
改进PSO-BP方法在ATP车载设备多故障诊断中的应用研究
2019-09-19 06:08
测控技术 2019年2期
(1.兰州交通大学 自动化与电气工程学院,甘肃 兰州 730070; 2.兰州铁路局客运段,甘肃 兰州 730070)
针对列车自动防护(Automatic Train Protection,ATP)车载设备的故障问题,目前大多采用单故障诊断方法,如赵阳[1]等人提出基于文本挖掘的故障诊断方法,故障准确率达到86%;曹哲[2]等人提出基于神经网络与案例推理的诊断方法,诊断正确率达到89%;徐田华[3]等人提出基于贝叶斯网络的车载设备故障诊断系统,故障定位准确率达到89%,其方法并不适用于系统因存在潜在故障引发多故障的诊断,因此需要一种多故障诊断方法。
目前有很多种多故障诊断的方法,如连可[4]等人基于多类支持向量机(SVM)和小波变换提出了一种对模拟电子系统的多故障诊断方法;Kundu[5]等人通过粒子群算法和多故障注入实现多故障诊断;文天柱[6]等人提出一种基于改进ENN2聚类算法的汽轮发电机组的多故障诊断方法。但用于ATP车载设备的多故障诊断方法并不多,根据ATP车载设备的故障特点,结合BP网络的非线性映射能力与PSO算法的全局寻优能力建立改进粒子群优化BP(PSO-BP)网络模型,并将其运用于ATP车载设备的故障诊断。在对ATP车载设备故障进行分析的基础上,提取出9种故障特征,通过改进PSO-BP方法对特征进行分类来映射出复杂的故障类型,检测出ATP车载设备存在的隐蔽故障,提高检测精度和系统的可靠性,因此实现车载设备故障智能化诊断与预测,对提高高速铁路的运营效率具重要意义。
1 ATP车载设备及故障诊断
1.1 ATP车载设备概述
