
一次DEH转速信号损坏引起的汽轮机跳闸分析
2019-09-25 13:22杨志军
数字技术与应用 2019年6期
杨志军
摘要:山西兆丰铝电有限责任公司自备电厂2#机组在运行过程中,由于汽轮机两路速度传感器故障,转速测量出现误差,DEH系统超速保护动作,造成汽轮机跳闸。为了能够有效避免这种因部分速度传感器损坏,造成汽轮机主保护误动作发生。本文对DEH系统中超速保护动作条件和SD模块中速度的优选算法进行了研究,提出一些优化方案。
关键词:DEH;转速;SD模块;跳闸
中图分类号:TM621 文献标识码:A 文章编号:1007-9416(2019)06-0060-02
1 电厂DEH系统及测速模块(以下简称SD模块)简介
电厂装机容量为3×135MW,三台汽轮机是哈尔滨汽轮机厂有限责任公司生产的超高压、一次中间再热、单轴、双缸、双排汽抽凝式汽轮机。与该机组配套的数字电液调节系统(DEH)采用北京国电智深控制技术有限公司EDPF-NT型分散控制系统硬件,主要实现超速保护(OPC)、汽机基本控制(BTC)和汽机自启停(ATC)等功能。液压部分采用了高压抗燃油装置,工作压力为12~14Mpa,系统采取一对一的方式来实现对汽轮机的控制,即DEH发出的阀位控制指令通过7块EDPF-VCⅡ卡分别送到7个调节汽门(4个高压调节阀、2个中压调节阀、1个抽汽调节阀)的电液伺服阀(MOOG阀)上;MOOG阀将电信号转换成液压信号,由安装在油动机上的高压抗燃油执行机构直接带动调速汽门的蒸汽阀头开启和关闭。
SD模块是DEH系统中的速度测量模块,主要用于汽轮机转速的测量、优选正确的速度信号给DEH系统。每一块SD模块有三个模拟量信号输入(AI)通道,能够测量三个速度信号,SD模块接受到速度信号后通过三个独立的波形整形电路、放大模块、方波产生器、至计数器、CPU 定时读取计数器的值,并通过标准时钟校准,精确计算出每一个速度值。通过优选算法對接受到的三个速度值进行优选,选中正确的速度值,反馈给DEH系统。同时,当选中的速度值大于3090时,通过两路数字量输出信号,发出 OPC 信号至工作现场。也就是说汽轮机OPC保护的实现是通过SD模块内部计算,直接作用于汽轮机的调节汽门,实现汽轮机的103%超速保护。
2 DEH系统超速保护设计
DEH系统一共有三个超速的保护,即103%超速保护(OPC)、DEH 110%电气超速跳闸(AST)、113%机械超速跳闸。
103%超速保护是指汽轮机甩负荷油开关跳闸或发电机并网前速度超过3090RPM时,OPC电磁阀动作,所有调节阀立刻关闭,保持3秒或速度降低到3060RPM后再重新打开。103%超速保护动作时,只关闭调节阀,主汽门不动,即汽机不跳闸。103%超速保护动作后,汽轮机速度被控制维持在3000转/min。
110%电气超速跳闸是指速度超过3300转/min。时,DEH系统发出调整信号到ETS(汽轮机危急遮断)系统,使AST电磁阀动作,调节阀关闭,主汽门关闭,汽轮机跳闸,速度惰走。
113%机械超速跳闸是指速度超过3360转/min。时,机械撞击子在离心力的作用下飞出,使保安系统动作,调节阀关闭,主汽门关闭,汽轮机跳闸,速度惰走。
3 本次跳闸原因分析
我厂汽轮机共有七个速度传感器测量速度,其中一个速度传感器信号输出到汽轮机前箱上的速度表。三个电涡流速度传感器信号输出到TSI(汽轮机安全监视)系统,TSI系统通过运算,当三个速度信号有两个大于3300时,输出110%超速,发出汽轮机跳闸信号。三个磁阻式速度测量传感器,分别输入到DEH系统的两块SD模块中。每一块SD模块同时接受三个速度信号,SD模块接受到三个速度信号后,选出数值最大的速度信号作为优选速度信号,输出给DEH系统,参与汽轮机的自动控制调节。
SD模块除了能够通过优选算法选择出最高速度外,还可以对速度信号是否正常进行判断,判断的逻辑是在油开关闭合的状态下,当测量速度小于2950时,判断为速度故障。如果有一路速度故障则输出一路速度不可靠信号到DCS系统,如果两路故障则输出两路速度不可靠信号到DCS系统。DEH在接受到两路速度不可靠信号之后,输出跳闸信号到汽轮机主保护系统。本次跳闸的原因就是因为DEH接受到两块SD模块中的两路速度信号不可靠从而发出跳闸信号的。
但是运行人员在操作画面上得到的跳闸信息是DEH超速。从而对机组故障的处理造成了一定的延误,主要是因为两路速度故障时发出的跳闸信号和DEH超速时发出的跳闸报警在DEH系统中使用的报警通道是一个通道,都是通过DEH系统内的一块DO卡输出数字量信号到ETS系统,所以造成了跳闸信号和实际发生的现象不一致。
