服务型机器人设计
2019-09-10 07:22谢坤
科学导报·科学工程与电力 2019年31期
关键词:智能
谢坤
【摘 要】机器人研究在我国开始的时间于20世纪70年代,与发达国家相比起步稍晚,随着中国的制造业不断的强大,大型企业越来越多,我国近年来市场不断的扩大,机器人市场的发展速度不断的提升。过去3年来,我国机器人市场发展迅猛,年均增长超过40%,增长率居全球首位。机器人主要分为服务机器人和工业机器人两大类,其中工业机器人应用比较广泛,比如搬运机器人,焊接机器人,喷涂机器人等。
【关键词】智能;服务机器人;自由度;电驱
1、设计目的及发展潜力
(一)设计目的
进入21世纪,中国经济和科学技术快速稳定发展,你人们生活生平不断提高,文化生活日益丰富多彩,对物质和精神文明有了更高的追求,因此催生出对智能服务机器人的刚性需求。
(二)发展潜力
我国政府对服务机器人的发展给予的很多的帮助和扶持,2014年4月1日中华人民共和国科学技术部印发服务机器人科技发展“十二五”专项规划的通知,以《国家中长期科技发展规划纲(2006-2020)》为指导,贯彻《国民经济和社会发展第十二个五年规划》精神,落实《国家“十二五”科学和技术发展规划》提出的重点任务。
2、智能服务机器人的功能及其动作
智能服务机器人主要功能是检测和感知用户的动作、语言,与机器人计算机系统储存的信息,数据进行对比,以作出控制、决策、管理、操作等命令,完成用户所需要求。
3、智能机器人应用场合
智能机器人可以应用在家庭,完成家庭生活琐碎的家务,可以看家防止盗窃;可以应用在相关职能部门办公大厅,起引导,分流,便捷的作用;
4、智能机器人的主体结构
(一)末端执行器
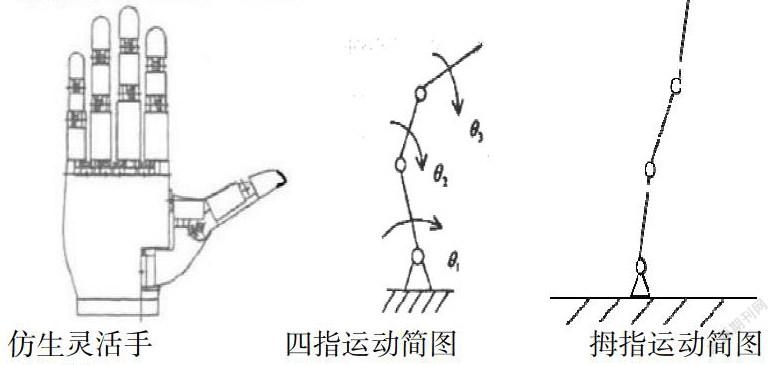
这款机器人采用仿人手的设计理念,结构如图(1),主要由近指节、滑轮、电位计、绊钉、中指节、远指节、底座、支板组成,还有各式的传感器,视觉传感器等。受驱动源、驱动电路板体积的限制,使驱动器与转动关节的空间距离较远且路径不规则,我们采用腱传动(绳索传动)。仿生灵活手共有五个手指,15个自由度,其中四个手指组成完全相同,每根手指共有三个关节,均使用仰俯转动副;因此它能模仿几乎人手指完成各种复杂动作。图(2)、图(3)是拇指和其余四指的结构简图;
(二)手腕
这款智能服务机器人我们采用的是三自由度BBR手腕,使手部具有沿X、Y、Z轴仰俯、偏转、翻转运动,即RPY运动。
(三)手臂
对于手臂的设计我们使用的是多自由度的复合运动手臂。
(四)基座
服务机器人应用的比较广泛,需要去解决人们生活中的琐碎,,为了满了人满的需求,在运动速度上面不能太慢,所以该机构采用了轮式移动机构。具有三个车轮,其中两只后轮为驱动轮,前轮为方向轮,该设计不仅具有良好的移动速度,同时机器人重心稳重,不易倒地。
5、智能机器人的控制技术
(一)工作原理
智能服务机器人控制系统有一下几个要素:输入/输出设备及装置、驱动器系统、计算机硬件系统及操作控制软件、传感器系统。控制系统的主要作用是根据用户的指令对机构本体进行操作和控制,完成作业的各种动作。
接口板A、B是上下位机通信的桥梁。上位机经过A、B接口板向下位机发送命令和读取下位机信息。A板插在上位机的Q-Bus总线上,B板插在下位机的J-Bus总线上,A、B接口板之间通过扁平信号电缆通信。
(二)关节位置伺服控制
从运动控制的角度看,上机位作运动规划,并将手部的运动转化成各关节的运动,按控制周期传给下位机;下位机进行运动的插补运算及对关节进行伺服控制。
(三)各类传感器
