
一种基于观测站数目最小化的TDOA/FDOA无源定位算法
2019-09-25 06:02孙霆董春曦董阳阳刘明明
航空学报 2019年9期
孙霆,董春曦,董阳阳,刘明明
西安电子科技大学 电子工程学院,西安 710071
无源定位算法是指定位系统不向被定位目标发射电磁波信号,而是仅利用目标辐射源的辐射信息,确定出目标位置的一种技术[1],被广泛应用在无线传感器网络[2-4]、雷达[5-6]以及声呐系统[7-8]等领域中。对于静止目标,无源定位技术主要是依靠不同类型的观测量,包括到达时间(Time of Arrival,TOA)、到达时间差(Time Difference of Arrival,TDOA)、到达角(Angle of Arrival,AOA)、以及上述参数的相互结合。而当观测站与目标存在相互运动时,可以联合TDOA以及到达频率差(Fequency Difference of Arrival,FDOA)观测量对目标的参数进行估计。
本文主要针对TDOA/FDOA定位算法进行研究,该定位体制中由于目标参数与观测量存在非线性关系,因此求解变得比较困难。比较经典的TDOA/FDOA定位算法包括一些迭代算法[9-12]、两步加权最小二乘(Two-Stage Weighted Least Squares,TSWLS)算法[13-14]、半定松弛(SeminDefine Relaxation,SDR)算法[15-16]、多维标度(MultiDimensional Scaling, MDS)算法[17-18]。文献[9-12]均为迭代算法并且都具有良好的估计性能,但是这些迭代算法的收敛性受初值影响较大,当初值选取较差时,定位精度无法保证,并且迭代结构要求这些算法需要繁琐的计算。
为了克服迭代算法的缺点,文献[14]提出了经典的两步加权最小二乘算法。该算法首先通过引入中间变量建立一组关于TDOA与FDOA的伪线性方程,通过加权最小二乘(Weighted Least Squares,WLS)技术得到了目标参数与中间变量的初始估计值,随后利用中间变量与目标之间的约束关系进一步提高精度。这种TSWLS算法是一种闭式解(Closed-Form Solution),不存在收敛问题,并且在低噪声水平下,其定位精度能够达到克拉美罗界(Cramér-Rao Lower Bound,CRLB),但是TSWLS并不能很好地适应大的测量噪声。随后文献[16]将多维标度(MDS)的算法引入到TDOA/FDOA的定位体制中,文献[17-18]使用半定松弛(SDR)算法对目标参数进行估计,在噪声水平较大时,这些算法性能均优于传统的TSWLS算法。
MDS和SDR算法虽然有良好的性能,但是都需要大量的运算。为了能够降低计算复杂度,文献[19-20]分别提出了两种改进的TDOA/FDOA运动目标两步定位算法。这两种算法的第1步均与传统TSWLS的第1步相同,主要差异体现在第2步的处理上:文献[19]中算法的第2步是对第1步定位误差进行估计并且修正第1步得到的估计结果;文献[20]中算法的第2步利用中间变量与目标参数之间的关系建立了新的等式并且利用WLS求解。与传统的TSWLS相比,这两种算法不仅计算简便,测量噪声较大时的定位精度也进一步提高。
传统的TSWLS及其改进的闭式算法[19-20]虽然都能够有效提升TDOA/FDOA定位性能。但是通常而言,对于一个3维空间的无模糊定位最少需要4个观测站,而这些算法至少需要5个观测站才能达到理论精度。针对这一问题,本文提出了一种基于观测站数目最小化的TDOA/FDOA定位算法,这种算法对目标定位只需要4个 观测站。该算法第1步首先对TSWLS中的伪线性方程重新表示,分离未知参数,根据中间变量与目标参数的关系,建立了只含有中间变量的多项式并且求解,随后给出了目标位置以及速度的估计值;算法第2步使用泰勒级数对中间变量一阶展开,将其表示为目标位置与速度估计误差的线性函数,得到第1步定位误差的最佳线性无偏估计量。随后,基于第2步的误差估计值,对第1步得到的目标参数估计值进行修正。本文所提出的算法不存在收敛问题,是一种闭式解;此外本文还推导了当测量噪声较小时新算法可以得到CRLB精度。仿真实验不仅证明了使用4个观测站估计远场或者近场目标,测量噪声较小时新算法便能够实现CRLB,同时还表明在额外增加1个 观测站的条件下新算法比改进的TSWLS算法具有更好的鲁棒性。
本文中*°表示测量值*的真实值。O和0分别代表元素均为0的矩阵以及向量。
1 定位场景