图1所示的CTCS3-300T型ATP车载设备[7-8]的结构非常复杂,主要包括ATPCU(C3控车时实现超速防护的核心模块)、SDP(列车运行速度和走行距离处理单元,同时还是Profibus总线控制器)、C2CU(C2控车的核心模块)、BTM(ATP系统的应答器天线接口)、PG(速度传感器)、D(多普勒雷达)、DX/DI(开关量输入/输出接口)、SDU(从速度传感器和多普勒雷达中读取脉冲)、DMI(人机界面)、TCR(编码轨道电路的信息读取器)、CAU(应答器天线装置)、TSG(列车信号网关)、JRU(司法记录装置)、GCD(加密装置)、STU-V(安全传输单元)、GSM-R(ATP与GSM-R的接口设备)、VDX(安全开关量输入/输出接口)、PUC(编码轨道电路接收线圈)、MVB(信号装置)、Local MVB(车辆MVB)等设备。
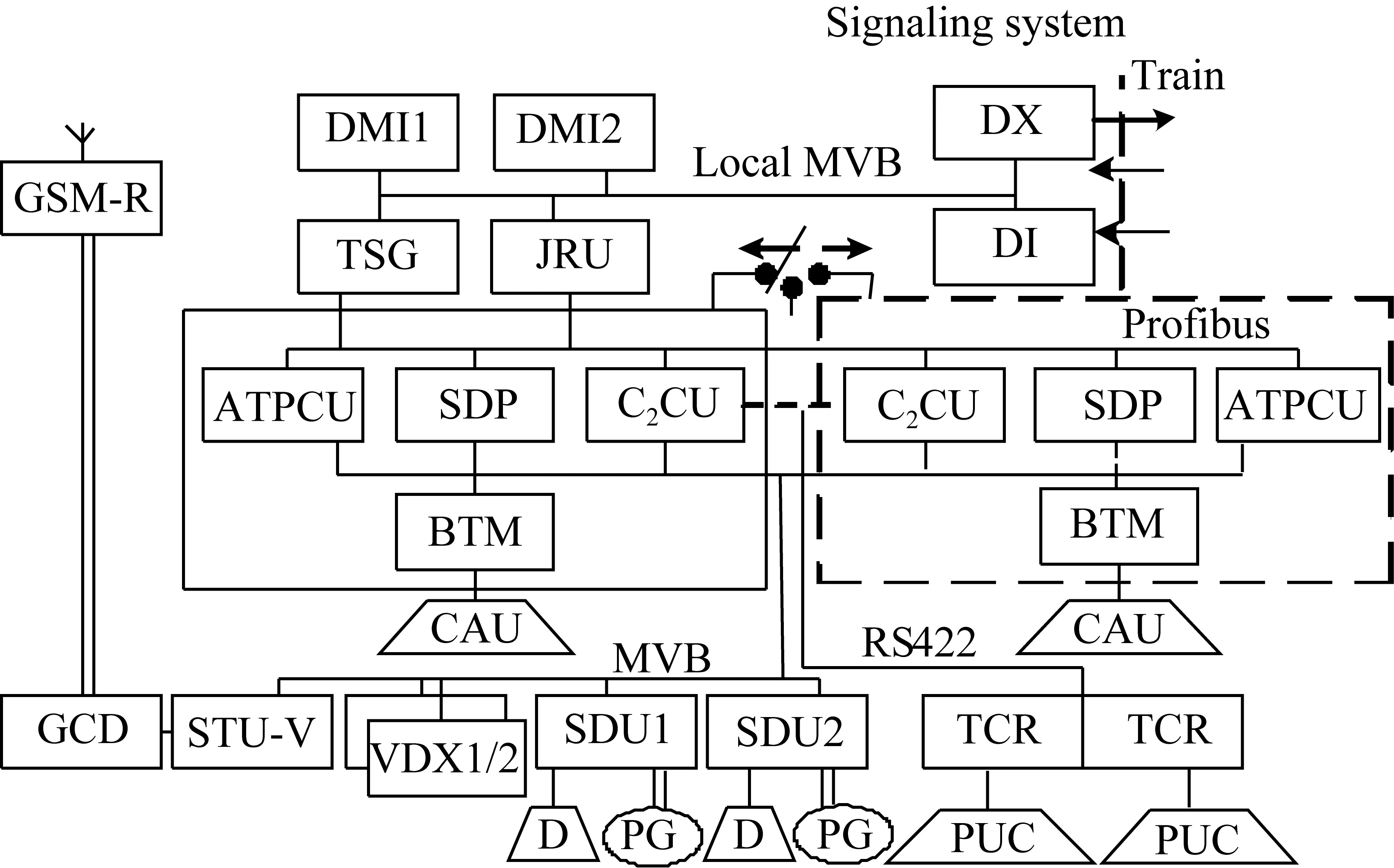
图1 CTCS3-300T型ATP车载设备的结构
1.2 ATP车载设备故障分析及特征提取
根据文献[9]和文献[10]分析ATP车载设备在高速列车运行中遇到的不同故障,产生故障的原因如表1所示。
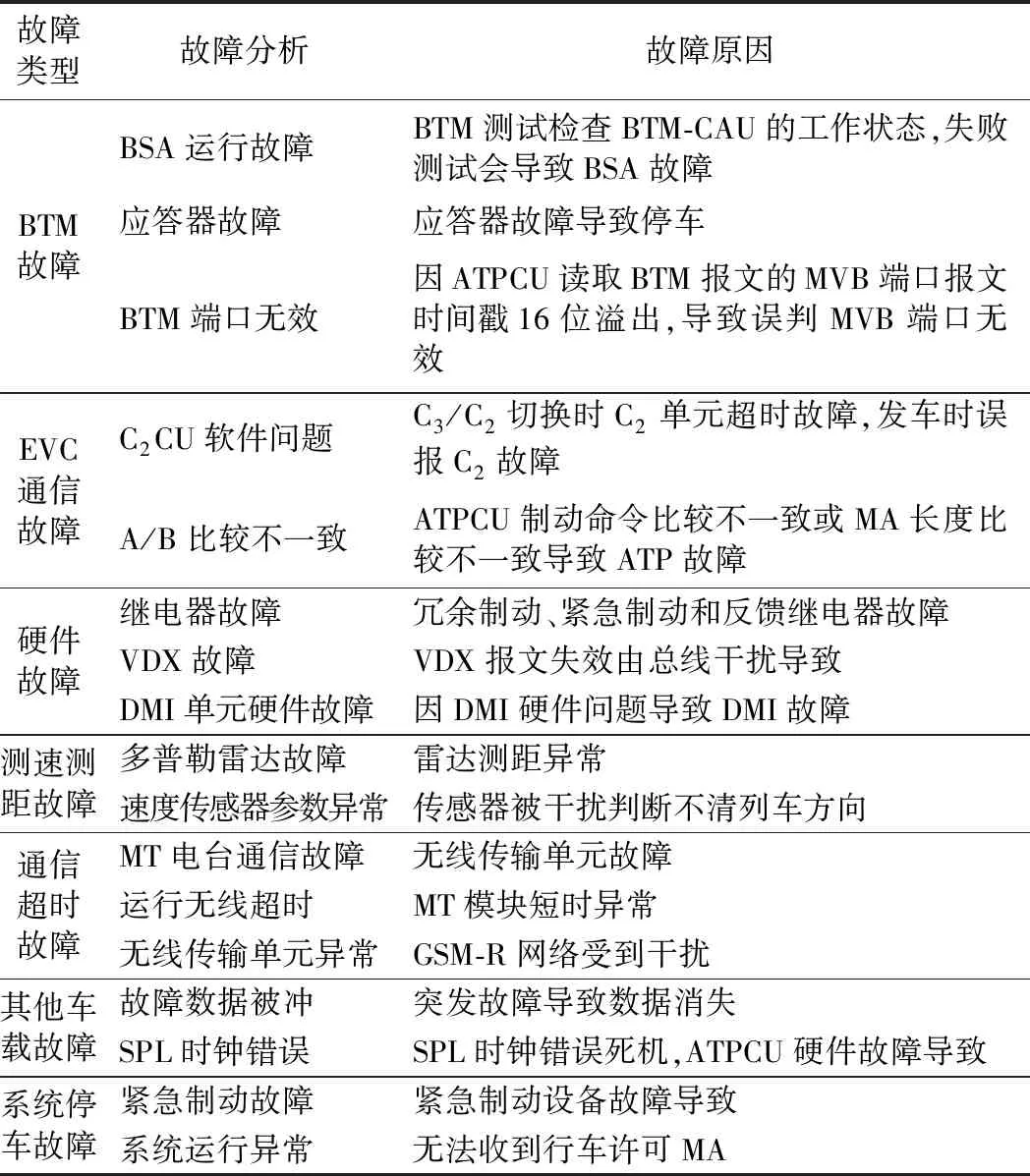
表1 CTCS3-300T型ATP车载设备故障与分析
由表1可知,ATP车载设备存在7种故障类型,经过分析发现,其中的任意一种故障都由多个故障特征体现,同一特征亦可能反映不同的故障类别。根据ATP车载设备的原理及故障特点,可以提取9种特征分别为:无法收到MA、BTM端口报文戳溢出、A/B命令比较不一致、C3切换C2超时、VDX报文故障、继电器故障、速度传感器参数异常、GSM-R网络干扰和MT电台异常,ATP车载设备存在多故障现象。将ATP车载设备看作一个黑匣子,通过找出故障特征与故障类型之间的关系来构建基于改进PSO-BP网络的ATP车载设备的多故障诊断模型。
