
多波束声呐声学参数校准系统设计
2019-09-16 09:27韩鸿胜柳义成窦春晖陈允约
水道港口 2019年4期
韩鸿胜,柳义成,窦春晖,陈允约
(交通运输部天津水运工程科学研究所 国家水运工程检测设备计量站,天津 300456)
多波束声呐凭借全覆盖高效作业的优势,成为水深精细探测的主要声呐设备。声呐设备性能的提高、频率范围的扩展和类型的增多对水声计量提出了许多新的要求,为保证海洋测量数据准确度,定期计量其探测性能具有实际的研究与应用价值[1-3]。声源级、工作频率、波束宽度和脉冲宽度属于多波束声呐基本的声学参数,与其反向散射强度、距离分辨力、声照范围以及测深准确度等性能紧密相关,以上参数应作为多波束声呐水声计量校准的主要指标。
1 校准系统设计
水声计量测试既要用到机械装置和电测量装置,又要涉及到水介质中声场,其量值不确定度要远大于单纯的几何、电磁、光学测量。目前,声压幅值的测量准确度只有±0.5~±3.0 dB[4]。为此,在建设水声设备校准系统时,必须要做到以下几点:(1)均匀各向同性且无边界影响的自由场条件;(2)发射器与水听器之间距离适当,既要满足测试对象的远场条件,又要保证高信噪比;(3)要有一套高准确度等级的计量标准器,用来采集、显示和记录测试中换能器产生的电声信号;(4)要有能精确控制测量距离、方位角等参数的位移机构和回转/升降装置;(5)整套校准系统量值传递与溯源路线科学可行。
