EPS双星型绕组六相电机复杂驱动及采样时序设计
2019-09-10 12:14罗来军张善
汽车与驾驶维修(维修版) 2019年4期
罗来军 张善




摘要:随着自动驾驶级别趋于SAE L4/L5的级别,传统的电动助力转向(EPS)作为自动驾驶执行器的关键部件已无法满足功能需求,采用双路备份的安全冗余电机结构和电控方案已经受到业界广泛关注。本文提出一种应用于冗余式EPS的双星型绕组六相电机的电控驱动设计,公开阐明一种对冗余独立的双绕组的同步驱动、冗余输出及定时电流采样等方法。通过该方法可实现电机单侧驱动及采样的运行失效,系统依旧能够维持另一侧驱动的冗余独立地运行,达到失效可用性的安全运行模式,大大提高了车辆行驶安全性。
关键词:六相电机;复杂驱动;采样时序
中图分类号:U463 文献标识码:A
对于现代汽车而言,转向控制系统的电气化成熟发展并形成的基于一款电机的EPS电控驱动,一般采用检测到失效之后切断电机的驱动输出电路且将系统置为安全状态,之后驾驶员依然能够夺回汽车的控制权。但对于未来汽车而言,驾驶员的依赖将随着冗余度与多元化的增加而逐渐消失,失效保护( FaiISafe)模式将演化至失效后系统继续保持对汽车完全控制的失效可操作( Fail Operational)模式,由此对系统提出了供电电池系统、传感器、控制单元及执行器等冗余设计要求。因此,双星型绕组六相电机驱动及采样时序设计,是将传统应用中的永磁同步三相无刷电机(PMSM)的转子绕组形成双份备份,在电控策略及驱动输出时分别两路冗余的PWM独立控制且保持时序的驱动同步性,在采样电路中应用统一的定时时基触发的双电阻ADC采样时刻,保证了单侧电机绕组的相电流等信号采样的复杂度,提升了在EPS应用中的转向系统鲁棒性。
1 六相电机复杂驱动方案设计
本文根据冗余EPS软硬件架构的主从ECU设计,详解六相电机的转子冗余独立式结构[1],以及EcuA单侧“一拖二”形式的电机复杂驱动( Complex Driver)独立控制两组三相桥驱MOSFET电路的原理,最终实现对两组冗余独立绕组的PWM输出驱动功能。
1.1 冗余EPS硬件拓扑
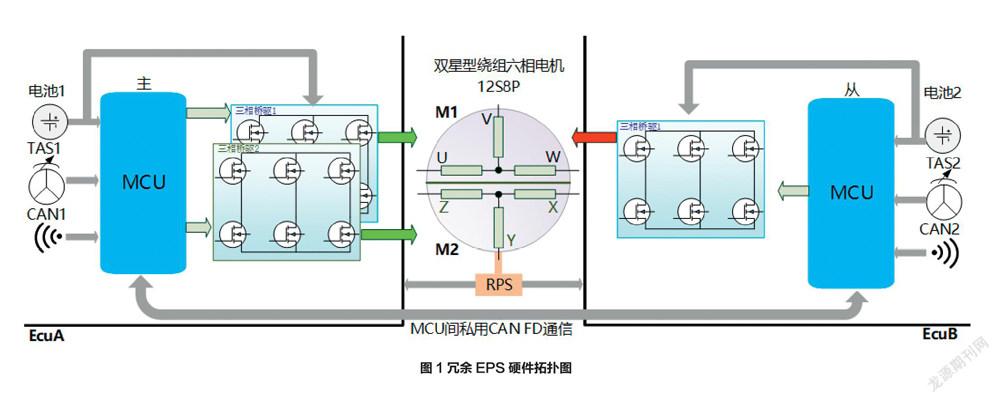
如图1所示,冗余EPS硬件架构的主要器件及功能包含有以下部分。
(1)冗余式EPS系统中供电电池、扭矩传感器、连接车身网络CAN与点火等信号、电机转子位置传感器和电控单元ECU等均采用冗余双份,保持传统EPS控制与诊断功能。
(2)电控单元ECU中由单片机作为主控电控单元[2],分别担当主、从控制角色,布置在双侧主、从控制器EcuA和EcuB内。
(3)系统正常运行时,由EcuA单侧的主MCU驱动PWM输出控制两组三相桥驱MOSFET电路。
(4)系统异常运行时,EcuA单侧诊断并确认故障后,通过MCU间私用CAN FD通信方式通知EcuB单侧功能接管。
(5) EcuA单侧切换至EcuB单侧功能接管成功后,EcuA单侧功能停止驱动PWM输出控制两组三相桥驱MOSFET电路,而EcuB单侧功能启动驱动PWM输出控制三相桥驱MOSFET电路。
其中,两侧的各三相桥驱MOSFET电路分别连接至六相电机的绕组M1和M2,即对于软件驱动方案而言,绕组M1视为uvw三相PMSM电机,而绕组M2视为XYZ三相PMSM电机,进行独立输出控制。
1.2 冗余EPS电机结构