2 构建ATP车载设备的诊断模型
2.1 BP神经网络
BP神经网络具有非线性映射能力,是一种按信息正向传播、误差逆向传播[11]进行网络训练的多层前馈神经网络,对多模式、多故障的诊断具有优越性[12-14]。网络在信息正向传播过程中所采用的神经元传递函数如式(1)所示,隐层与输出层的输出分别为
(1)
(2)
(3)
式中,e为常数;f1、f2分别为隐含层、输出层激活函数;dij为输入层i和隐含层j之间的权值;hjk为隐含层j和输出层k之间的权值;Fi为网络的输入;θ、θ′为网络阈值;N为隐层神经元个数。
网络在误差反向传播过程中的输出层和隐含层权值调整方式分别如式(4)、式(5)所示,使得网络误差E小于设定的允许值(如式(6)所示),从而得到各个神经元的权值和阈值。
(4)
(5)
(6)
通过BP网络的非线性映射能力隔离ATP车载设备的多故障的过程中,易陷入局部最优解,不能得到最优的故障类型,因此提出用PSO算法的全局寻优能力弥补BP算法的缺陷,扩大搜索范围以尽快找到ATP车载设备的故障。
2.2 PSO算法基本原理
粒子群(Particle Swarm Optimization,PSO)算法是一种随机寻优算法。它将每个诊断问题的解设想成存在于d维空间中的粒子,粒子在搜索空间中飞行的速度如式(7)所示,通过个体和群体的飞行经验来动态调整其速度,并不断更新位置(如(8)所示),直到达到最优为止。每个粒子依据适应度函数值更新如式(9)所示。
(7)
(8)
fitness=min(f(v,x))
(9)