1.1 消声水池
消声水池是开展水声计量校准的基础设施。JJF 1146-2006《消声水池声学特性校准规范》对消声水池的计量特性提出了具体要求,包括自由场区域、自由场频率范围、水池界面声压反射因数和水池内本底噪声[5]。
1.2 多维运行控制装置
多维运行控制装置架于消声水池之上,可实现精密回转、升降、水平位移等功能,是水声计量实验的主体执行机构。多维运行控制装置(图1)可安装多波束声呐换能器和标准水听器,并且可以精确控制二者之间的角度和距离,用于声学指标校准。角度控制最大允许误差±0.05°,位移控制最大允许误差为±0.1 cm。
1.3 计量标准器具
计量标准是指准确度低于计量基准,用于检定或校准其他计量标准或工作计量器具的测量标准。本校准系统应用的主要计量标准器具及配套设备技术要求如表1。
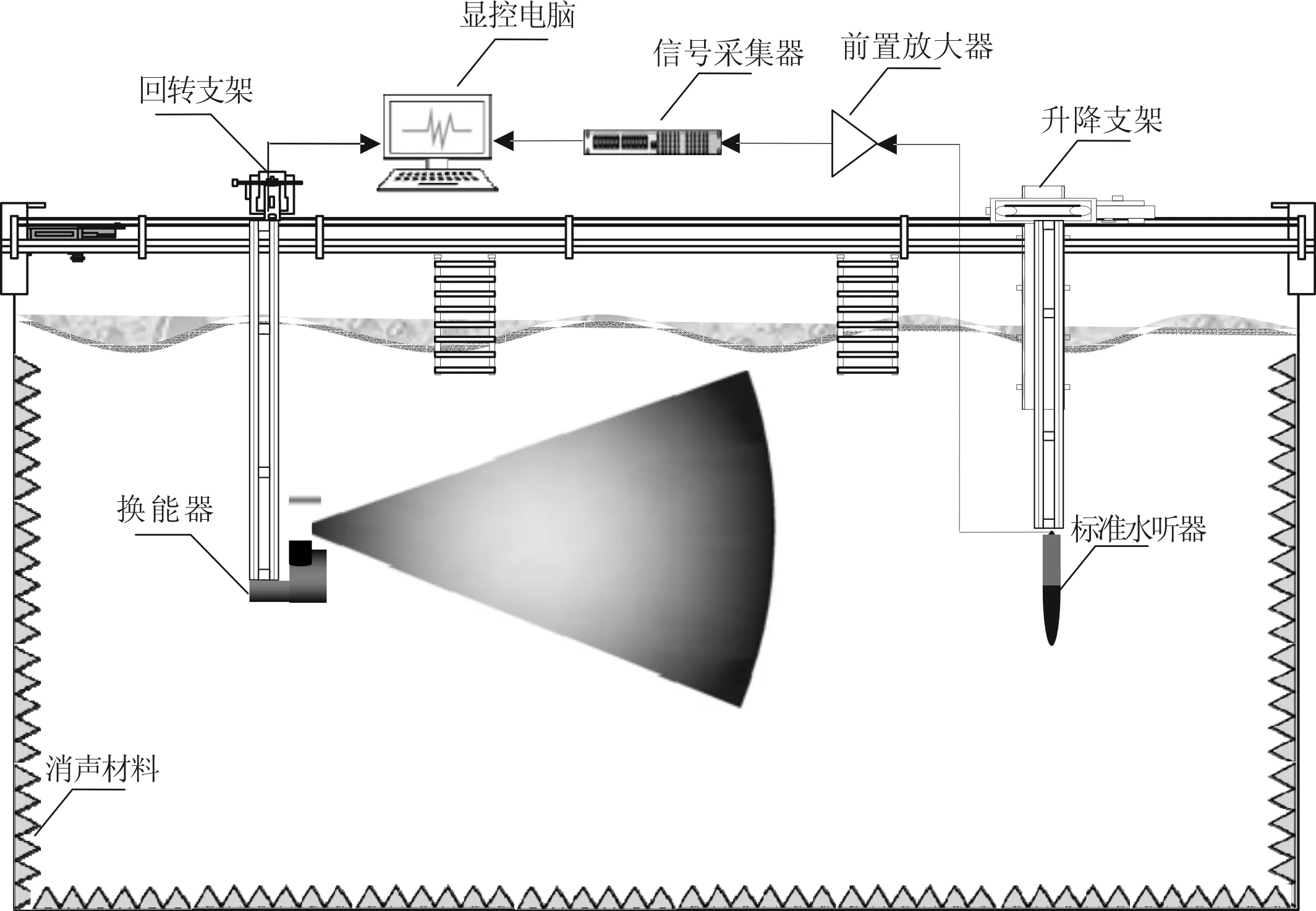
图1 消声水池上多维运行控制装置及其配套设备组成图Fig.1 Diagram of multi-dimensional operation control device and auxiliary equipments on anechoic tank

