
某L型片体小水线面双体船总体性能
2019-09-13 06:30陈登
船舶与海洋工程 2019年4期
陈 登
(701研究所 上海凌耀船舶工程有限公司,上海 201108)
0 引 言
提高船舶的耐波性一直是船舶设计人员和其他相关研究人员关注的课题。排水量小于1000t的单体船通常难以在恶劣海况下航行,即使是排水量大于3000t的船舶,其在恶劣海况下航行时的性能也较差[1]。为提高船舶的航行性能,满足日益增长的海上运输需求,人们在不断探索新的船舶设计概念,开发新船型,在此背景下提出了小水线面双体船型。
常规的小水线面双体船主要由水下船体、水上船体和支柱等3部分组成,其中:水下船体是完全浸没在水中的彼此平行的鱼雷状回转体,是浮力的主要来源;水上船体是包括上层建筑连接桥在内的所有结构;支柱穿过水面,在上体与下体之间起连接作用,横剖面较小。小水线面双体船具有甲板面积大、耐波性能和高航速下的静水阻力性能好及生存能力强等特点,广泛应用于海洋调查、客运和军辅等领域中。但同时也存在船体结构质量大、结构工艺复杂、建造和维护成本高等缺点。目前已有多个国家拥有小水线面双体船,比较典型的有“无暇”号、“海斯”号、“实验1”号和“北调993”等。
1 目标船船型
目标船是一艘为海上水声试验提供支撑的平台,在近海航区航行,定员100人。试验要求该船的航速为 0~6kn,耐波性优良,甲板面积大,舷侧可进行载荷收放作业。同时,能使试验设备(质量约 50t)在船上方便地被移动。
为满足目标船对甲板面积和耐波性的要求,考虑采用小水线面双体船型。但是,常规小水线面双体船对载荷变化极为敏感,建造过程复杂,无法满足目标船对大批试验设备上船、下船和船上移动的需求,因此常规小水线面船不能很好地适用于该项目。鉴于目标船对航速的要求并不高,考虑适当增大支柱体的水线面面积,在兼顾耐波性的同时降低对载荷变化的敏感度。同时,为适应舷侧作业需求,将片体设计为L型(见图1)。