在粒子更新过程中,权重w、粒子跟踪自己历史最优值的权重系数c1、粒子跟踪群体最优值的权重系数c2等参数的设置分别如式(10)~式(12)所示。
w=wmax-(wmax-wmin)×(t/T)
(10)
c1=cmax-(cmax-cmin)×(t/T)
(11)
c2=cmin+(cmax-cmin)×(t/T)
(12)
式中,wmax=0.9,wmin=0.3,cmax=2,cmin=0.6,T为最大迭代次数。
2.3 改进PSO-BP网络模型
通过PSO和BP两种算法优势结合进行ATP车载设备的多故障诊断时,要先确定网络结构,即模型的输入层、输出层及隐含层的节点数,节点数即模型结构层数。将ATP车载设备的9种故障特征表示为F1~F9,7种故障类型表示为G1~G7,并根据BP网络模型的原理,将F1~F9作为输入层,G1~G7作为输出层,Y1~YN作为隐含层,构建基于改进PSO-BP网络的多故障诊断模型如图2所示。在模型的构建过程中,影响着网络诊断性能[15]的隐含层神经元个数N可以通过多次训练网络比较神经元的平均误差大小来确定。
在图2中,系统的输入向量为F=(F1,F2,…,F9)T,隐含层输出向量为Y=(Y1,Y2,…,YN)T,输出层输出向量为G=(G1,G2,…,G7)T,输入层i和隐含层j之间的权值为dij=(d1,d2,…,dN)T,隐含层j和输出层k之间的权值为hjk=(h1,h2,…,h7)T。
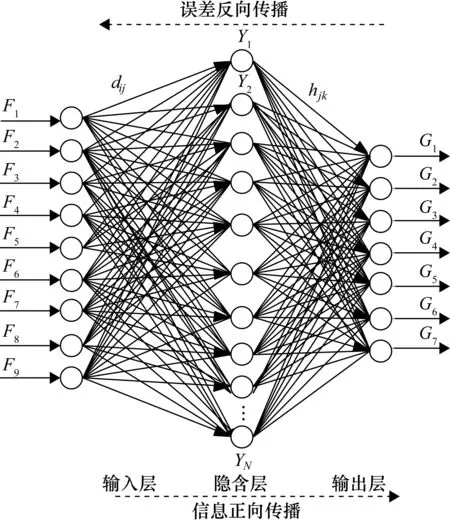
图2 ATP车载设备的PSO-BP网络拓扑结构