永磁同步电机相数越多,控制的复杂度就越高。对于相数为3的倍数的电机,如六相电机,对其进行控制时,既可进行解耦控制,也可将其作为多组3相对称电机进行控制。因此,当电机相数为3的倍数时,电机具有更多的控制方法,更容易简化系统控制复杂度[3]。
本研究的EPS助力电机绕组以3的倍数作冗余。若电机相数为3的2倍,即六相电机。六相电机的绕组空间分布通常有2种:一种是对称六相电机(图2),可视作由2套相移60°三相绕组组成,称之为正六相电机;另一种是不对称六相电机(图3),可视作由2套相移30°三相绕组组成,称之为双三相电机。
在本文研究EPS产品的电机驱动应用中,采用的双星型绕组电机属于双三相电机,根据驱动目标的此种电气特性,即对于电机控制理论及方案而言,绕组M1视为UVW三相PMSM电机;而绕组M2视为XYZ三相PMSM电机,进行独立输出控制。
1.3 六相电机复杂驱动设计
在冗余EPS电機复杂驱动的功能架构中,对于EcuB控制桥驱电路来说,与传统的三相PMSM电机控制方案相同。本文仅详解EcuA侧对双星型绕组六相电机的驱动控制方法。
如图4所示,双星型绕组六相电机的uvw三相和XYZ三相分别由单片机的2个电机控制单元实现独立驱动输出PWM,2个电机控制单元均由定时器T12和T13组成。具体功能如下。
(1)将T12设置成中心沿对齐的计数模式,用于生成每组三相6路PWM输出。
(2) T13中断设置成左对齐的计数模式,用于生成采样延时信号。
(3)计数时,设置上升沿事件触发单片机采样单元VADC执行六相电机各采样信号的转换。
(4)通用定时器控制单元GTM,为2个电机控制单元提供启动计数触发源,由此可确保T12计数的同步性。2个电机控制单元中的T12输出12路PWM同步时基,T13定时延时采样仅由其中1个电机控制单元来实现即可,优点是保证了触发VADC的信号源唯一性,降低了对另一个电机控制单元重复配置的复杂度。
(5)每侧均采用双电阻低边采样方式,u/w和X/Z相分别经过运放后放大输入电压信号进行采样,采用RPS磁阻传感器采样六相电机转子的位置信号。
(6)六相电机各采样信号的采样时刻,与复杂驱动中的双三相12路PWNM输出紧密时序相关,这些采样信号主要有:U相零电流和相电流( IUO&IU),X相零电流和相电流( IXO&IX);W相零电流和相电流(IWO&lW),Z相零电流和相电流( IZ0&IZ);UV\N三相的相线电压( VphU,VphV,VphW),XYZ三相的相线电压( VphX,VphY;VphZ);电机转子位置传感器高精度电压信号( VSIN,VCOS),低精度冗余PWM占空比信号DPWM(由ICU捕获PWM占空比Duty值)。
如图5所示,六相电机复杂驱动中,设置占空比为一定调节频率,即在底层软件中由一定时长的中断作为时基TB( TimeBase),而电机控制算法为一定倍数时长同步段隙( Slot)软件调度周期,并且在TB 3内的电机控制算法中,将目标占空比设定为4个时基的占空比渐变输出方式,即TB 0-3分为4次PWM占空比渐变值生效。对于PWM占空比输出由电机控制单元的比较寄存器值a、b、c分别定时比较控制,并将单边上下MOSFET死区时间由预设寄存器DTM( Dead time module)自动完成。在软件最终实现上,仅通过3个占空值赋值到比较寄存器值a、b、c中,即可实现UVW/XYZ两侧共12路PWM的同步输出。