目标与第i个观测站的真实距离为
(1)

(2)

2(si-s1)Tuoi=2,3,…,M
(3)
式中:M-1组曲面的交点给出了目标位置的估计值,但是无法给出目标速度的估计值。由于目标与观测站之间存在相对运动,因此通过观测站可以获得关于到达频率差(FDOA)的信息,联合TDOA与FDOA信息不仅可以进一步提高定位精度,同时也可以给出目标速度的估计值。
对式(1)关于时间求导,距离变化率与目标参数的关系为
(4)
为了利用FDOA的信息,对式(3)关于时间求导可以得到一组关于FDOA的方程
i=2,3,…,M
(5)


(6)

(7)

J=(m-mo)TQ-1(m-mo)T
(8)
2 降维定位算法
2.1 算法第1步
将测量向量r=ro+cΔt代入式(3)并且只保留噪声的线性项,则式(3)变为
(9)

(10)
(11)

i=2,3,…,M
(12)

(13)
Γ1、Γ2和B1、Bt、Bf的表达式分别为
(14)
(15)
(16)
式中:θ的前3个元素为目标的位置估计值,后3个 元素为目标的速度估计值,而W1、α、β和γ的表达式分别为
(17)
式(16)给出了目标位置-速度由中间变量表示的方程,同时表明了求解目标参数需要已知中间变量。因此,接下来将给出中间变量的求解过程。
(18)
式中:G1,t、h1,t以及Bt在式(12)、式(13)和式(15)中已经给出了定义,矩阵Wt为
(19)
α1与β1的表达式分别为
(20)
(21)
(22)

降维算法第1步计算过程需要注意以下几点。
注意1式(17)加权矩阵W1的计算与未知参数有关。为了解决这个问题,首先令W1=Q-1,通过式(16)得到未知参数的初始估计值;随后将初始值代入W1=(B1QB1T)-1得到更新后的加权矩阵,利用新的加权矩阵进一步给出更精确的估计值。
注意2二次多项式(21)和式(22)可能会得到多个中间变量解,因此有多组位置-速度估计值,为了解决这个问题,选择使式(8)的ML代价函数最小化的解作为最终的估计值。
注意3在三维定位场景下,所有的观测站不能处于同一个平面,这样才能够保证G1列满秩,进而通过WLS得到唯一解。
2.2 算法第2步
第1步的估计值可以表示为
θ=θo+Δθ
(23)

国际工程教育认证以学生为中心、产出导向、持续改进作为三大基本倡导理念。IEET所提出的专业认证标准可以归纳为专业培养目标、学生、教学成效与评量、课程组成、教师、设备及空间、行政支持与经费、领域认证规范、持续改善成效等九大规范,这些规范又可划分为教学、保障和持续改进三个方面。其中,培养目标内容包括培养目标要求、内容和修订机制[4],在整个认证过程中起到纲领性作用,反映学生毕业5年后所能够达到的职业层次和专业成就。
(24)
(25)

a=(u-s1)/r1
(26)
(27)
式(23)~式(25)代入式(11),仅保留线性误差项可以得到新的等式方程为
h2-G2Δθ=cB1n
(28)

(29)
G2,t和G2,f均为(M-1)×3维的矩阵,并且他们的每一行可以分别表示为

(30)
式(28)的解通过加权最小二乘法给出为
(31)