在结合PSO算法和BP算法两者优势的过程中,需要将BP网络的权值当作一个粒子,并在粒子搜索过程中,根据ATP车载设备的故障特点及PSO算法与BP算法之间的对应关系,依据由式(6)与式(9)结合而成的式(13)所示的适应度函数,利用式(7)优化速度,并运用式(8)调整粒子的位置,通过不断调整惯性权重w(如式(10)所示)、个体权重系数c1(如式(11)所示)、群体权重系数c2(如式(12)所示)来不断改变权值,使误差达到全局最小值,将网络均方误差作为粒子的适应度函数fitness来评价粒子的好坏,由此可见粒子的适应度值越小越好。
Impacts of cloud-radiative forcing on tropical cyclone intensification and structure
(13)
3 仿真及结果分析
应用Matlab软件工具,检验改进PSO-BP网络模型对CTCS3-300T型ATP车载设备进行多故障诊断的有效性。并结合故障特征选取100组数据用于网络的训练,60组数据作为测试数据测试网络的拟合性能,从而建立160个训练样本用于ATP车载设备的多故障。取20个粒子进行200次迭代,惯性权重为w,取值如式(10)所示,学习因子c1和c2的调整分别如式(11)与式(12)所示,由BP网络与PSO算法的对应关系可知,粒子维数D=L×N+N×M+N+M,训练目标设为0.001,学习速率为0.01~0.1。
网络训练时,将PSO算法优化好的权值赋给已经构建好的网络模型,G1~G7对应的目标输出用二进制编码分别表示为:G1(1000000)、G2(0100000)、G3(0010000)、G4(0001000)、G5(0000100)、G6(0000010)、G7(0000001)。当网络误差小于目标误差时训练停止。将改进PSO-BP网络与BP网络、PSO-BP网络的均方误差曲线进行对比,如图3所示。