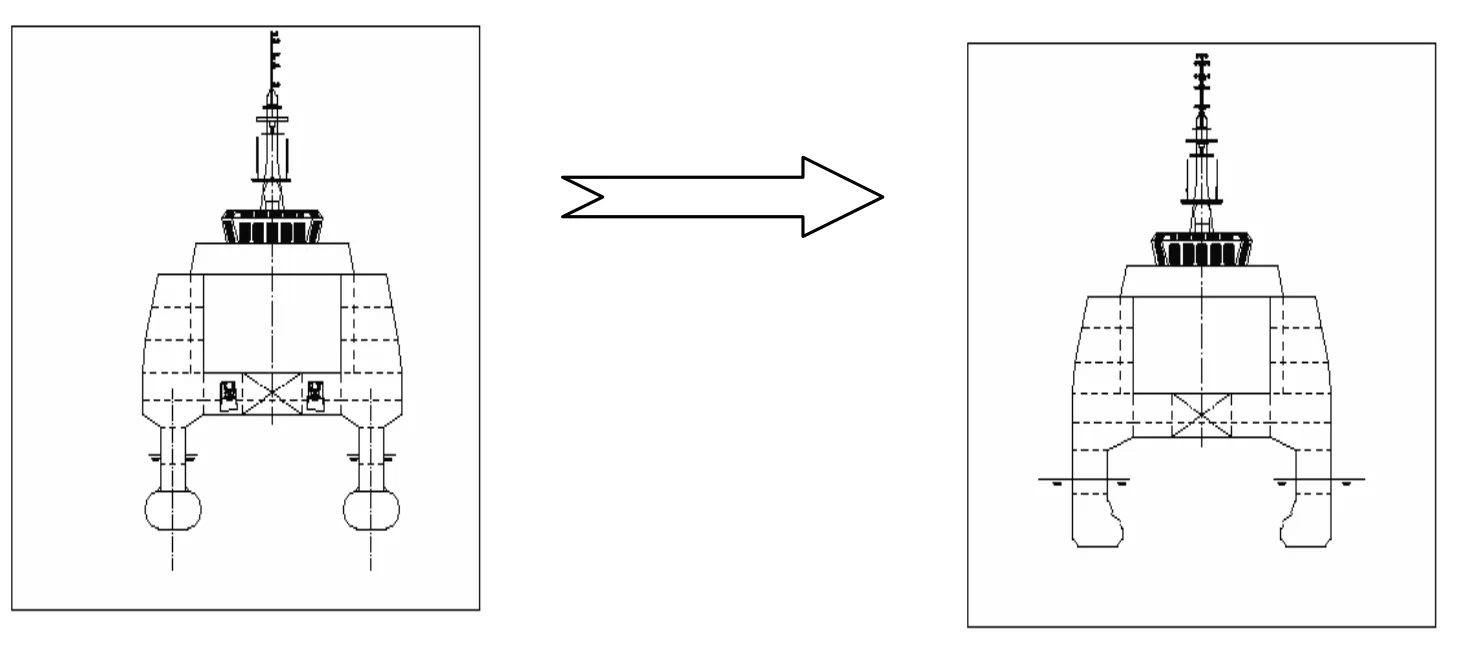
图1 片体形状
与常规非小水线面双体船和单体船相比,将片体设计为L型既能减小船舶的水线面面积,保证其具有良好的耐波性,提高其适应海况的能力、出航率和作业质量,为特种试验提供稳定的海上平台,又能克服小水线面船载荷敏感和建造复杂的缺点,同时有利于确保结构强度和提高支柱体空间的利用率。
该船主要参数见表1。

表1 目标船主要参数
2 船舶主要性能
船舶的总体性能主要包括稳性、耐波性、快速性和操纵性。
2.1 稳性
船舶稳性是保障船舶安全需考虑的一个重要因素。稳性可分为完整稳性和破损稳性,其中:完整稳性用来校核船舶在风、浪联合作用下抵抗倾覆的能力;破损稳性用来衡量船舶在1舱或数舱破损进水之后仍能保持一定浮性和稳性的能力,是判断船舶遭遇海难之后能否生存的重要指标[2]。
2.1.1 完整稳性
根据《国内航行海船法定检验技术规则》(2012)对双体客船的要求,对该船进行完整稳性计算,结果见表2。

表2 目标船完整稳性计算结果
由计算结果可知,双体船具有较大的初稳性高,抗风能力较强。
2.1.2 破损稳性
根据《国内航行海船法定检验技术规则》(2012)对双体客船的要求,该船需满足单舱不沉。采用确定性方法对该船进行破损稳性计算,得到设计状态下的计算结果见表3。

表3 目标船破损稳性计算结果
由计算结果可知,当单片体机舱段一舷破损时,横倾角较大。设计时,在满足机舱布置的前提下需控制机舱段的长度。
2.2 耐波性
船舶耐波性是指:船舶在波浪扰动下发生摇荡运动、砰击、甲板上浪、失速、螺旋桨出水和波浪弯矩等情况时仍能在波浪中维持一定的航速安全航行的性能[3]。
2.2.1 理论计算