(32)
2.3 使用接收观测站个数的分析
对式(11)进行简单的变形,可以得到传统TSWLS的第1步伪线性方程为
h1-G′φo=cB1n
(33)

传统TSWLS的第1步对中间变量与目标位置同时求解,因此对于传统的TSWLS来讲,要保证式(33)是非欠定方程,在三维定位场景下必须满足2(M-1)≥2×(3+1),也就是说至少需要5个观测站;而本文提出的降维算法先对参数φo中的中间变量进行求解,随后在对θo求解,这样避免了同时求解中间变量与目标位置,达到了降维的目的,进而保证式(11)和式(28)为非欠定方程只需满足2(M-1)≥2×3,因此本文所提出的算法仅需要4个观测站。
3 性能分析
本节给出降维算法的性能分析,首先证明了降维算法给出的是无偏估计值,随后推导了该算法的协方差矩阵,并且与CLRB进行了比较,理论证明了在低噪声水平下,该算法可以达到CLRB。
降维算法中第2步Δθ的估计值可以表示为

(34)
式中:δθ为估计误差。
将式(23)和式(34)代入式(32),则最终估计值的期望偏差与协方差矩阵可以分别表示为-E(δθ)和cov(δθ)。式(31)代入式(34),得到估计误差δθ的表达式为
(35)
式(35)中,由于矩阵G2以及n均包含噪声项,因此偏差期望-E(δθ)与协方差cov(δθ)并不容易计算。但是在噪声较小的情况下,G2中测量值的噪声项可以忽略不计,此时式(35)是误差项δθ关于噪声n的一组线性等式,由于n服从零均值高斯噪声分布,从而-E(δθ)=0。因此本文所提出的算法在噪声较小的假设下可以给出目标参数的无偏估计值。更进一步,目标参数估计的协方差矩阵为
(36)

接下来证明当噪声较小情况下,本文所提出的算法能够实现运动目标的克拉美罗下界。文献[21] 已经给出运动目标的克拉美罗下界为
(37)

4 仿真实验
本节给出了仿真实验进一步验证本文所提出算法的定位性能。假设TDOA与FDOA测量误差之间相互独立,则距离差及其变化率测量误差的协方差矩阵为Q=blkdiag(Qt,Qf),其中Qt=σ2R以及Qf=0.01σ2R[20]。这里,σ2为测量噪声的方差,R是对角线元素均为1,其他元素为0.5的矩阵。仿真通过计算机进行多次蒙特卡罗实验获取目标位置和速度估计的均方根误差指标来评估算法的性能,蒙特卡罗仿真次数设置为l=10 000次,均方根误差(RMSE)指标定义为
(38)

本文考虑两种仿真情形:场景1在三维场景中仅使用4个观测站进行定位,场景2在同样的条件下增加一个观测站进行定位。其中,在每种场景仿真中均考虑了近场条件以及远场条件。在场景1中对比算法使用了文献[9]中的泰勒级数迭代算法,为了保证其较好的收敛性,初值选取了目标的真实位置与速度;场景2中对比算法包括文献[13]传统的TSWLS、文献[19-20]中改进的TSWLS算法。CRLB作为检验估计性能的标准在两种场景中均给出。

如图1(a)所示,对于近场目标位置估计,当测量噪声低于5 dB时,降维算法与泰勒级数展开算法均能够达到CRLB。当噪声达到10 dB时,本文所提出的算法与泰勒级数展开的算法均开始偏离CRLB,但是泰勒级数展开的算法受噪声影响较大,偏离程度较大,产生了“门限效应(Threshold Effect)[13]”,无法给出比较准确的估计值。值得一提的是,低噪声时泰勒级数展开的算法之所以具有如此好的估计性能,主要是因为初值选取了目标的真实位置,迭代至少进行3次收敛性及估计精度便能够得到保证。
如图1(b)所示,近场目标速度的估计与位置估计情况大致相同,低噪声时两种算法的估计性能均能达到CRLB。当噪声达到10 dB时,两种算法均开始偏离CRLB,但是本文提出的算法能够更好地适应大的测量噪声,具有更好的鲁棒性。

