基于走航观测的长江三角洲地区大气污染特征及来源追踪
2019-09-26 03:20杨丹丹王体健马超群
中国环境科学 2019年9期
杨丹丹,王体健,李 树,马超群,刘 冲,杨 帆
基于走航观测的长江三角洲地区大气污染特征及来源追踪
杨丹丹,王体健*,李 树,马超群,刘 冲,杨 帆
(南京大学大气科学学院,江苏 南京 210023)
为了加强对长江三角洲地区大气污染分布特征和输送规律的认识,利用移动车载设备开展了不定期的走航观测,重点研究了2016-2018年冬季灰霾污染和春季光化学污染条件下长江三角洲地区的大气污染特征.结果表明,走航观测期间长江三角洲地区PM2.5日均浓度为60~122 μg/m3,东部的常州、无锡一带,西部的合肥、芜湖地区,北部蚌埠、滁州一带,南部湖州、杭州地区的PM2.5浓度较高,比其他地区高出20%~40%.O3日均浓度水平为9~52 μg /m3,苏州、盐城、宣城与湖州地区浓度相对较高.运用FLEXPART_WRF模式,结合PM2.5排放清单,分析了走航观测期间长江三角洲地区及沿线城市PM2.5的潜在来源.结果发现,东风条件下,南通及上海地区为PM2.5的潜在源区,北风条件下,连云港、盐城等地区贡献较大.运用FLEXPART前向轨迹计算模块,对一次污染个例过程进行了模拟,并利用走航观测结果进行了验证,发现模拟结果与走航观测结果的相关系数达到0.9.可见,长江三角洲地区存在区域性的PM2.5和O3污染,走航观测结合轨迹分析是追踪污染气团输送的有效手段.
长江三角洲;大气污染;走航观测;FLEXPART;WRF
长江三角洲地区是大气污染最严重的三大区域之一, 2018年长江三角洲地区平均超标天数比例为25.9%.自2013年国务院发布《大气污染防治行动计划》以来,经过6a的治理,长江三角洲地区大气环境已经产生了新的变化.因此有必要重新认识长江三角洲地区大气污染特征及来源,为污染治理提供新的方向.
走航观测是定量认识区域大气污染特征的强有力的手段,相比于地面固定站点监测与遥感监测,走航观测的监测范围广,分辨率高,可进行实时测量,有着较强的机动性[1].因此,走航观测是追踪污染气体演变和来源的有效技术手段,有助于加深对区域大气污染分布特征和输送规律的认识.运用车载DOAS系统,国内外研究者展开了广泛的研究.譬如,Wagner等[2]测量了对流层NO2并与卫星测量进行对比.樊文智等[3]针对2015年徐州市不同污染过程,利用激光雷达与走航观测,对气溶胶分布特征进行了分析.走航观测结合气象预报模式、污染物扩散模式,也是应对突发性大气污染、监督和评估工业园区气体泄漏[4-5]、气态污染物无组织排放的有效手段.走航观测还可为大型活动空气质量保障提供技术支撑,如张祥志等[1]将其观测结果服务于亚青会空气质量保障等.
轨迹模式是研究大气污染来源的重要方式, FLEXPART作为常用的轨迹模式,能有效地结合区域气候模式进行各种实验[7-11].程巳阳等[12]结合排放清单,对北京地区CO浓度变化及其源区分布特征进行了研究.余钟奇等[13]利用WRF探讨了不同天气分型下影响上海的主要污染物来源.Miao等[14]研究了津京冀地区灰霾事件的污染物传输机制.
本文基于2016~2018年长江三角洲地区的多次走航观测资料,分析了该地区大气污染的时间变化和空间分布特征.运用FLEXPART和WRF模式,进行前向和后向模拟.利用后向模拟对大气污染的来源进行追踪,结合PM2.5排放清单,追溯长江三角洲地区大气污染的潜在源区以及各个潜在源区对长江三角洲地区PM2.5的相对贡献大小,结合走航观测结果,探究了沿线城市污染来源的不同特征.运用FLEXPART前向轨迹模块以及定量估计算法,模拟2017年12月4日长江三角洲地区的一次污染个例,并用走航观测结果进行验证.
1 研究方法
1.1 走航观测
1.1.1 移动监测平台 本文采用的移动观测车由气象观测系统、大气成分观测系统、数据采集和显示系统、音视频会商系统和无线数据通讯系统等几部分组成,从而构成一个完整的平台.大气成分观测系统由二氧化硫/硫化氢分析仪(AF22M)、氮氧化物分析仪(AC32M)、一氧化碳分析仪(CO12M)、臭氧分析仪(O342M)、二氧化碳分析仪、VOC分析仪(VOC72M)、PM10/PM2.5/PM1监测仪(MP101M+ CPM)、零气发生器以及相应的标气组成.
1.1.2 走航观测方案 4次走航观测的时间与路线见表1和图1.从时间上来看,4次走航时间跨度大,包括2016年、2017年、2018年共3a时间,主要在冬季(12月)和春季(3月)进行.在实际走航观测中,具体时间根据模式预报结果而定,若模式预报某时间污染物浓度将明显上升,则走航观测时间将包括污染天气当天以及污染天气前后1d.通过这样的走航时间设计,可以最大程度的捕捉大气污染产生输送的各个阶段,较大程度地发挥走航观测机动性的优点.同时利用走航日记,记录走航过程中的实时情况.如仪器何时正常工作与出现故障、何时经过隧道与服务区、所经道路是否进行施工等,清楚地了解观测的整体情况,便于对数据进行订正与处理.从走航路线上来看,走航空间跨度较大,途径江苏、浙江、安徽三省,基本形成覆盖长江三角洲区域的走航观测网,对分析长江三角洲地区大气污染的时空分布特征提供了有力的数据支撑.
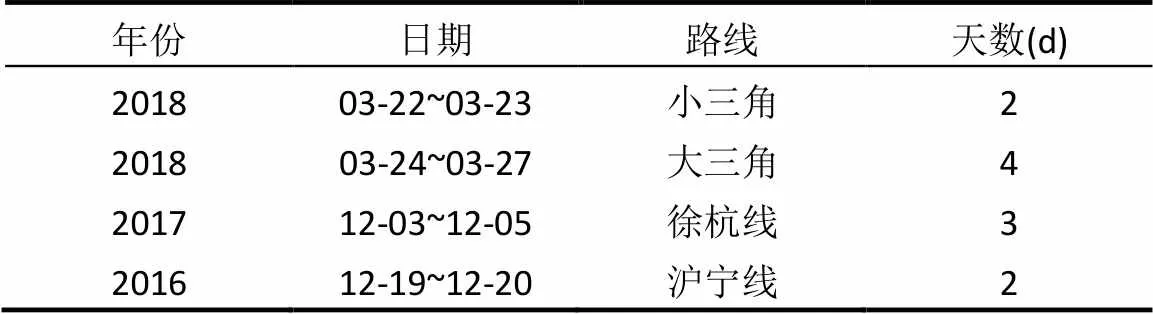
表1 走航观测时间