针对与船舶耐波性分析有关的垂荡、横摇和纵摇运动响应,根据Wasim数值模拟结果绘制船体在不同有义波高和不同遭遇浪向下的有义单幅值曲线,结果见图2~图4。
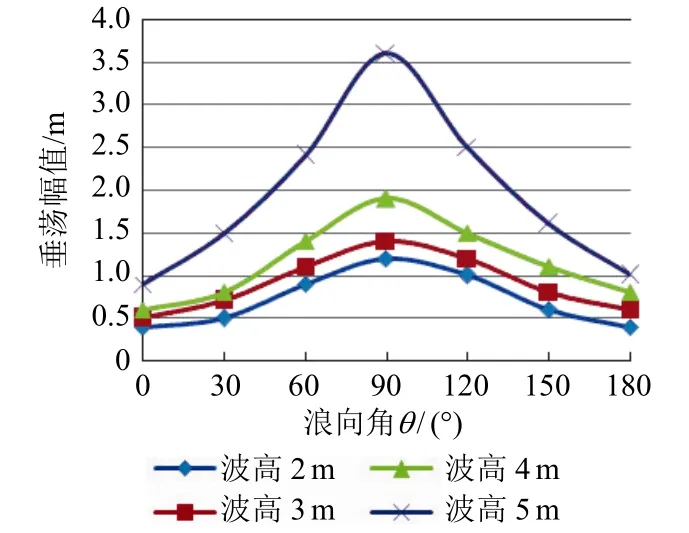
图2 垂荡有义单幅值曲线

图3 横摇有义单幅值曲线

图4 纵摇有义单幅值曲线
由图2可知:垂荡响应的有义单幅值在浪向角θ=90°时出现极值;当有义波高为2~4m时,在不同浪向下有义单幅值变化较小,最大幅值约为1.9m;当有义波高为5m时,有义单幅值变大且随浪向变化,在浪向为90°时出现最大垂荡有义单幅值,约为3.6m。当有义波高为5m时,波浪已砰击到船体下部,故会引起较大垂荡。由图3可知:横摇响应的最大幅值在浪向角θ=90°时出现,约为12°;最小值出现在θ=0°和θ=180°;在同一浪向下,有义波高增大则幅值增大。由图4可知:在浪向角θ=0°~90°的浪向下,纵摇幅值逐渐变小,最小值约为0.5°;随后纵摇幅值开始增大,纵摇有义单幅值最大约为6.5°。
2.2.2 水池试验
在水池对该船进行耐波性试验,包括带航速的迎浪和随浪试验和无航速的横浪和斜浪试验。根据规则波的试验结果,按照JONSWAP波谱进行不规则波耐波性预报,结果见图5~图7。

图5 垂荡有义单幅值曲线

图6 横摇有义单幅值曲线
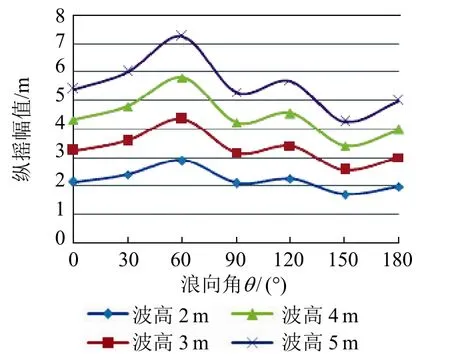
图7 纵摇有义单幅值曲线
由图5可知:垂荡响应的有义单幅值在浪向角θ=90°时出现极值,在2~5m有义波高范围内随波高的增大,幅值不断增大,最大幅值约为4.5m。由图6可知:横摇响应的最大幅值出现在浪向角θ=90°时,约为18°;最小值出现在θ=0°和θ=180°,约为0°;在同一浪向下,有义波高增大则幅值增大。由图7可知:船舶在遭遇斜浪时,纵摇幅值较大,单幅纵摇有义值最大约为7.0°。