机器人既要对环境状态作出快速反应和分析判断,又要长时间持续工作,精确度要求高。对于第一代第二代的机器人来说无法实现,随着技术的发展,尤其的智能化技术和传感器技术的进步,为设计的服务机器人更好的智能行为打下了基础。
1)电位器式位置传感器
电位器式位置传感器由1个线绕电阻和1滑动触电组成。其中,滑动触电通过机械装置受被检测量的控制。当被检测的位置量发生变化时,滑动触点也发生位移。应变片加速度传感器
Ni-Cu或Ni-Cr等金属电阻应变片加速度传感器是由一个板簧支撑重锤所构成的振动系统。板簧上、下两面分别贴两个应变片,应变片守振动产生应变,其电阻值得变化通过电桥电路的输出电压被检测出来。
2)超声波式接近觉传感器
超声波接近觉传感器的基本元件是电声变换器。由于同一变换器通常既用于发射又用于接收,因此被测物体距离很小时,需要使声能很快衰减。使用消声器和消除变换器与壳体的耦合,可以达到这一目的。
3)导电橡胶压觉传感器
在硅中渗入铝粉或碳粉等导电粉末,硬化后制成硅橡胶。当物体与橡胶表面接触时,由于压力引起电位的变化,电信号转化成数字信号,再通过计算机系统的分析、决策,使执行器作出相应的动作。图六轴力觉传感器
4)电容式传声器听觉传感器
由固定电极和振膜构成一个电容,Up经过电阻R 将一个极化电压加在电容的固定电极上。但检测到声音的传入后,振膜随着时间不断的发生震动,振膜与固定电极间电容量随着声音发生进行变化,电容的阻抗也随之变化;与其串联R 的负载电阻的阻值是固定的,电容的阻抗变化就表现为a点电位的变化。
5)视频摄像头视觉传感器
视频摄像头是一种广泛使用的景物和图像输入设备,它能将景物、图片等光学信号转化为电视信号或图像数据。由于单个视频摄像头只能形成二维图像,故我们采取两个视频摄像头。
智能服务机器人要完成一个动作是一个复杂的过程,它必须经过机器人感知、决策、执行三个阶段。智能机器人的总体特征
(一)智能服務机器人的外貌特征
这款智能服务机器人它的手采用的是仿生灵活手,能完成类似于人类的各种动作;而手臂和手腕采用的是与一般智能机器人的机械结构;它的头部最大特点就是用于两个检测物体的红外线摄像头作为这款智能服务机器人的眼睛,头的两侧没有像人类一样的耳朵,取而代之是用于收集各种声波的听觉传感器机构。
(二)智能机器人的优缺点
优点:
1)这款机器人应用场合广,服务人群多,易于推广使用。
2)它的机械结构设计好,有较多的自由度,能完成各种动作。
3)它具有良好的感知、决策、分析及学习的能力,精度高,效率好。
4)移动速度快,执行能极强。
缺点:
1)体型笨重,外形设计不够完美。
2)由于使用时轮式移动机构,故不能完成上下楼的动作。
参考文献:
[1]李云江.机器人概论.机械工业出版社,,2014.
[2]孙增析.智能控制理论与技术.清华大学出版社1,997
[3]王炎.机械人控制技术.机械工业出版,1997
[4]孙志欣.智能轮式移动机器人的控制系统设计:(学位论文);辽宁:辽宁师范大学,2010
[5]应用机器人学:运动学、动力学与控制技术(原书第2版)机械工业出版,2018
(作者单位:中山市技师学院)
猜你喜欢
儿童故事画报·发现号趣味百科(2019年12期)2019-02-02
知识就是力量(2019年1期)2019-01-10
儿童故事画报·智力大王(2018年7期)2018-11-02
小猕猴学习画刊(2017年9期)2017-10-19
数学大王·低年级(2017年9期)2017-09-18
世界汽车(2016年8期)2016-09-28
创业邦(2016年4期)2016-04-15
小学生·多元智能大王(2015年6期)2015-07-10