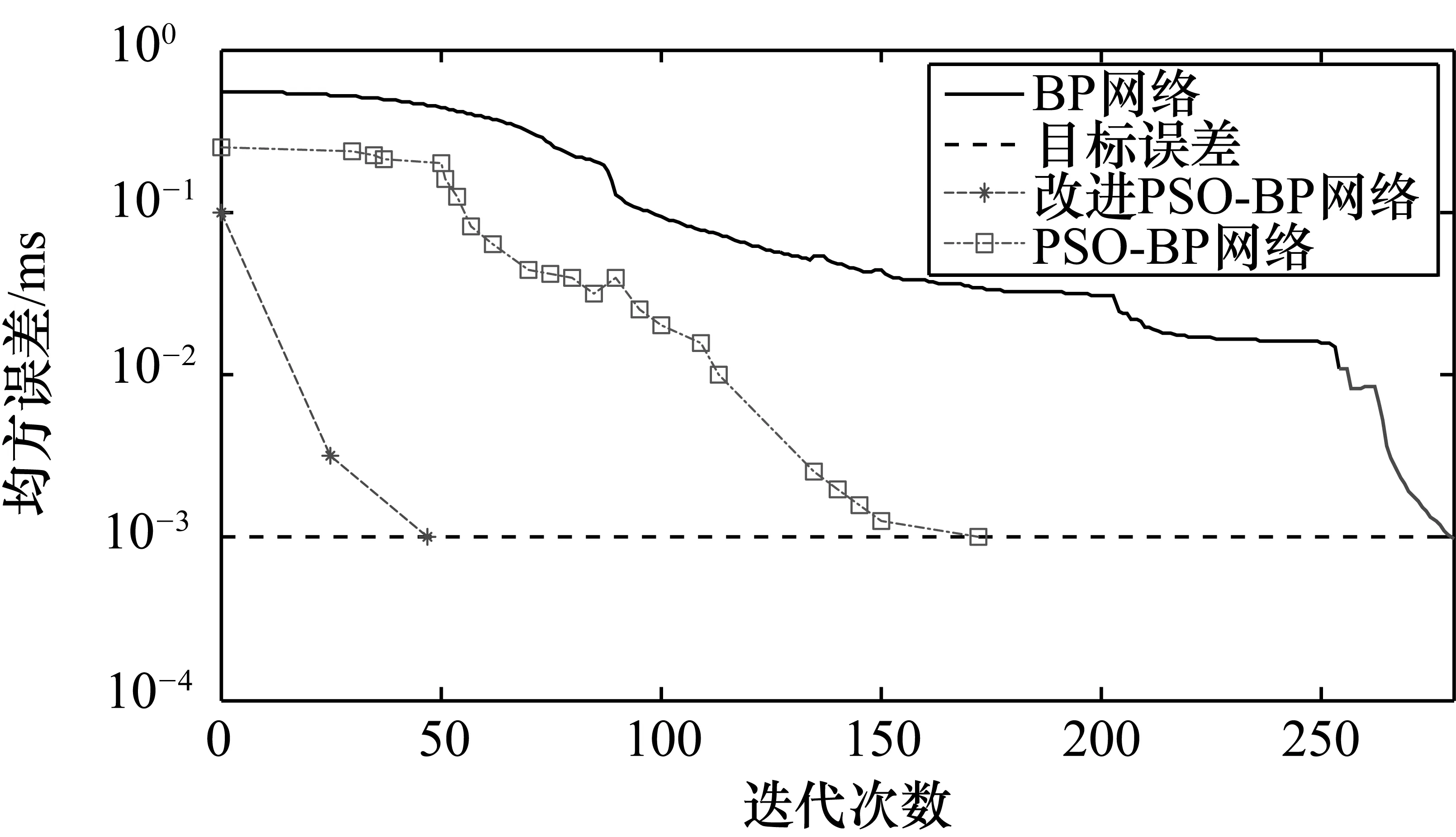
图3 3种网络训练过程中均方误差变化情况
由图3可知,BP网络经过280步的迭代才达到0.001的训练目标,网络的训练效率不高;PSO-BP网络经过172步才达到目标误差,效率依然不高;而在迭代次数和速度上,改进PSO-BP网络都优于BP网络和PSO-BP网络,其在迭代过程中,误差变化明显,仅经过47次迭代就达到了0.001的目标误差,收敛速度得到很大的提高。此时,隐含层N=15、学习速率lr=0.05、c1=c2=1.4945、w=0.6。
图4为PSO-BP网络和改进PSO-BP网络在训练过程中调整权值得到适应度值的变化趋势。
由图4可知,两种网络的适应度值基本上一直在减小,粒子一直在搜索。提出的改进PSO-BP网络的权值在迭代了26次后就得到了全局寻优,优化后的适应度值约为0.0016,此时已经达到全局最优;尽管PSO-BP网络起始的适应度值小于改进PSO-BP网络,但其在接近63次时,才收敛到最佳,其适应度值约为0.0023。通过计算可知,改进PSO-BP网络适应度值低于PSO-BP网络适应度值的30.4%,寻优速度较快。由此可知,在收敛速度方面,改进PSO-BP算法比PSO-BP算法和BP算法都有着较大的提高。
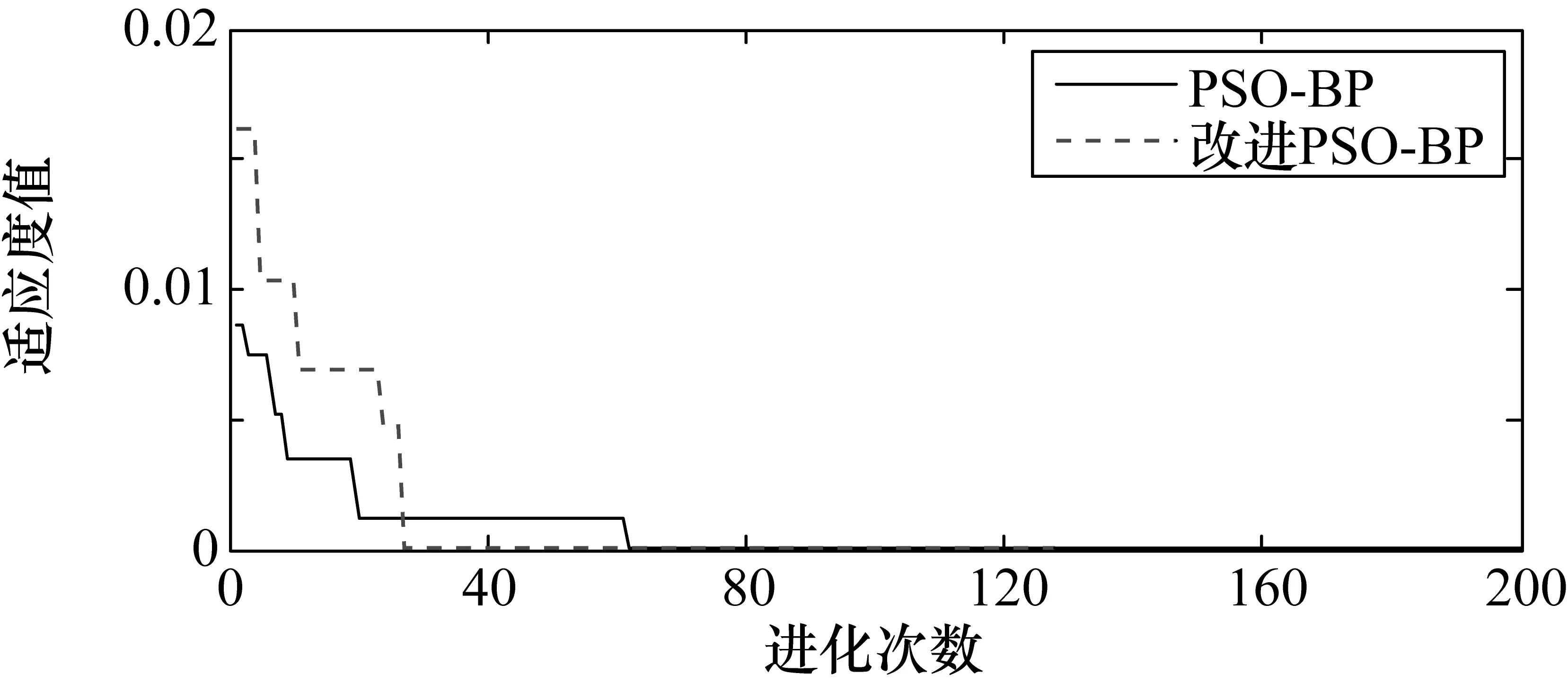
图4 适应度值变化趋势
在3种网络训练结束后,分别输入ATP车载设备进行多故障诊断的测试数据进行仿真验证。对于G=[G1,G2,G3,G4,G5,G6,G7]所示的实际神经网络输出,由于网络的实际输出并不一定与前文G1~G7对应的目标输出完全一致,因此需要对该输出结果进行如式(14)所示的处理,利用式(14)将输出向量G中各元素映射至[0,1]区间,得到归一化输出向量,最终实现对故障的识别。