垂荡和横摇试验结果与理论计算结果趋势基本一致,均是在浪向角θ=90°时出现极值,但幅值不同,试验结果比理论计算结果更大。纵摇试验结果表明,船舶在遭遇斜浪时,纵摇幅值较大。经实船航行验证,船舶的运动幅值与水池试验的结果较为吻合。
2.3 快速性
复杂的双体船型给阻力的理论估算带来了一定的困难[4]。以水池模型试验为手段,得到该船在设计吃水下的阻力估算结果见表4。
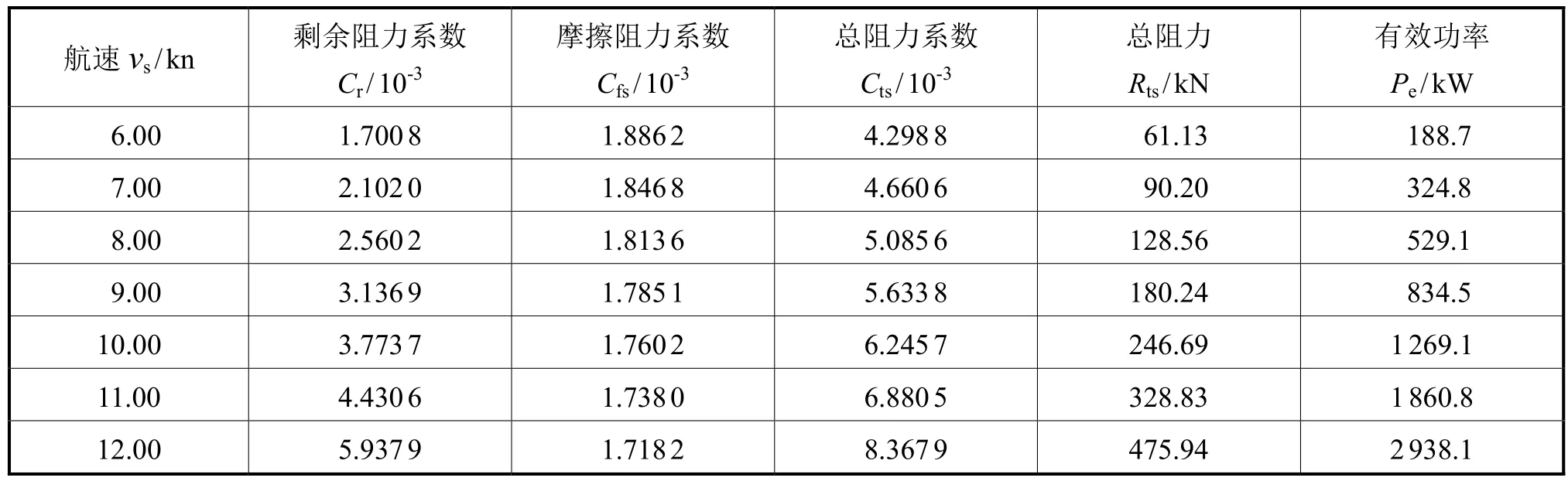
表4 目标船在设计吃水下的阻力估算结果
由表4可知,由于该船采用长平行中体,只有艏艉适当过渡的型线设计方式,因此其摩擦因数与同吨位的单体船相差不大,剩余阻力系数在高航速时远大于常规单体船。但是,该船主要运营在0~6kn的低航速范围区,因此其对运营经济性的影响是有限的。
2.4 操纵性
国内外相关学者[5]已针对双体船的操纵性开展很多研究,本文结合目标船的实船试航结果对双体船的操纵性进行分析。双体船的左右2个片体有利于保证其航向稳定性。船舶在直线航行时,左右2个螺旋桨可同时运转产生推力,起到推进船舶运动的作用。船舶回转时,2个螺旋桨与舵分别位于2个片体的尾部,且横向间距较大,故在一定的操舵角和正车、倒车的情况下可提供大的回转力矩和回转角速度,使船的航向稳定性和回转性均比较好。
该船稳定航行时,在双机、转速1000r/min下操舵35°的回转试验结果见表5。

表5 目标船回转试验结果
该船正车航行时,保持其舵角不变,稳定3min,用差分全球定位系统(Differential Global Positioning System, DGPS)测量其在双机、转速1000r/min和单轴推进(左)工况下的航迹和速度变化,结果见表6。
