准色块的RGB值对每一个像素点进行比对,比对的方式如下:
对魔方一个平面内某一色块采集到的全部像素判定,根据统计出的众数值确定魔方该色块的颜色,即识别完成。
关于魔方6种颜色的基准值取值,是在实验室环境下取预设位置的所用像素,对其求RGB 3个分量的平均值作为该颜色的基准RGB值。
图13为采用的RGB颜色识别模型。通过扫描魔方的各个标准颜色平面获取各个颜色标准值;在图中当前待识别的颜色在空间距离上与橙色的标准值最为接近,在当前模型下将该颜色判定为橙色。
3.7Thislethwaite Method算法简介
本系统中使用Thislethwaite Method算法作为魔方的还原解法。它与日常所使用的层先法等入门算法不同,打破了人们视觉上按照逐层还原的常规思路,将魔方颜色区分不同的优先级,将不同优先级的颜色相对还原后再整体还原魔方。该算法以群论作为理论基础,将魔方的各个旋转操作作为一个集合中的元素,该集合称为魔方群。通过群论中的置换运算获得子群,对魔方群逐步降阶,降阶后的魔方群中元素减少,代表魔方的混乱程度越小,魔方的状态数量减少。当魔方群降阶到单位子群时,魔方复原完成[6]。
4结语
在魔方还原系统的设计中建立了魔方的状态模型与U型机械手、滑轨机械臂的状态模型,在四机械臂及舵机旋转角度等条件限制下设计了四机械臂协调旋转控制算法,完整地设计了魔方还原系统的各个组成部分,结合算法最终实现了结合四臂协调控制的魔方还原系统设计。使用该算法,系统能够流畅地将一个任意打乱、任意放置的魔方还原,证明了算法的可行性。配合本文提出的微观化舞台理念,能够强化系统的演示效果,使得本系统适用于教学演示、科普展览等场景的应用。
本研究通过魔方与U型机械手的模型建立与算法设计实现了四臂协调控制复原魔方,给出了详细的实现方案。但设计的座位扫描算法、旋转控制算法并非是四臂协调的最优控制,对此仍有较大的探讨空间。
参考文献/References:
[1]哈金才,李若雪,哈瑞.魔方的数学模型研究及其应用[J].创新创业理论研究与实践,2018(19):83-86.
HA Jincai, LI Ruoxue, HA Rui. Research on mathematical model of Rubik′s Cube and its application[J]. The Theory and Practice of Innovation and Entrepreneurship, 2018(19):83-86.
[2]李世春.魔方里的科学和文化[M].北京:高等教育出版社,2015.
[3]李国军,钟志强,张毅宁.LEGO机器人魔方还原基本方法与过程[J].鞍山师范学院学报,2014,16(2):71-74.
LI Guojun, ZHONG Zhiqiang, ZHANG Yining. The basic method and process of Lego robot working Rubik′s Cube work[J]. Journal of Anshan Normal University, 2014, 16(2):71-74.
[4]李世春.魔方的科学和计算机表现[M].东营:石油大学出版社,2003.
[5]喻腾飞. 魔方群的研究[D].合肥:中国科学技术大学,2014.
YU Tengfei. Research of Rubik’s Cube Group[D]. Hefei: University of Science and Technology of China, 2014.
[6] 梁小龙. 解魔方算法的研究和系统实现[D].沈阳:东北大学,2013.
LIANG Xiaolong. Research and Realization of Rubik’s Cube Algorithm[D]. Shenyang: Northeastern University, 2013.
[7]卢昌海.魔方与“上帝之数”[J].金融博览,2014(11):26-27.
[8]田田,徐林,赵洪华,等.解魔方四爪机械手结构设计与操作[J].机器人技术与应用,2014(5):38-39.
[9]麦陵璧.微型舞台[J].教育导刊,1997(sup1):42.
[10]李亚南,王增胜,孔令云.基于MathCAD的曲柄滑块机构运动可视化研究[J].现代商贸工业,2018,39(31):191-192.
[11]古长军,张艳珠,邓宣金,等.魔方机器人硬件系统设计[J].电子制作,2015(13):81.
[12]李泽萱,滕旭阳,郑艺彬,等.基于Arduino的两臂解魔方机器人——算法设计[J].电脑知识与技术,2018,14(17):248-250.
LI Zexuan, TENG Xuyang, ZHENG Yibin, et al. The robot can restore the Rubik′s Cube based on arduino microcontroller: Algorithm design[J]. Computer Knowledge and Technology, 2018, 14(17):248-250.
[13]高達.基于STM32双臂魔方机器人的设计[J].电子产品世界,2018(11):51-53.
[14]左国玉,刘洪星,顾凌云,等.四面对称结构的解魔方机器人[J].实验技术与管理,2018,35(6):83-86.
ZUO Guoyu, LIU Hongxing, GU Lingyun, et al. Rubik’s Cube solution robot with four-side symmetrical structure[J]. Experimental Technology and Management, 2018,35(6):83-86.
[15]董海阳,魏巍.类人四轴解魔方机器人的设计[J].电子技术与软件工程,2013(8):62.
[16]向腊. 魔方机器人控制系统的设计与实现[D].长沙:湖南大学,2016.
XIANG La. Design and Realization of Rubik’s Cube Robot Control System[D]. Changsha: Hunan University, 2016.
[17]刘远法,周屹.基于Arduino单片机的解魔方机器人——控制部分[J].电脑知识与技术,2016,12(7):171-173.
LIU Yuanfa, ZHOU Yi. The robot can restore a Rubik′s Cube based on Arduino microcontroller: The control module[J]. Computer Knowledge and Technology, 2016,12(7):171-173.
[18]张艳珠,古长军,王凡迪,等.魔方机器人控制系统设计[J].沈阳理工大学学报,2016,35(3):41-46.
ZHANG Yanzhu, GU Changjun, WANG Fandi, et al. Control system design of magic cube robot[J]. Journal of Shenyang Ligong University, 2016,35(3):41-46.
[19]梁炜,申彦春,张银蒲,等.一种基于机器视觉的颜色识别算法的研究[J].电视技术,2011,35(23):129-131.
LIANG Wei, SHEN Yanchun, ZHANG Yinpu,et al. Method for color recognition based on machine vision[J]. Video Engineering, 2011,35(23):129-131.
[20]黄铭,陆思良,孔凡让.魔方还原机器人的视觉子系统设计与实现[J].机械与电子,2013(5):60-64.
HUANG Ming, LU Siliang, KONG Fanrang. Design and implementation of vision subsystem of Rubik’s Cube robot[J]. Machinery & Electronics, 2013(5):60-64.
[21]张金龙,邹裕龙,杨斌,等.基于二阶段双向搜索的解魔方机器人系统[J].计算机与现代化,2019(2):82-87.
ZHANG Jinlong, ZOU Yulong, YANG Bin, et al. Solving cube robot system based on two-stage bidirectional search[J]. Computer and Modernization, 2019(2):82-87.
猜你喜欢
中文信息(2017年3期)2017-05-22
中文信息(2017年3期)2017-05-22
魅力中国(2016年47期)2017-04-12
科教导刊·电子版(2017年6期)2017-03-30
科学与财富(2016年29期)2016-12-27
科技创新导报(2016年20期)2016-12-14
中小企业管理与科技·上旬刊(2016年10期)2016-11-15
中国信息化·学术版(2013年4期)2014-01-03