gEs=(gs-min(G))/(max(G)-min(G)),s=1,2,…,7
(14)
表2中,G1~G7同前文表示测试样本所属故障类型,F1~F7表示测试样本编号。由表2可见,BP网络和PSO-BP网络分别在编号F1、F4、F5与编号F7处出现了无效分类数据,该数据已由下划线标记,其他数据分类有效,诊断结果正确;改进PSO-BP网络所有的输出均为有效,尤其在诊断G5(通信超时故障)、G6(其他车载故障)与G7(系统停车故障)时,其实际输出值明显比PSO-BP网络和BP网络输出值更稳定,更接近于期望输出值,精度更高。同时,改进PSO-BP方法在识别G5时,样本F2的输出值为0.9474,而样本F5的输出值为0.9801,相比于F2更接近于1,按照定义的规则及诊断方法,系统发生故障时很有可能先识别出G5,与期望输出一致,而G2则为G5的潜在故障。因此,该方法相较于PSO-BP网络和BP网络可以更好地识别出系统存在的潜在故障,说明本文方法可以更好地识别出ATP车载设备存在的多故障。
为进一步验证改进PSO-BP方法诊断ATP车载设备的多故障的可行性,在ATP车载设备故障诊断实例中,取与文献[2]相同的故障特征F1~F9的诊断数据,用于本文改进PSO-BP算法中,并与文献[2]进行对比,结果如表3所示。
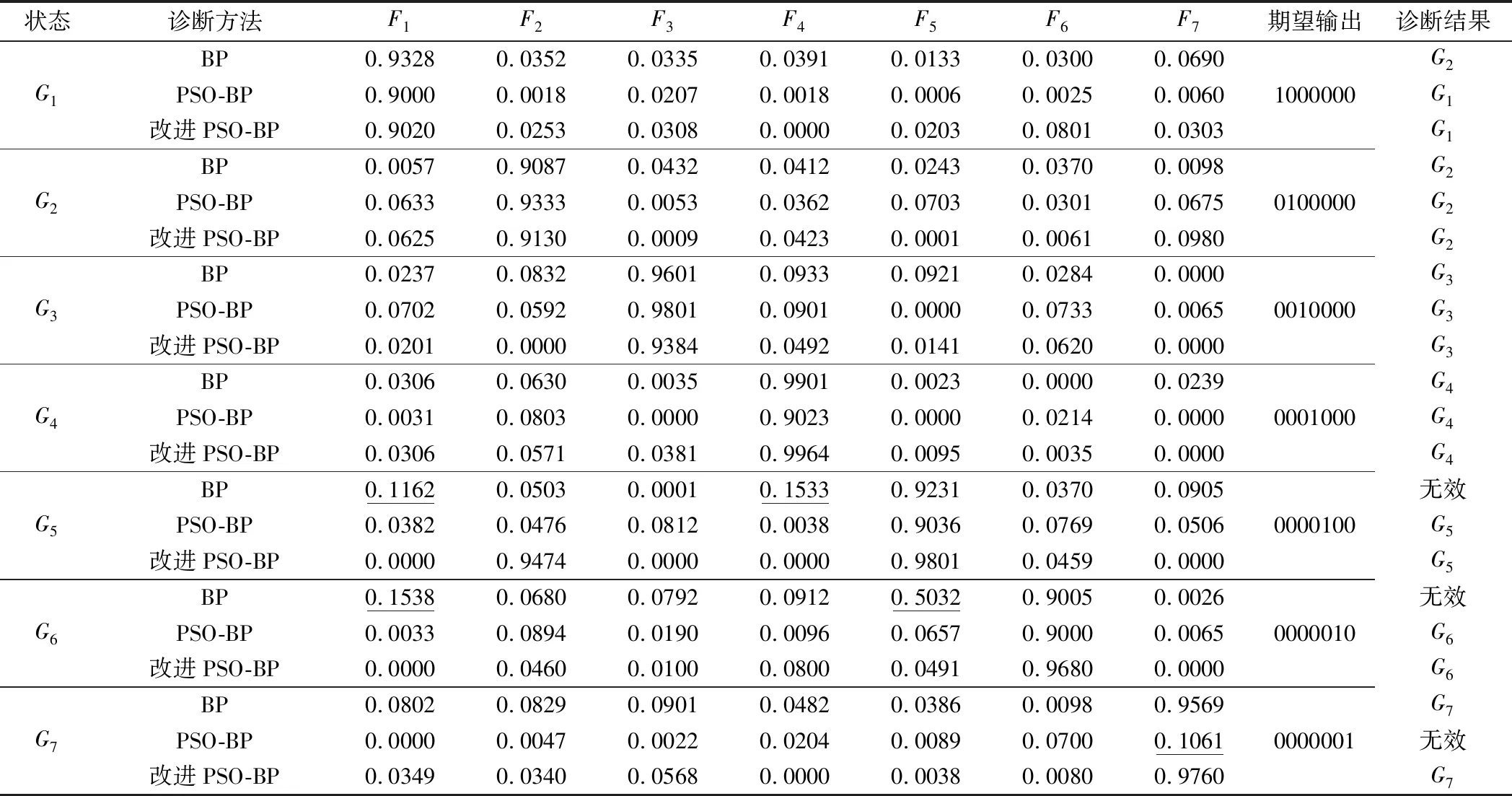
表2 网络输出及诊断结果
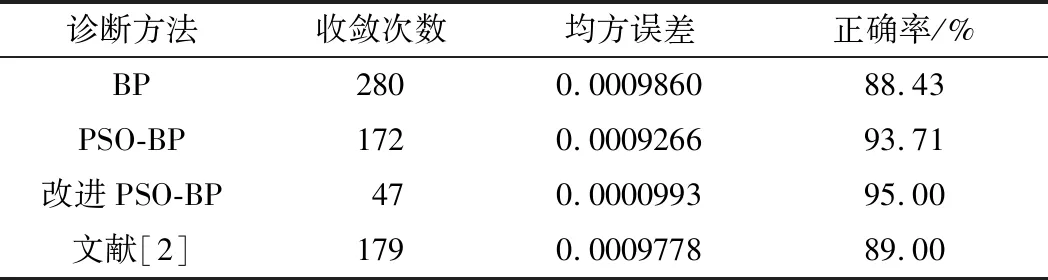
表3 诊断效果对比