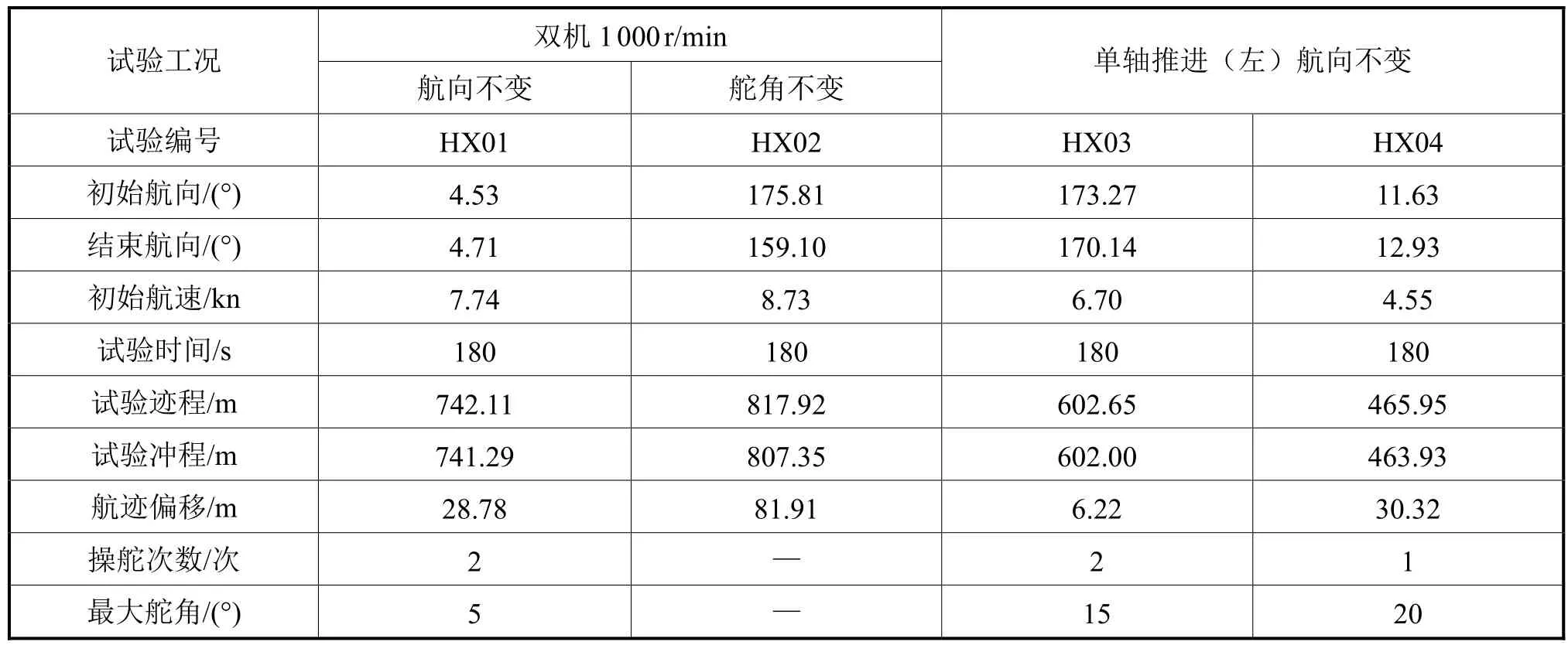
表6 目标船航向稳定性试验结果
3 结 语
由于小水线面双体船具有船体结构质量大、结构工艺复杂、建造及维护成本高等缺点,其发展受到了制约。目前正在营运的小水线面双体船数量远少于单体船,如何充分发挥小水线面双体船的效能尚待进一步研究。本文通过一系列仿真计算和模型试验分析,得出以下结论:
1) 通过软件计算可知,双体船的船宽大、初稳性高,因此完整稳性好,抗风能力强。但是,其左右不联通,一舷破损时即会发生较大的横倾,不利于保证其破损稳性。
2) 通过理论计算和模型试验可知,垂荡和横摇的试验结果与理论计算结果的趋势基本一致,但幅值不同,试验结果远比理论计算结果大。纵摇试验结果表明,船舶在遭遇斜浪时纵摇幅值较大。
3) 通过模型试验可知,小水线面船的湿表面积较大,因此其摩擦阻力较大。另外,双体船的快速性与其片体型线有很大关系,长平行中体的L型片体小水线面船的阻力性能不具有优势。
4) 由实船试航结果可知,双体船船长短、片体瘦长间距大,在一定的操舵角和正车、倒车情况下可提供较大的回转力矩和较高的回转角速度,因而其航向稳定性和回转性都比较好。
猜你喜欢
船舶(2022年4期)2022-08-20
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
船舶(2020年4期)2020-08-29
振动工程学报(2020年3期)2020-07-16
中国船检(2020年1期)2020-03-01
小天使·三年级语数英综合(2017年6期)2017-06-07
小天使·三年级语数英综合(2017年6期)2017-06-07
中学生数理化·高三版(2017年3期)2017-04-21
新农业(2016年5期)2016-05-23