2 六相电机采样时序设计
2.1 六相电机信号与时刻关系
如图6所示,六相电机每侧的6个MOSFET处于PWNM驱动的TO (000)时刻采样零电流,对应图7中的零电流采样时刻,实际控制中的采样时刻位置均可通过寄存器设定延时并由采样定时器T13来完成。
2.2 六相电机采样时序设计
如图8所示,由采样定时器为T13调制输出脉冲采样延时信号的上升沿,作为VADC控制单元采样转换的触发事件源。即通过采样定时器T13将延时值预设的触发时刻,与ADC控制单元(或ICU)采样转换关联起来,分别在时序上的零电流采集时刻、相电流采集时刻和相电压采集时刻,完成获取全部六相电机的采样值。
2.3 六相电机控制及诊断时序
在EPS软件中,电机应用层包含电机控制算法和电机故障诊断2部分,采集到的各路采样值输入到2个功能单元中,最终实现电机正常运行。然而在硬件电路设计中,零电流和相电流的采样,对于单片机端子和板级电路而言,是相同资源的时序分时采样,对于这些相同的VADC采样通道必须及时读取ADC转换完成后的各Group中的采样值,以避免采样数据的覆盖。
如图9所示,本文设计的各当前TB的中断入口,分别根据需要读取前一个TB内的采样值,即TB 1入口读取4路零电流值;TB 2入口读取4路相电流值、RPS传感器转速相关信号值,并均输入至电机控制算法功能单元;TB 3入口读取6路相电压值,并输入至电机故障诊断功能单元。
3 六相电机驱动及时序验证
3.1 验证六相电机驱动功能
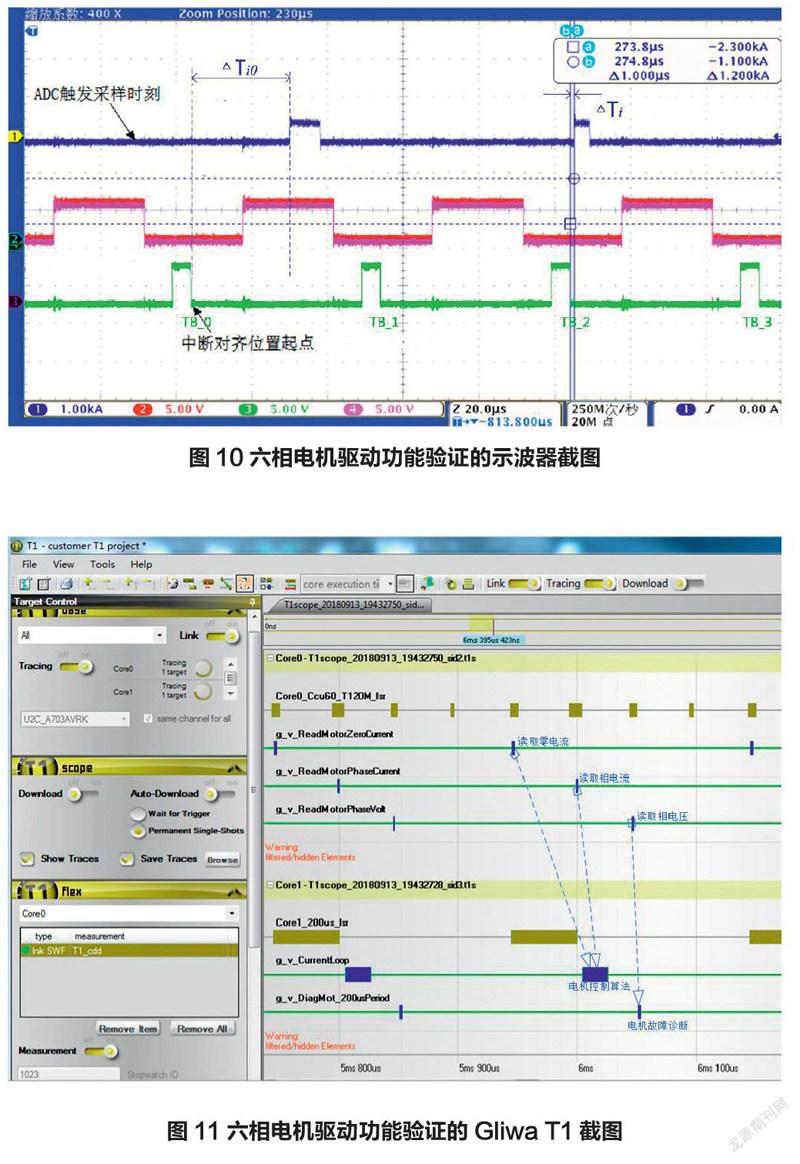
通过示波器分别捕获ADC触发采样的时刻位置、UVW三相的电机控制单元一侧的PWM输出、XYZ三相的电机控制单元一侧的PWM输出以及TB时基中断的波形。如图10所示,各采样延时位置、双三相复杂驱动同步性及中断系统定时驱动功能等均正确。3.2验证六相电机时序功能
通过德国Gliwa T1软件对函数体运行位置进行定位观测(图11),可视化的时间特性上位机界面中,可见六相电机实际运行时序均与设计预期完全一致。
3.3 六相电机主功能测试
通过Vector CANape观测软件运行过程中,六相电機驱动主要功能的电流实时数据、电机转子位置传感器RPS的转角解算值等信息。如图12所示,各观测数据更新正常,结果良好且达到预期的驱动和采样时序效果。
4 结束语
本文基于六相电机工作原理,从电机控制的驱动输出理论与电机采样时序设计2个方面,阐述在EPS产品中的应用方法,利用单片机内核2个电机控制单元独立双三相PWM定时器输出及定时延迟采样触发时刻的方式,实现了双星型绕组UVW/XYZ的冗余独立控制,且保证了时序上的同步性。进一步实验论证了软件运行中,六相电机零电流、相电流、相电压以及RPS传感器相关数据的有效性和设计的合理性。通过该设计应用将为推进冗余EPS六相电机在未来智能驾驶领域,转向执行器的安全和系统持续助力可用性提供技术保证。
【参考文献】
[1] 王玲文,赵荣国,艾永乐.六相感应电机定子绕组设计与计算[J].湖南工业大学学报,201 0,29(11):35-37.
[2] 谢辉,徐辉.英飞凌多核单片机应用技术:AURIXTM三天入门篇[M].天津:天津大学出版,201 7,09.
[3] 杨金波,杨贵杰,李铁才.双三相永磁同步电机的建模与矢量控制[J].电机与控制学报,201 0,14(6):1-7.