
无人机飞行操纵品质评价准则之探讨
2019-09-24 02:00刘成肖
电脑知识与技术 2019年19期
刘成肖


摘要:近年来,无人机技术迅速发展,相比之下,无人机飞行品质的研究却相对滞后。尤其是对无人机操纵品质的评估,目前为止并没有较为成熟的准则。本文试图从纵向、横向两个角度分析有人飞机飞行品质評估准则对于无人机飞行操纵品质评估的适用性,对无人机飞行操纵品质的评价准则进行探讨,并加以分析,以期对无人机飞行操纵品质评估提供借鉴。
关键词:无人机;操纵品质;评定准则;适用性
中图分类号:TP311 文献标识码:A
文章编号:1009-3044(2019)19-0247-03
开放科学(资源服务)标识码(OSID):
在无人机迅速发展的背景下,其构型、飞控、算法等技术逐渐成熟,但与无人机的“硬要求”飞速发展形成鲜明对比的是无人机飞行质量的研究工作滞后。有观点认为由于目前无人机偏向于其实用性与操作性,且无人机主要是依靠飞控系统自主或者自动执行任务,飞行员仅扮演监控角色(必要时干预),并未直接参与飞机的控制,因此不存在飞行品质的问题。但是无人机作为一种特殊的飞行器,仍具备了飞行器的基本特征,飞行安全、完成任务质量的评估等问题均属于飞行品质研究的范畴。
无人机飞行品质规范是设计飞机,包括飞行控制系统的依据和基础之一。[1]良好的飞行品质规范能够使无人机的设计和制造事半功倍。然而,与无人机技术发展的热潮相比,其飞行品质方面研究相对较少。本文从发展相对成熟的有人飞机飞行品质评估准则作为出发点,就其是否适合在无人机上应用开展了些许探讨和分析。
1 无人机飞行操纵品质
飞行品质是衡量飞机完成特定飞行任务的精确度及驾驶员工作负荷的尺度,对于无人机而言,一种是自主式作业,另一种是遥控式作业。就这两种形式的无人机而言,研究“驾驶员工作负荷尺度”意义不大,但是飞行任务的精确性对于无人机而言却有着重大意义,对于遥控式无人机,在人为操纵的状态下进行作业,就其操纵品质是否符合任务要求,需要一定的评价准则和标准进行评估,这也充分说明了研究无人机飞行品质中操纵品质的重要性。
从主观评估角度而言,有人机使用的评价尺度是Cooper和Harper制定的C-H评价尺度[10],并划分为10个等级,但其都是围绕驾驶员来进行评定的,根据无人机的特点修改,可适用于无人机,具体如表1所示。
无人机即利用飞控系统实现自主飞行,即通过飞行控制装置控制无人机按设定好的航迹飞行,并保证姿态的稳定,其通过传感器、陀螺仪等感受无人机机的航迹、姿态等信息,驾驶员(操纵员)不直接参与飞机的操纵; 而有人机则是通过驾驶员来控制。驾驶员安全舒适地驾驶飞机,且能在整个飞行包线内较好的完成飞行任务时所呈现的特性,称为飞机的飞行品质[2],这就导致了其构成的人——机闭环系统的重心是驾驶员,故而有人机的飞行品质评定准则不能照搬到无人机上进行应用。下面从纵向和横向两个方面,通过对有人机飞行品质评估准则的分析,探讨在无人机上应用的可行性。
2 飞行操纵品质的评价原理与方法
2.1 飞行操纵品质原理