试验设备技术要求要求依据标准水听器频率范围0.1 MHz~2.5 MHz,扩展不确定度U=0.9 dB(k=2)JJG1017-2007《1 kHz~1 MHz标准水听器》[6]。信号采集器最高采样频率为10 MSa/s,电压测量不确定度1 mV。JJF 1048-1995《数据采集系统校准规范》[7]。倾角仪最大允许误差±0.1°JJF(浙) 1057-2010《数显倾角仪校准规范》[8]。

图2 垂直航迹线方向换能器阵列Fig.2 Transducer array in cross-track direction
2 校准方法
2.1 声源级
水声换能器的声源级是发射换能器的一个重要电声参数。一个声呐换能器声辐射的声源级定义为:在其声轴方向上,距发射器等效声中心1 m远处的表观声压对应的平面行波的声强级,以SL表示,即
SL=20lges+20lgd-20lgMs+120
(1)
式中:es为标准水听器端输出开路电压,V;d为测试距离,m;Ms为标准水听器自由场电压灵敏度,V/Pa。图2为多波束声呐声轴方向示意图。
2.2 工作频率
在一定的海洋因素条件下,海水吸收造成的衰减与频率紧密相关。频率越高,衰减越大,当频率高于10 kHz时,衰减因子对声强的影响变成一个主要因素,因此海洋中的声呐测量技术必须顾及频率的影响[9]。频率测量方法通常分为计数法和测频法。
计数法的基本思想是将一段频率为f0的待测信号加载到数据采集模块的采集通道,寻找出所采集信号中包含的整周期个数N,以及N个周期中包含的数据点个数n,根据采集通道的采样率v,该信号频率的测量值为
(2)
该方法特点是对采样速率要求较高,对波形、振幅等无过高要求,是目前应用较为广泛的数字化信号频率测量方法。直接测频法是根据频率的定义进行测量的一种方法。它是用电子计数器显示单位时间Ts内通过被测信号的周期个数来实现频率测量或者测量一个周期信号的历时T0求倒数来计算频率。这种方法对时间基准的准确度和计数器计数的准确度要求较高。
2.3 波束宽度
波束宽度是指指向性图的主瓣或主波束两侧的两个方向之间的夹角,此两方向上的声压级相对于轴向声压级下降3分贝的声级,就称之为“下降3分贝的波束宽度”,通常记作2θ-3 dB。指向性图其实是一个三维空间图,直观地表示了换能器发射声能在声轴方向上的聚集程度。指向性图一般需要做归一化处理,即将声轴上发送响应值定为0 dB,因此在归一化的指向性图上,声轴方向值最大,其他任意方向均为负分贝值[10]。波束宽度指向性图案可用直角坐标系或者极坐标系表示,直角坐标系分辨力较高,极坐标系则形象直观(图3)。

图3 直角坐标表示指向性图案Fig.3 Directivity pattern in rectangular coordinates
通常,波束宽度校准方法是:将发射换能器与接收水听器处于水下同一深度并满足远场距离,通过水平旋转发射换能器,得到水平面内不同角度所对应的水听器开路电压,绘制换能器水平指向性图案;通过垂直旋转发射换能器,得到垂直面内不同角度所对应的水听器开路电压,绘制垂直指向性图案。多波束声呐具有较宽的水平开角和较窄的垂直波束角。窄波束角校准对校准装置要求较高,假设校准多波束声呐0.5°的波束角,校准装置角度控制的不确定度宜小于被检设备标称值的1/3~1/5,角度控制的机械设计与加工难度较大。相比而言,在机械装置开发中,距离控制准确度要比角度控制高,且二者距离越远,改变距离引起的角度变化分辨力越大。针对这一难题,提出窄波束角的相对校准方法,即保持发射换能器静止,通过升降标准水听器达到二者相对角度位置变化的校准目的。
2.4 脉冲宽度

图4 典型正弦脉冲波形Fig.4 Typical sinusoidal waveform
脉宽影响多波束声呐距离分辨力,是保障水下微地貌测量和小目标探测性能的主要参数,脉冲越窄,分辨力越高。多波束声呐的脉冲宽度在一定范围内是可调的,以适应不同的测量需求与环境。当换能器发射功率一定,窄脉冲的能量受到限制,损失探测距离;采用长脉冲可提高发射能量,达到增加探测距离的目的,但却损失了距离分辨力。以上技术矛盾,促使FM信号、编码脉冲信号等复杂信号技术的引入,提升了多波束声呐的性能。
脉宽校准方法比较简单,通过标准水听器与信号采集器获得脉冲声信号,模数转换之后,截取脉宽内的稳态部分(图4),获得脉冲信号的持续时间,即为实测脉冲宽度,与多波束声呐标称脉宽比较得到校准值。
3 试验与分析
3.1 声学指标试验流程
实验流程描述如下:
(1)待测换能器经转接法兰盘安装到多维运行控制机构的支架底端,使其发射扇面与水面平行,调节声呐设备的工作参数(频率、功率、脉宽、增益、门限等),使其正常、稳定发射脉冲信号。
(2)标准水听器与信号采集器连接。当脉冲信号进入水听器,信号采集器实时记录水听器端的开路电压幅值。
(3)竖直方向测试(图5)。调节水听器至最低端,使待测换能器大致对准水听器方向并发射一定脉宽的声波信号。换能器稳定不动,以△d=1 cm的间隔提升水听器支架,同时记录该点位置处水听器的开路电压值,在移动水听器过程中会出现一个电压峰值,该峰值位置点即为多波束声呐发射波束声轴所在水平面。由测试距离r为8 m可计算,角度变化量为
(3)
(4)水平方向测试(图6)。找到声轴所在水平面后,固定水听器。此时,通过精密回转装置在水平面内转动待测换能器,控制伺服电机以0.1°的角度间隔转动换能器,旋转一周后,每个角度位置处都可采集到水听器端的一个开路电压值,绘出发射指向性图。在转动换能器过程中,找到电压最大值所在位置即为换能器的声轴方向。至此,找到了声轴方向,采集此刻水听器接收到的脉冲信号。
(5)信号经滤波处理后,计算脉冲稳态部分的开路电压有效值,根据标准水听器灵敏度与频率的关系曲线图可查得各个检测频率范围所对应的电压灵敏度。结合标准水听器的电压灵敏度M,便可计算各个位置处的自由场声压。进行声源级、工作频率、波束宽度、脉冲宽度等性能参数的分析与计算。