表1 场景1中观测站的位置与速度Table 1 Positions and velocities of stations in Scenario 1
而对于远场目标位置与速度的估计,如图2所示,在测量噪声较小的时候,两种算法均能够达到CRLB,随着测量噪声的增加,当噪声到达-5 dB 时,泰勒级数展开的算法同样会产生门限效应,而本文提出的算法依旧十分接近CRLB。
值得注意的是,场景1对运动目标参数的估计仅仅使用4个接收观测站便可以达到CRLB定位精度,而对于传统的TSWLS或者是其改进算法还需要至少额外增加一个观测站才能进行定位求解,本文所提出的算法使用了最少的观测站数量。

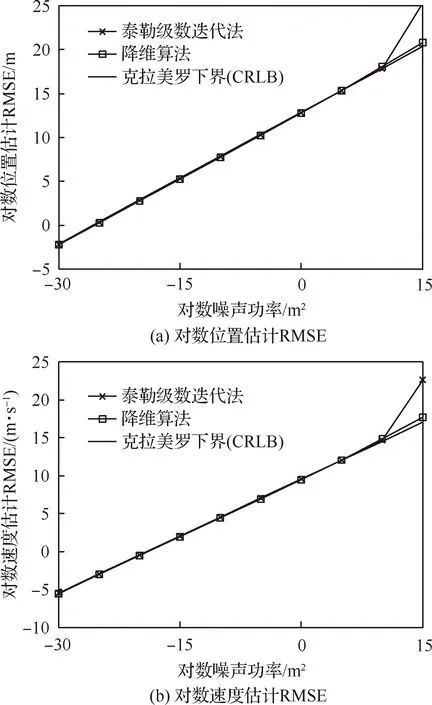
图1 使用4个观测站时近场目标位置和速度估计均方根误差对比Fig.1 RMSE comparisons of near field position and velocity estimation of in the four stations condition
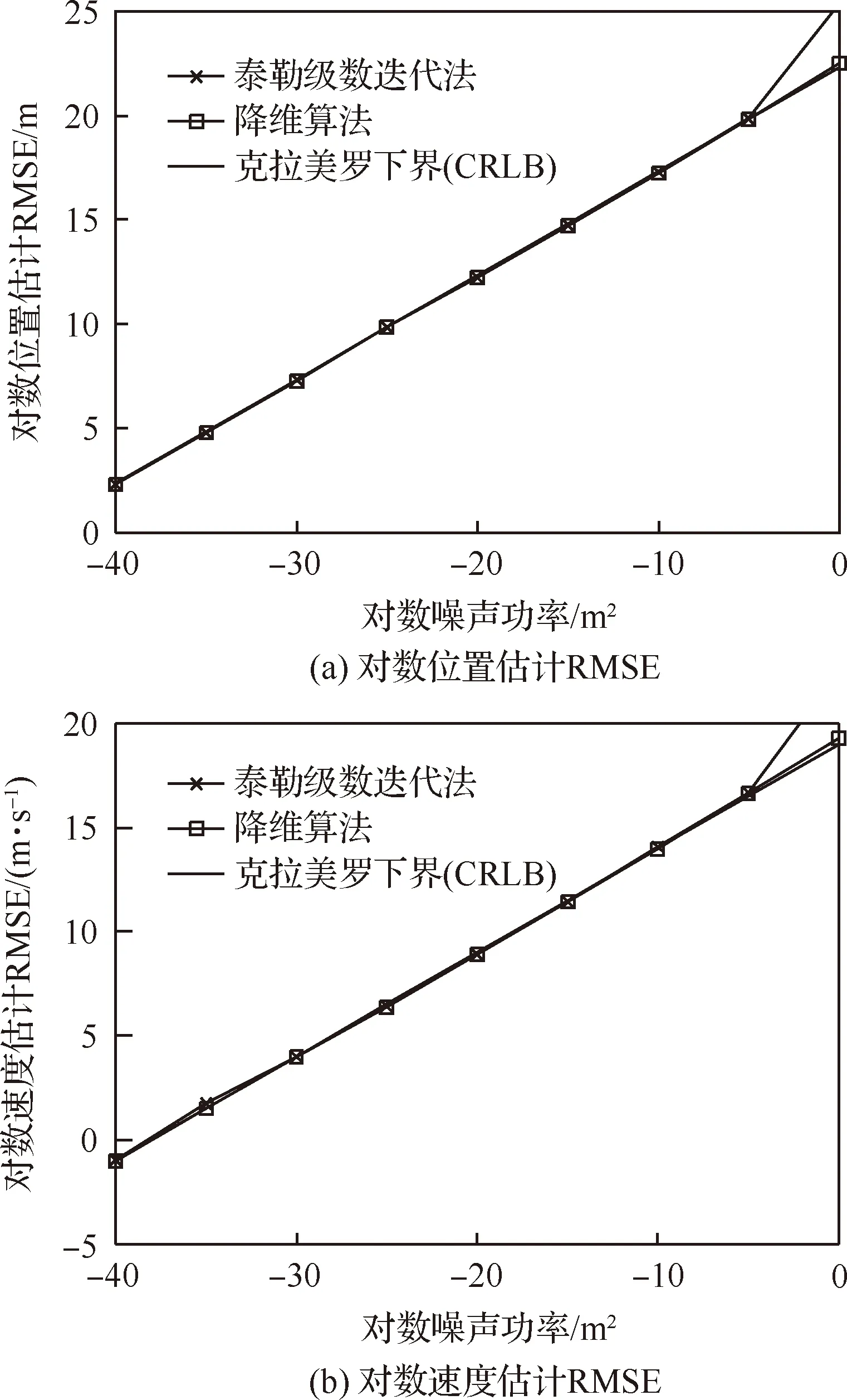
图2 使用4个观测站时远场目标位置和速度估计均方根误差对比Fig.2 RMSE comparisons of far field position and velocity estimation in four stations condition