无人机的诞生可追溯到20世纪初,初衷是军用,但在21世纪得到了迅速发展与推广,尤其近年来在我国,无人机早已“飞入寻常百姓家”,在其迅速发展的背后,监管、规范的缺失与不足日益显现,为确保飞机能安全、高效的飞行,故而在飞机的操纵系统、试飞过程中必须遵循相关权威部门颁发的规定性文件,这就是飞机飞行品质规范。就有人机而言,通过大量的飞行经验总结,制定出一套对飞机飞行品质评估的准则和要求,并以此来衡量大多数飞机的飞行品质,具有普遍性和共性[3]。在航空发达的国家(如英、美等)都投入了大量的人力、物力、财力进行飞行品质的研究,最具成效的当属美国,其先后颁布了 AAF- C-1815、 USAF-1815- B、 MIL- STD-1797等规范飞机的飞行品质规范, 鉴此为世界各国参考、引用。
满意的 极好,很理想 在存在一定程度干扰或者天气情况不十分理想时,系统均能得到期望的性能 1级 优,好用 存在一定程度干扰,系统可以得到期望性能 2级 良,但抗干扰能力较弱 存在一定程度扰动时,系统勉强能得到期望的性能 3级 不满意的 有些不好 无扰动、外界调节良好时,系统可以得到期望性能, 4级 比较不好 无扰动、外界条件良好时,系统也能得到适度的性能 5级 非常不好,但可以容忍 无扰动时,系统勉强可以得到适度的性能 6级 不可接受的 勉勉强强执行任务 存在一定程度扰动时,勉强可执行任务 7级 无人机不可操纵 有严重缺陷 无法完成飞行任务 8级 ]
2.2 低阶等效方法
所谓低阶等效系统[4]是指,高阶增稳系统的低阶等效系统在相同的初始条件下且外界刺激一样,在相当频域内或时间段内,在对应指标下输出量的差值最小,则称此低阶系统是高阶系统的低阶等效系统[5]。MIL- STD-1797中规定,在进行等效拟配时,要求对俯仰角速率和法向过载同时开展拟配,将驾驶员对杆的操作情况作为输入量。
低阶等效系统的失配边界是驾驶员对不能察觉到的最大额外动态响应的异差反应,若将其方法应用到无人机系统中,失配边界则需要根据无人机的系统转角频率、指令响应等特性进行重新定义,此时,有人机该系统的低阶等效传递函数[10]也不再适用,此方法也就失去了意义,故此方法不建议运用到无人机飞行品质的评估。
3 无人机飞行品质的评定准则初探
3.1 纵向飞行品质
3.1.1 CAP准则
CAP(Control Anticipation parameter )——操纵期望参数定义为:
[CAP=?δzt=0(Δny/δz)t=∞=?0Δnyss(1s2g)=MFS·FNyZ (1)]
即飞机初始的俯仰角加速度与稳态过载之间的比值,操纵期望参数CAP等于单位杆力所产生的初始俯仰角加速度[MFS](即杆力灵敏度)与稳态机动飞行时,产生单位过载所需杆力[FNYZ](即单位过载杆力)之积[6]。由此可见,操纵期望参数与驾驶员操纵感觉有着密切联系。
由于飞行员在空中对俯仰加速度十分敏感 ,当飞行员感受到飞机过载变化时,通过控制飞行轨迹进行调整,这就要求飞机过载与俯仰姿态加速度之间的动态必须在人体感受能力之内。