图5 窄波束角校准原理示意图Fig.5 Calibration schematic diagram of the narrow beam angle图6 宽波束角校准原理示意图Fig.6 Calibration schematic diagram of the wide beam angle
3.2 测试结果分析
表2为iBeam8120多波束声呐水声实验测试结果。该型号多波束工作频率为200 kHz。波束角为1.5°×1.5°,波束扇形最大开角160°。需要说明的是:第一个1.5°是指多波束声呐沿航迹线方向的发射指向性;第二个1.5°是指垂直航迹线方向的接收指向性;160°是指垂直航迹线方向的发射指向性。对于接收指向性的测量,实验采用的方法是:将水听器替换为标准声源或目标小球,控制旋转装置以0.1°的步进值水平方向旋转多波束声呐换能器,多波束声呐接收不同角度位置处标准声源或小钢球的发射或反射信号,采集多波束声呐换能器端的开路电压或通过解析多波束XTF数据可得每个角度处的反向散射强度值 ,据此拟合绘出多波束接收波束角。
图7为多波束声呐垂直航迹线方向的发射指向性图,对于沿航迹线方向的发射指向性,试验进行了扇区-60°,0°,60°三个角度位置处的测试,如图8所示。对于接收指向性,对多波束声呐中央128号波束进行了检测,如图9所示。

表2 多波束声呐声学指标测试数据Tab.2 Acoustic indexes test data of multi-beam sonar


图7 垂直航迹线方向发射指向性图Fig.7 Transmitting directivity pattern in cross-track direction图8 垂直航迹线方向-60°,0°,60°发射指向性图Fig.8 Transmitting directivity pattern at -60°,0°,60° in along-track direction

图9 中央128号波束垂直航迹线方向 的接收指向性图Fig.9 Receiving directivity pattern of No.128 beam in cross-track direction
4 不确定度评定
4.1 频率测量不确定度评定
4.1.1 数学模型
工作频率测量的偏差通过多波束声呐标称的工作频率值减去信号采集与分析系统(标准水听器、信号采集器)测得的频率值,其数学模型如下
δf=fb-fs
(4)
式中:δf为工作频率测量偏差,Hz;fb为多波束声呐标称频率值,Hz;fs为信号采集与分析系统测得的频率值,Hz。
4.1.2 测量不确定度来源
多波束声呐工作频率的测量不确定度的主要来源及数据如表3所示。对多波束声呐在200 kHz 工作频率下,通过标准水听器和信号采集器,连续采集10个脉冲信号,得到测量数据(Hz):199 926,199 932,199 993,199 938,199 917,199 986,199 904,199 925,199 961,199 929。