图1 走航观测线路
1.2 FLEXPART_WRF模式
1.2.1 WRF模式与设定 本文使用WRF v3.8的输出结果作为FLEXPART的气象驱动场.模拟采用l°×1°NCEP全球再分析气象资料作为初始值和边界值,采用四重嵌套,水平分辨率为81,27,9和3km,垂直层次分为32层,时间步长为360s.陆面过程为Noah,边界层方案为YSU,微物理过程为WSM5,积云对流为Grell-Devenyi,短波辐射方案为Goddard,长波辐射方案为RRTM.模拟时间分3个时段,第一段为2016年12月14日8:00~2016年12月21日8:00(北京时间,下同),第二段为2017年11月30日8:00~ 2017年12月5日8:00,第三段为2018年3月21日8:00~2018年3月28日8:00.模拟结果每24h输出一次,其中前16h作为模式预热时间.
1.2.2 FLEXPART模式与设定 FLEXPART模式主要通过计算点、线、面或者体积源释放的大量粒子的轨迹来描述示踪物在大气中长距离、中尺度的传输、扩散、干湿沉降和辐射衰减等过程.该模式通过时间的前向运算来模拟示踪物由源区向周围的扩散,通过后向运算来确定对于固定站点有影响的潜在源区的分布.
后向模拟(LDIRECT=-1)粒子排放的源设为面源,排放区域分两类:一类为长江三角洲地区,探究整个地区的污染潜在来源;另一类则根据走航观测结果,选择污染物浓度相对较高的城市作为排放源,粒子排放时间与移动观测车经过的时间一致,以探究城市污染来源的不同特征.每次过程释放粒子总数为20000个,排放高度为10~200m.后向模拟输出结果为驻留时间(也称为敏感性系数),单位为s×m3/kg,表示单位质量污染气体在水平格点上的停留时间[15].
前向模拟(LDIRECT=1),所排放的物种总数为2种,粒子释放地点为走航观测的起点徐州地区,释放高度为100~1000m,释放总数为50000个.前向模拟输出结果单位为ng/m3,具体模拟过程、区域以及时间见表2.

表2 FLEXPART模拟时间安排
1.3 计算方法
通过FLEXPART模式输出结果,结合中国区域PM2.5排放源清单,得到潜在源区对长江三角洲地区PM2.5的贡献率.其计算公式为:

猜你喜欢
流程工业(2022年3期)2022-06-23
环境工程技术学报(2022年3期)2022-06-05
学苑创造·A版(2022年5期)2022-05-19
草业科学(2022年1期)2022-03-05
西部资源(2021年1期)2021-11-26
灌溉排水学报(2021年8期)2021-09-02
空间科学学报(2021年6期)2021-03-09
汉字汉语研究(2019年2期)2019-08-27
流行色(2018年11期)2018-03-23
电子制作(2017年7期)2017-06-05