从图3(a)中可以看出,定位系统存在有5个观测站时,对于近场目标位置估计,当测量噪声误差不超过-10 dB时,4种算法均能够达到CRLB。当噪声高于-5 dB时,传统的TSWLS开始偏离CRLB曲线,这主要是由于其第2步认为噪声较小时可以忽略二次误差项,但是当噪声较大时忽略二次项误差便会导致定位性能下降。另外,当噪声高于10 dB时两种改进的TSWLS算法逐渐偏离CRLB;当测量噪声到达15 dB时,使用本文算法得到的位置估计均方根误差比其他两种改进的TSLWS算法提高了约1 dB。
从图3(b)可以看出,对于近场目标速度的估计,在低噪声水平除了传统TSWLS算法,其他算法均可以达到CRLB。当测量噪声水平较高时,对比算法性能逐渐下降。其中,文献[19]中的算法在噪声高于0 dB时明显开始偏离CRLB,而当噪声高于5 dB时,文献[20]中的算法同样发生偏离。本文提出的降维算法即使在较大噪声水平下,也十分接近CRLB。当测量噪声到达10 dB时,降维算法得到的速度估计均方根误差比文献[19] 的算法降低了4.5 dB,比文献[20]的算法减少了1.5 dB。仿真实验证明了本文所提出的定位算法具有更好的鲁棒性。