由表3可看出,改进PSO-BP网络的误差相比于PSO-BP网络、BP网络及文献[2]中的案例推理与神经网络方法三者的误差都有所下降,迭代次数减少,收敛速度加快,而且对ATP车载设备多故障诊断的正确率相比于文献[2]中单故障诊断方法的正确率稍高。
结合表2、表3可知,本文方法在诊断单故障的同时,也诊断出了系统存在的潜在故障,为ATP车载设备的多故障定位和诊断提供了新途径。
4 结论
① 在ATP车载设备的多故障诊断中引入改进PSO-BP网络并以ATP车载设备的故障特征数据作为网络输入进行训练。以0.001的目标误差分别对BP网络、PSO-BP网络和改进PSO-BP网络进行训练,并比较3种不同网络的训练效果,可以看出所提出的改进PSO-BP网络的目标误差仅迭代47次就已经达到最优,相比于BP网络和PSO-BP网络,其网络输出精度高,收敛速度快。
② 从表2和表3可以看出,改进PSO-BP网络的输出值更稳定,更接近于期望输出值,利用此方法进行ATP车载设备的多故障诊断时正确率达到95%,结果表明改进PSO-BP模型能够很好地拟合ATP车载设备的故障特征与故障类型之间的非线性映射关系,具有更高的可靠性和准确性。
猜你喜欢
计算机仿真(2022年8期)2022-09-28
成都信息工程大学学报(2022年3期)2022-07-21
汽车实用技术(2022年10期)2022-06-09
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01
铁道通信信号(2020年8期)2020-02-06
汽车维修与保养(2019年3期)2019-06-19
江苏通信(2018年4期)2018-12-04
郑州大学学报(工学版)(2018年2期)2018-04-13
自动化学报(2017年7期)2017-04-18
中国公共安全(2017年11期)2017-02-06