4 DEH跳闸逻辑和SD模块速度优选算法的研究
汽轮机有六个速度传感器作为超速保护的信号,其中到DEH系统的三路速度信号,主要用于DEH逻辑中汽轮机的调整和DCS画面速度的显示。到TSI系统的三路速度信号专门用于汽轮机超速保护的使用。在DEH逻辑中,除了110%超速跳闸外,当两块SD模块都输出两路速度故障时,汽轮机也要跳闸停机。
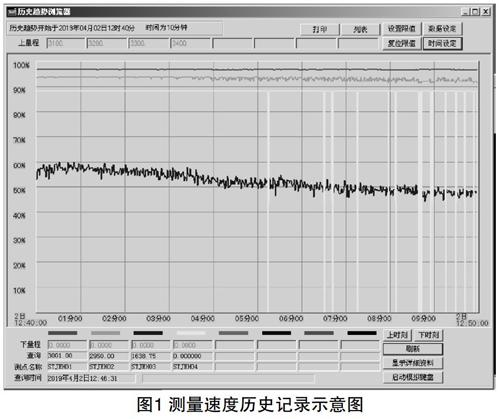
国电智深EDPF-NT分散控制系统中的SD模块对速度故障的优选算法为:SD模块接受到两路速度低于2950时,自动判断为所有的速度都有问题,并且将优选输出速度值变为0输入到DEH系统。如图1所示,历史曲线中我们可以看到:红色、绿色、蓝色曲线分别是速度1、速度2、速度3,黄色曲线为SD模块优选输出的速度。我们可以看到速度3为1595,此时SD模块输出报警值一路速度不可靠。当到12:48分7秒时,速度2变为2926,SD模块输出报警值两路速度不可靠信号,同时优选输出的速度变为0,速度1始终是正常的。
SD模块接受到两路速度坏就判断汽轮机的实际转速有问题有些不妥。因为,发电机并网的状态下,汽轮机的转速在3000转/min是常态,实际转速与3000转/min偏差大的话,相应的发电机保护就会动作。所以,SD模块对速度的判断应该改为:在并网状态下接受到的三个速度信号中有一个是3000的话,就认为当前的汽轮机实际转速为3000。同时输出两路速度故障报警到DCS系统,让检修维护人员尽快查清故障原因。SD模块的作用主要是通过优化算法给DEH系统提供真实的汽轮机转速信号。而在这次跳闸时,汽轮机的运行正常,属于保护的误动作。因此,两路速度故障作为主保护信号停机并不妥当。
5 结语
SD模块通过优选算法如何选出正确的速度值,不仅要考虑现场故障速度传感器数量的多少,也要考虑正常速度传感器的测量值。在SD模块接收到两个速度信号故障时,不能直接将优选速度输出为0,应该输出未判断为故障的那個速度传感器测量值。这样能有效杜绝汽轮机超速主保护的误动作。同时DEH系统也不应该将部分速度传感器故障作为汽轮机的主保护。
参考文献
[1] EDPF-NT分散控制系统硬件手册[K].国电智深,2005.
[2] DEH系统逻辑手册[K].哈尔滨自动控制有限公司,2005.
Analysis of Steam Turbine Trip Caused by Damage of Primary DEH Speed Signal
YANG Zhi-jun
(Shanxi Zhaofeng Aluminum and Electricity Co., Ltd.Self-owned Power Plant,Yangquan Shanxi 045000)
Abstract:Shanxi Zhaofeng Aluminum and Electricity Co., Ltd.Self-owned Power Plant,The second electric generating unit,Because the faults of Two Speed Sensors in Steam Turbines.There are errors in speed measurement and overspeed protection action of DEH system, which results in turbine tripping. In order to effectively avoid the damage of some speed sensors, the main protection malfunction of steam turbine occurs. In this paper, the operation conditions of overspeed protection in DEH system and the optimal algorithm of speed in SD module are studied, and some optimization schemes are put forward.
Key words:Digital Electro-hydraulic;speed;speed module;trip
猜你喜欢
科学与财富(2016年29期)2016-12-27
科技创新与应用(2016年34期)2016-12-23