而对于远场目标位置与速度的估计,如图4所示;在低噪声水平下,传统的TSWLS、两种改进的TSWLS算法以及本文提出的算法均能够实现CRLB,给出良好的定位性能。而随着噪声的增大,传统的TSWLS和文献[19-20]中两种改进TSWLS算法均会相继偏离CRLB,无法给出比较精确的目标位置以及速度估计值,而本文提出的算法依旧十分接近CRLB,仿真实验表明了本文所提出的算法能够更好地适应大的测量噪声。
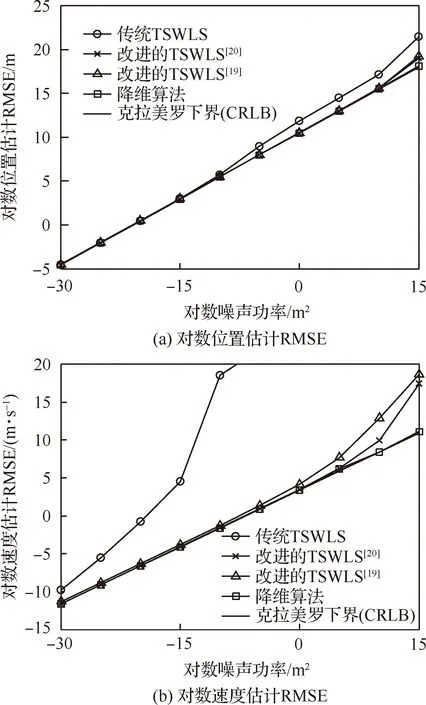
图3 使用5个观测站时近场目标位置和速度估计均方根误差对比Fig.3 RMSE comparisons of near field position and velocity estimation in five stations condition
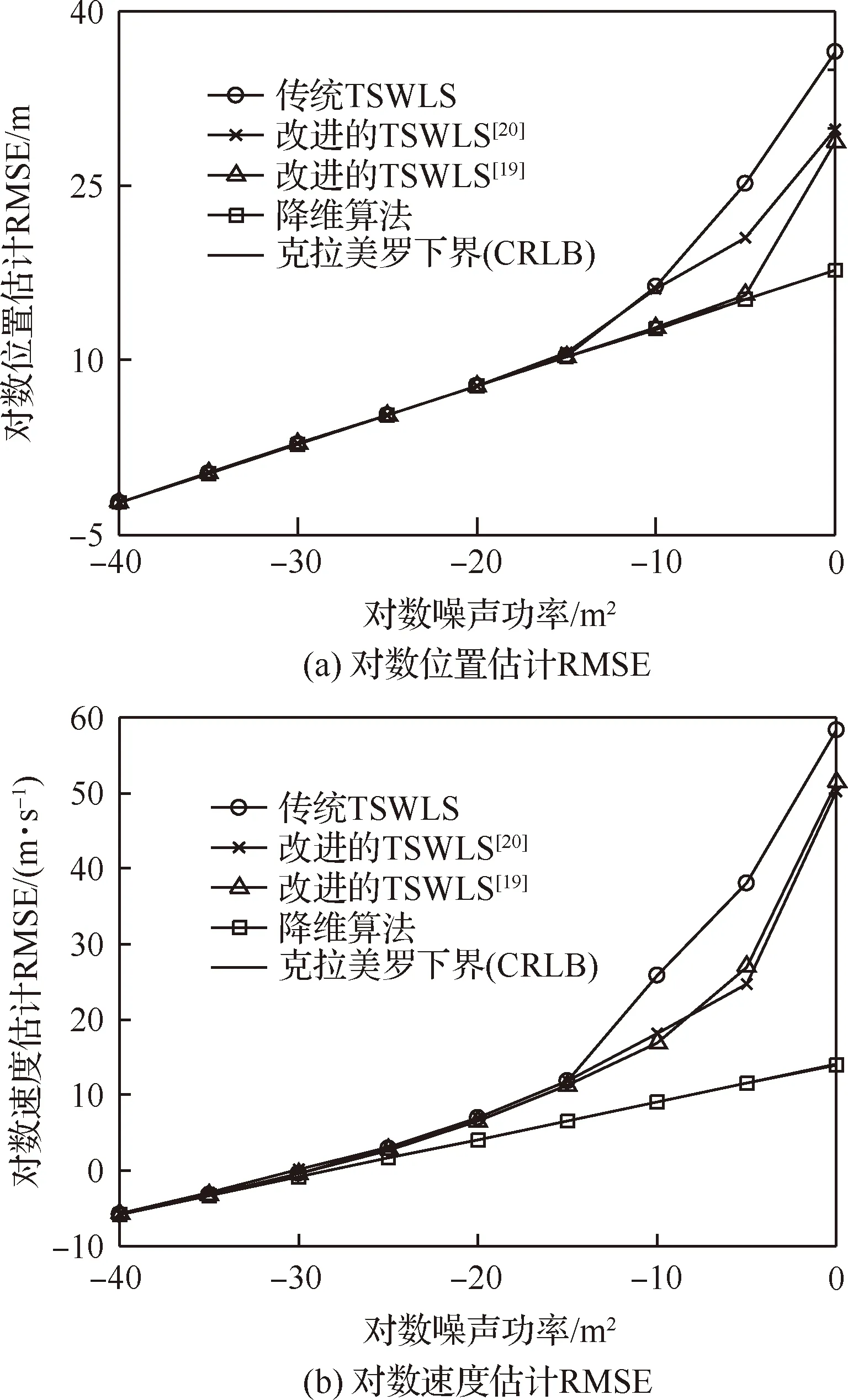
图4 使用5个观测站时远场目标位置和速度估计均方根误差对比Fig.4 RMSE comparisons of far field position and velocity estimation in five stations condition
5 算法计算量分析
本节主要对所提出降维算法的运算量进行了分析,为了分析简便,主要以实数乘法进行分析;并且分别与传统的TSWLS[13]和文献[19-20]中两种改进TSWLS计算量进行了对比。
首先分析本文算法第1步的计算量:




接下来给出第2步计算量的分析过程:

此外,由于需要对加权矩阵初始化,第1步中2)和4)各需要计算2次,因此本文提出的算法一共需要27M3+51M2+363M+889次的实数乘法运算,文献[19]给出了改进TSWLS的计算量为48M3-48M2+768M+7 212,与传统TSWLS需要48M3-48M2+768M+8 010次实数乘法相比,运算量相当;通过计算,文献[20]改进的TSWLS算法需要进行48M3-48M2+768M+4 012次实数乘法,本文所需要的实数乘法次数小于文献[20]中所需的实数乘法,因此本文算法运算量更小。
6 结 论
1) 在目标处于运动状态的三维无源定位场景下,针对传统TSWLS及其改进的闭式算法精确定位至少需要5个观测站的问题,本文联合TDOA以及FDOA,提出一种最小化观测站数目的无源定位算法。该闭式算法仅需要4个观测站即可进行定位,理论分析表明该算法在低噪声水平下能够达到CRLB。
2) 仿真实验证明了算法的有效性:仅使用4个 观测站,测量噪声较小时该算法便可以达到CRLB精度;若额外增加一个观测站,相比与传统的TSWLS以及改进算法,在不增加算法计算量的前提下,该算法在测量噪声较大时能提供更精确的目标参数估计值。
附录A:

首先当测量噪声较小时有如下条件成立


(A1)

(A2)
(A3)
(A4)
(A5)

根据式(15)和式(30)分别对B1以及G2的定义,-L可以进一步表示为
(A6)


i=2,3,…,M
(A7)
利用条件1和2,分别有如下近似
(A8)
(A9)
利用式(A8)和式(A9),式(A7)可以近似为
i=2,3,…,M
(A10)
i=2,3,…,M
(A11)
同样利用条件1和2,可以分别得到如下近似等式
(A12)
(A13)
利用(A12)与式(A13),式(A11)可以近似表示为
猜你喜欢
山东理工大学学报(自然科学版)(2022年5期)2022-08-18
科学导报(2022年39期)2022-07-04
中国畜牧杂志(2022年4期)2022-04-15
西南交通大学学报(2022年1期)2022-02-11
舰船科学技术(2021年12期)2021-03-29
火控雷达技术(2020年3期)2020-10-13
优雅(2019年7期)2019-07-03
科教导刊·电子版(2019年12期)2019-06-12
劳动保护(2019年3期)2019-05-16
饮食科学(2016年7期)2016-07-27