表3 工作频率测量不确定度分量综合分析表Tab.3 Comprehensive analysis for the components of frequency uncertainty
4.1.3 合成不确定度
根据不确定度的传播率,将上述不确定度分量进行合成,则
(5)
4.1.4 扩展不确定度
取包含因子k=2,则
U=2μc=201 Hz,k=2
(6)
4.2 波束宽度测量不确定度评定
4.2.1 数学模型
波束宽度测量的偏差通过多波束声呐标称的波束宽度减去多波束声呐计量检定装置测得的波束宽度获得,其数学模型如下
δθ=θb-θs
(7)
式中:δθ为波束宽度测量偏差,(°);θb为多波束声呐标称波束宽度,(°);θs为水声计量标准装置测得的波束宽度,(°)。
4.2.2 测量不确定度来源
多波束声呐波束宽度的测量不确定度的主要来源及数据如表4及表5所示。通过精密回转升降机构调节多波束声呐换能器与标准水听器之间的角度位置关系,连续采集多波束声呐沿航迹线方向和垂直航迹线方向各个角度位置处的声压值,取下降3 dB的角度位置点,获得波束宽度。得到测量数据(°)如下
沿航迹线方向:1.19,1.18,1.19,1.19,1.19,1.20,1.18,1.19,1.17,1.20。
垂直航迹线方向:51.32,51.36,51.28,51.29,51.34,51.35,51.31,51.26,51.3,51.33。
4.2.3 合成标准不确定度
根据不确定度的传播率,将上述不确定度分量进行合成,则
(8)
4.2.4 扩展不确定度
取包含因子k=2,则
U=2μc=0.045°
(9)

表4 沿航迹线方向波束宽度测量不确定度分量综合分析表Tab.4 Comprehensive analysis for the components of along-track beam width uncertainty

表5 垂直航迹线方向波束宽度测量不确定度分量综合分析表Tab.5 Comprehensive analysis for the components of cross-track beam width uncertainty
合成标准不确定度为
(10)
扩展不确定度
U=2μc=0.13°
(11)
5 结语
多波束声呐计量校准的核心是用计量标准对测量仪器的计量性能进行评估,以获得仪器量值的溯源性与一致性,以保证其测量的准确可靠。
(1)多波束声呐声学参数计量校准系统依据交通运输部部门计量检定规程JJG(交通)139-2017《多波束测深仪 浅水》的要求而设计,可实现多波束声呐声源级、波束宽度、工作频率和脉冲宽度等参数的计量校准,各校准参数的测量不确定度满足规程要求。
(2)选取国内新型多波束声呐设备进行校准试验,试验结果优于JJG(交通)139-2017《多波束测深仪 浅水》声源级最大允许误差±3.0 dB,扇区开角最大允许误差±10°,波束角最大允许误差±0.25°的要求,验证了本校准系统的可行性。
(3)进一步开发校准系统的自动化功能。完善校准系统中多维运行控制装置的自动化回转、升降和定位功能,改进水声信号自动化同步采集与滤波处理,实现指向性图自动化绘制。
(4)下一步进行校准系统的稳定性和重复性试验,依据JJF1033-2016《计量标准考核规范》,进行计量标准建设。
(5)扩展校准系统的适用范围,可开展侧扫声呐、浅地层剖面仪、ADCP等海洋声呐测量仪器的计量校准工作。
猜你喜欢
电声技术(2022年4期)2022-06-15
电声技术(2022年3期)2022-04-28
声学与电子工程(2021年1期)2021-04-19
合肥工业大学学报(自然科学版)(2020年11期)2020-12-05
作文成功之路·小学版(2020年9期)2020-10-28
物联网技术(2019年9期)2019-11-06
人大建设(2018年11期)2019-01-31
科技视界(2018年9期)2018-07-27
科学与财富(2018年8期)2018-05-09
汽车文摘(2017年9期)2017-12-06
