
低成本MEMS INS/GNSS RTK组合导航在高速列车中的研究
2019-09-16 13:04张海涛
数码世界 2019年7期
张海涛


摘要:为7提高高速列车的导航精度和降低成本,提出了一种低成本mems INS/RTK组合导航系统的设计方案。分析了MEMS INS和GNSS RTK各自的误差源,并建立了组合系统误差模型,进一步设计了MEMS INS/GNSS RTK高速列车组合导航算法。仿真结果表明,该MEMS INS/RTK高速列车组合导航系统具有低成本、精度高,可靠性好等优点,降低了惯性元器件的精度要求,避免了惯性导航系统的误差随时间积累而增加。
关键词:捷联惯性导航系统全球定位系统组合导航卡尔曼滤波高速列车定位误差
随着高速铁路在全球范围内蓬勃发展,高速列车的运行速度已经达到300km/h以上。为了确保高速列车的安全运行,高精度的全球定位系统(GNSS)已经成为列车必不可少的装备。然而,GNSS在高速列车全程行驶过程中,能长时间提供高精度的位置、速度等导航信息。但是,导航信息更新速率慢,也容易受到隧道、山区、森林等地区的遮挡,使GNSS RTK接收机短时间信号丢失,无法给出定位解或定位精度较差。上述问题都将对基于GNSS RTK技术的高速列车安全保障系统造成隐患。捷联惯性导航系统(MEMS INS)是一种自主式导航系统,更新速率快,其工作不需要任何外界信息,仅依靠系统本身就能在全天候条件下、全球范围内进行连续的三维空间定位。但是,其存在着定位误差随时间积累而增长的致命缺点,难以单独完成精度较高的长时间导航任务。可见,MEMS INS和GNSS RTK在性能上恰好具有很强的互补性。将MEMS INS和GNSS RTK两种系统有机结合起来构成高速列车组合导航系统,既可以解决短时间内GNSS RTK卫星信号丢失的问题,又可以避免惯性导航系统的误差(主要是位置误差)随时间积累而增加,从而有效地实现精确、连续、可靠,更新速率快的高速列车导航定位。
1列车组合导航系统的结构设计
MEMS INS是将惯性传感器(陀螺仪和加速度计)按照要求组合成一个硬件整体。它能测量载体的三维加速度和角速度,再配备导航计算机和相应的导航解算软件就可实现导航定位。而GNSS RTK可以直接获取载体的三维位置和三维速度。列车所行驶的铁轨在一定行驶时间内可认为是平坦的,因此,认为列车的天向速度为。对传统的MEMS INS进行简化设计,该高速列车组合
图1 MEMS INS/GNSS RTK列车组合导航系统图
如图l所示,陀螺仪包括三个陀螺,用来测量列车的旋转角速率加速度计包括两个加速度计用来测量列车沿横向和纵向的加速度,经过MEMS INS导航解算,获得列车的即时速度和位置信息Z1;同时,GNSS RTK接收机输出载体的即时速度、位置等信息。
2列车组合导航系统的误差分析
在MEMS INS中,取导航坐标系为东北天()地理坐标系,相对地心地球固连(ECEF)坐标系的惯性测量误差方程如下,
(1) (6)式中,φe、φn、φU分别为东、北、天向的姿态误差角; δVE、δYN、δl、δλ是惯性系统输出速度、位置与GNSSRTK接收机输出速度、位置的差;fE、fN为东向、北向的比力量测值;VE、VN为SINS输出的载体速度信息;L、λ分别是纬度、经度;ωie为地球自转角速度;RN为子午面内的曲率半径,即R= a(l -e2)/(1 - e2 sin2L);RN为子午面垂直的法线平面内的曲率半径,即RN= a/(l-ez sinzL),式中e=(a-b)la表示椭球的偏心率,a、b分别指WGS—84坐标系所规定的长半轴、短半轴;εbE、εbN、εbU分别为东向、北向、天向的陀螺随机漂移分量AAbE、AAbN分别为东向、北向的加速度随机误差分量。
3组合导航Kalman滤波器设计
3.1状态方程
在设计组合导航算法时,采用间接法Kalman滤波,选取导航参数的误差量作为系统状态,将MEMS INS的平台误差角方程、速度误差方程、位置误差方程以及陀螺仪、加速度计误差模型综合起来,可得到列车组合导航系统状态方程为:
3.2系统量测方程
组合导航中,取位置信息和速度信息为系统的观测量。设GNSSRTK和MEMS INS输出的速度信息分别为
式中。VVE.、VNr分别为真实的东向、北向速度值;VgE、VgN分别为GNSS RTK东向、北向速度值;Vik、VN分别为MEMS INS东向、北向速度值;δVgE、δVgN、δVE、δVrN分别为GNSS RTK、MEMS INS东向、北向速度误差。
GNSS RTK和MEMS INS输出的位置信息分别为