由于CAP准则要求飞行员在空中对飞机运动的感知,且与杆力灵敏度[MFS]、单位过载所需杆力[FNYZ]密切相关,而无人机系统并不存在这两者,而是依靠传感器、陀螺仪等进行姿态感知,若要将该准则运用到无人机系统,本文建议在无人机系统设计阶段就将CAP准则考虑在内,优化传感器及飞控程序,进而可按照CAP准则来评定其飞行品质。
3.1.2 带宽准则
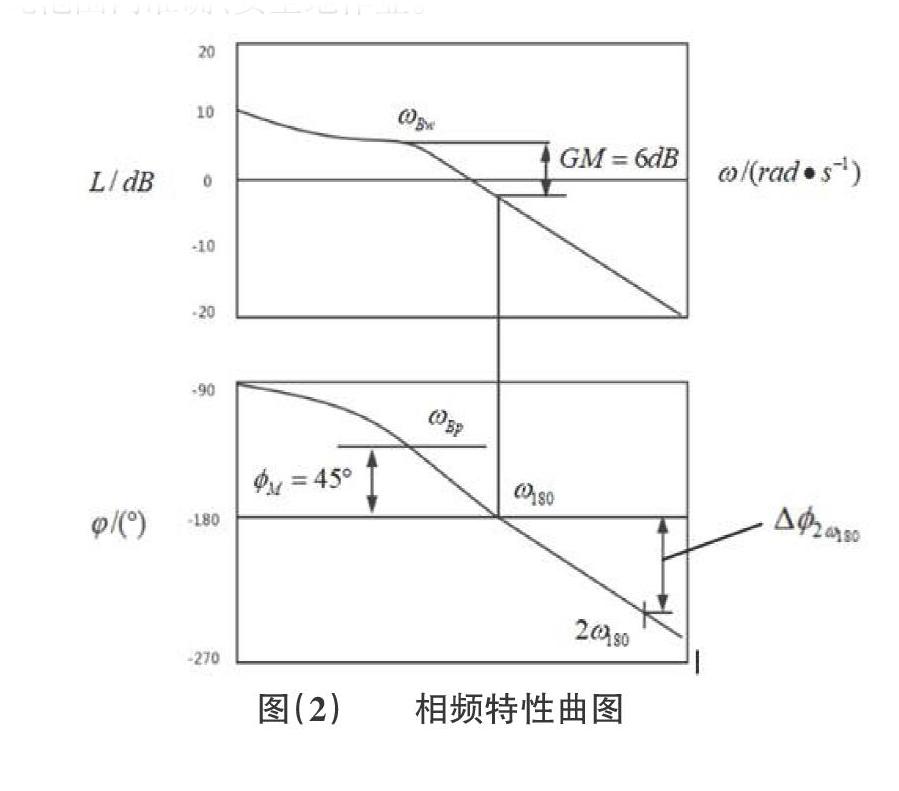
带宽准则是由规定的开环系统带宽及时间延迟[τp]的相互关系定义的[6]。它是俯仰姿态对驾驶员操纵力(对应力操纵系统)或操纵位移(对应位移操纵系统)的开环频响中,相位裕度等于大于45°或增益裕度等于大于6dB所对应频率中的较小者[7]。时间延迟[τp]由下式定义:
[τp=-(φ2ω180+180?)/(57.3×2ω180) (2)]
式中,[ω180]是相位等于-180°时的频率;[φ2ω180]时2倍[ω180]频率处的相角。
依据上述定义,首先从相频特性曲图(图2)线上确定等于-180的频率[ω180],然后找到相位裕度为45°,即相角等于-135时的时的频率[ω135],该频率即定义为相频频宽[ωBP],然后找到[ω180]所对应的幅值,在此基础上增加6dB,从而求得幅值宽[ωBw],带宽即为[ωBP]与[ωBw]中较小者。其次,从图中求得[2ω180]时的相角[φ2ω180],并利用[τp]的计算公式求得延迟时间[τp],依据求得的带宽及[τp]即可判断系统的飞行品质等级,如图3所示。
采用这种标准的好处是,它的适应能力比较强,它可以直接用于具有非常规模飞机的飞行品质评定,由于此准则不是基于人-机的闭环系统,且适用性较好,故而带宽准则可以适用于无人机飞行品质评定。但也并非可以照搬,還需寻找无人机-传感器系统的边界,也就是最大带宽,以保证无人机系统可以在此范围内准确、安全地作业。
3.2 横向飞行品质
无人机的横向运动也存在一定稳定性和操纵性问题,是对无人机绕纵向对称平面内两个正交轴的转动[7],以及沿纵向对称平面垂直轴移动的研究。由于相应的气动力及气动力距变化复杂,所以对无人机横向飞行品质准则的探讨较纵向而言相对复杂些。
在STD-F-1797规范中,飞行品质分为滚转轴的飞行品质和航向轴的飞行品质[8],下面以STD-F-1797中的评价准则为例,探讨其在无人机上的适用性。
3.2.1 滚转轴的飞行品质评价准则
对滚转轴飞行品质的要求包含多个方面,其中最重要的动态特性要求是滚转操纵时的滚转响应,由滚转模态时间常数[TR]、螺旋模态的稳定性、滚转-螺旋耦合震荡、其他要求等决定。
等效滚转模态时间常数[TR]是用来描述飞机的滚转阻尼特性,数据表明,驾驶员的评分是滚转阻尼函数,滚转阻尼就可用一阶滚转模态时间常数[TR]来表示[9]。所以,根据飞机类型、不同飞行阶段给出了滚转时间常数最大建议值,而后根据驾驶员评分与[TR]之间的关系进行评价。螺旋模态是在滚转受外界干扰时,飞机产生的航向的变化及缓慢的滚转,利用螺旋模态的时间常数[TS]及等效系统来评定。
3.2.2 航向轴的飞行品质评价准则
航向方面的飞行品质要求,主要有航向动态相应、航向轴对滚转操作的相应等。飞机对航向输入所产生的滚转震荡响应特性与航向,主要用荷兰滚模态的阻尼比[ξd]及自然频率[ωd]以及[ξd·ωd]的乘积来表示。在进行滚转操作时需要留有足够的航向裕度来进行所需的进入、退出协调转弯。起码对于飞行操纵员来说是可操作的,换言之,即在飞机进行滚转操纵时,以侧滑角作为参考其数值即为可操纵裕度的度量, 或者直接规定协调转弯时脚蹬的需求量。
综上两个轴的飞行品质都与飞行员的主观评定、横杆和脚蹬输入量密切相关,且评价参数也不适用无人机,由于无人机的横向状态量包含滚转速率、偏航速率、侧滑角、滚转角,利用这些状态量建立无人机横向动力学特征方程,故而飞机横向飞行品质评价准则可在无人机上运用的方面较少,而无人机横向具体评价准则还需进一步研究和探讨。
4 结束语
随着无人机产业的兴起,无人机的发展日益迅速,在其迅速发展的背景下,对无人机飞行品质的研究相对落后,至今仍没有一套完整的针对无人机的飞行品质评估准则,因此对无人机飞行品质的研究愈发重要。本文依据飞机飞行品质评估准则,探讨其在无人机上运用的实用性与可行性并给出使用建议,对无人机飞行品质评估准则的研究有一定参考意义。
参考文献:
[1]戴宁,杨晖.无人机飞行品质规范浅析[J].飞行力学,2005(4):13-15,19.
[2]李进涛. 飞翼式高空长航时无人机飞行品质特性研究[D].西北工业大学,2007.
[3]朱书峰. 微型飞机设计相关技术关键问题的研究与探讨[D].西北工业大学,2005.
[4]赵建伟,周洲,邹定玉,龚喜盈.复杂系统飞机飞行品质等效方法研究[J].计算机仿真,2006(12):70-73.
[5]聂瑞,章卫国,李广文,刘小雄.基于改进的NSGA-Ⅱ算法的飞机等效拟配[J].西北工业大学学报,2011,29(01):27-33.
[6]王锋,祁圣君,张喆.几种典型飞行品质对无人机的适用性研究[J].飞行力学,2013,31(05):389-393.
[7]马璐. 无人机地面遥控遥测系统研究[D].南昌航空大学,2013.
[8]杨俊,张永,肖艳平.飞机飞行品质规范及评价准则[J].中国科技信息,2017(08):16-17.
[9]华玉光,徐浩军,葛志浩.某型飞机横航向飞行品质研究[J].飞行力学,2005(03):21-24.
[10]潘文俊,樊战旗,王敏文,孙逊.无人机飞行品质评定准则探讨[J].飞行力学,2016,34(01):6-9.
【通联编辑:梁书】
猜你喜欢
家庭影院技术(2021年2期)2021-03-29
淄博师专论丛(2019年1期)2019-04-04
建筑热能通风空调(2018年5期)2018-07-09
人间(2016年26期)2016-11-03
铁道通信信号(2016年1期)2016-06-01
广西林业科学(2016年4期)2016-03-16