式中,λr、L1分别为真实的经纬度;λg、Lg分别为GNSS RTK经、纬度值;λ1、Li分别为MEMS INS经、纬度值;δλg、δLg、δλ、δLg分别为GNSS RTK、MEMS INS的经、纬度误差值。
由式(10)和式(II)可以得到列车组合系统的量测方程为
4仿真结果
假设列车的初始位置为东经107°30′、北纬44°53'56"度,初始东向匀速运动324km/h,北向速度为Om/s。GNSS RTK的输出采样周期及滤波周期Is,陀螺仪一阶高斯Markov相关时间300s,陀螺仪一阶高斯Markov漂移均方差为l°/h;加速度计一階高斯Markov过程相关时也为300s,加速度计一阶高斯Markov过程均方差为10-3g;姿态角φE=φN=300,Uφ=O;8VE= 2m/S,δVN= 2m/s;δλ=δL=50m,陀螺漂移取O.l°/h,加速度计零偏取IO-4g;
GPS接收机位置误差均方差为lOm,GPS接收机速度误差均方差为0.2m/s。
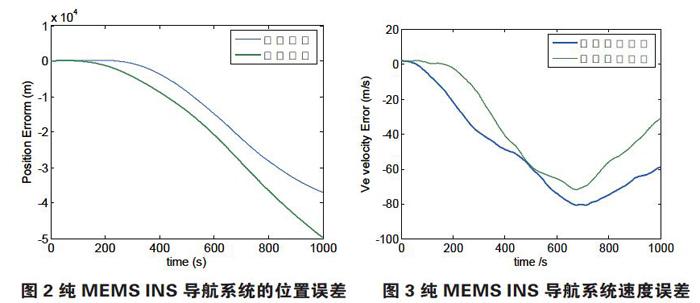
为了充分检验本文所研究的列车组合导航系统的性能,文中对单纯MEMS INS导航、MEMS INS/GNSS RTK组合导航系统分别进行了仿真。单纯MEMS INS导航的部分仿真结果如图(2-3)所示:
根据上图(2-3)可以看出,由于受到惯性器件误差的影响,经过lOOOs的仿真时间,单纯MEMS INS的定位误差呈明的发散趋势。经纬度误差达到了104数量级;东向速度误差已经积累到80.56m/s;北向速度误差积累到71.75m/s。这是由纯惯性系统定位误差随时间积累的固有缺陷所决定的。因此仅依靠单纯的MEMS INS导航是难以完成长时间、精度较高的高速列车导航的。SINS的定位误差则获得了显著的收敛。纬度误差控制在以内;经度误差控制在以内;东向速度误差控制在以内;北向速度误差控制在以内。由此可见,通过将MEMS INS/GNSS RTK组合导航系统,显著地遏制了MEMS INS的輸出误差随时间明显发散的趋势,并有效地提高了系统的导航定位精度和可靠性,已经完全能够满足列车导航定位的要求。
5结论
综上述仿真结果,MEMS INS/GNSS RTK组合导航技术有效地克服了纯MEMS INS导航误差随时间积累的缺陷。在实际工程应用中,当GNSS RTK在短时间内丢失信号时,就可以仅依靠SINS来实现高速列车导航定位;当GNSS RTK信号再次恢复正常时,则继续使用MEMS INS/GNSS RTK组合导航系统进行定位。同时,正确的GNSS RTK信息继续对MEMS INS进行修正,从而MEMS INS就始终保持着较高的定位精度。这样就能够较好地解决当高速列车行驶在隧道、山区、森林等地区时,GNSS RTK接收机短时间内无法定位的问题,实现了高精确、连续、更新速率快,高可靠性的高速列车导航系统。
参考文献
[1] Haitao Zhang, Unscented Kalman filter and its nonlinearapplication for tracking amovlng target, International Journal forLight and Electron Optics (Optik), VoMne 124, Issue 20. October2013,Pages 4468—4471.
[2]Haitao Zhang,The Performance CoInparison and Analvsis ofExtended Kalman Filters for GPS/DR Navigation, InternationalJournal for Light and Electron Optics (Optik) ,Volume 122, Issue 9,Mav 2011,Pages 777-781.
[3]徐晓,GNSS软件接收机的研究与实现,博士学位论文,中国矿业大学(北京),2012年4月.
猜你喜欢
百科探秘·航空航天(2020年5期)2020-05-28
中国电气工程学报(2019年18期)2019-10-21
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
中学生数理化·七年级数学人教版(2016年6期)2016-05-14
海峡科学(2013年3期)2013-10-21
卫星电视与宽带多媒体(2013年1期)2013-04-26
现代电子技术(2009年19期)2010-05-13
数学大世界·小学低年级辅导版(2010年4期)2010-03-25
卫星电视与宽带多媒体(2009年22期)2009-12-11
