
直升机旋翼转速信号系统阻抗匹配性技术研究
2019-10-08 01:02陈敏
军民两用技术与产品 2019年9期
陈 敏
(中国直升机设计研究所,景德镇 333001)
旋翼系统是直升机最具特色且不可或缺的重要系统,而旋翼转速是直升机在飞行过程中非常重要的参数值,准确实时地指示旋翼转速是飞行员顺利完成各种空中执勤任务的前提。某直升机旋翼转速信号系统采用磁电式旋翼转速磁传感器,该传感器对安装在主旋翼轴上随旋翼同步旋转的音轮进行探测,从而产生一个周期变化的感应电动势,输出正弦波信号,再经变换器处理转换为旋翼转速信号,其中旋翼转速与正弦波信号频率成正比。在设计高频率的电路系统时,高频信号的变化必然会引起阻抗的突变,一旦系统阻抗发生变化,信号就会在突变处产生信号衰减、信号反射、信号失真等信号完整性缺失问题。根据这一特性,本文针对某直升机旋翼转速信号系统在正常额定转速下误报旋翼转速低故障问题,对旋翼转速信号系统的阻抗匹配性进行了分析及改进验证。
1 旋翼转速信号系统
1.1 系统组成
直升机旋翼转速信号系统由两路旋翼转速磁传感器组成,每个传感器有3路输出信号,其中左传感器信号分别供旋翼转速信号处理器、左发动机数字电子控制器、右发动机数字电子控制器使用,右传感器信号分别供旋翼转速指示器、综合数据管理计算机使用。
1.2 工作原理
图1为旋翼转速信号系统的工作原理框图,旋翼转速传感器采取磁电式传感器工作原理,配套音轮进行工作,当音轮转动时,轮齿靠近或远离传感器壳体内的极靴,改变磁阻的大小,使极靴的磁通量呈周期性变化,从而使传感器内的线圈产生感应电动势,输出正弦波电压信号,信号频率与转速变化成线性对应关系。
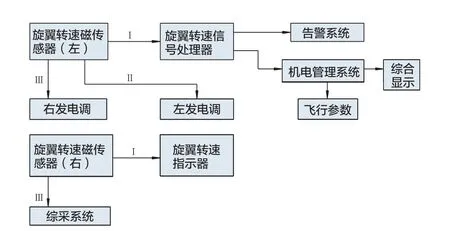
图1 旋翼转速信号系统
旋翼转速指示器采集旋翼转速传感器(左)的输出电压信号,经过输入电路分压、调理后,将近似正弦波信号处理成方波信号传送给CPU处理电路,CPU处理电路对调理后的脉宽信号进行运算处理,输出控制信号来控制步进电机驱动电路,驱动步进电机转动,步进电机旋转带动指针轴及指针在刻度盘上指示出相应的旋翼转速。旋翼转速信号处理器通过采样电阻采集旋翼转速传感器(右)的输出电压信号,经过分压、滤波和限幅等输入电路调理后,将信号送至内部处理单元,对信号的频率进行采集、分析、计算及D/A转换等处理后,向机电管理系统输出直流电压信号以对应显示旋翼转速,在检测到旋翼转速超限后,向告警系统输出旋翼转速高或旋翼转速低接地信号,并提供声光告警。
旋翼转速指示器在产品前端的输入信号采集电路设计原理与旋翼转速信号处理器类似,都是通过分压、采样电阻等来实现对信号的处理及采集,下文选用旋翼转速信号处理器来进行详细的阻抗匹配分析和设计改进验证。
2 阻抗匹配分析
旋翼转速传感器作为信号源,其线圈内阻与输出线路电阻、旋翼转速信号处理器采样电阻在电路上构成串联回路,如图2所示。理论上传感器内阻和线路电阻越小越好,其值越小,对信号造成的分压则越小;而对于信号处理器来说,采样电阻越大越好,其值越大,则取得的信号电压越大。
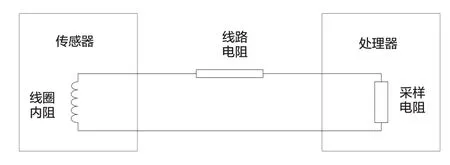
图2 传感器与处理器接口示意图
2.1 信号源阻抗
旋翼转速传感器的输出信号为交流电压信号,在电路中影响交流电压幅值的阻抗特性有阻性、感性、容性3种。其中,传感器线圈是一种感性电阻,根据感抗计算公式XL=2 πfL(f为频率,L为电感),其阻抗特性是频率越高,感抗就越大,则分压就越高。虽然传感器线圈内阻在静态下的测试值为500~1000Ω,但当转速上升到100%,对应的频率为11019Hz时,传感器线圈阻抗在动态下测试为18kΩ左右。
2.2 负载阻抗
旋翼转速信号处理器的输入阻抗在静态下的测试值为12kΩ,对于信号采集电路而言,其输入阻抗在设计时应需远大于信号源输出阻抗,结果表明,处理器的输入阻抗明显偏低,于是导致传感器内阻和线路电阻上的分压过大,而处理器的输入电压则偏小。另外,由于处理器输入电路上并接了滤波电容,而电容是一种容性电阻,根据容抗计算公式XC=1/(2 πfL) (f为频率,C为电容),其阻抗特性是频率越高,容抗就越小,从而导致处理器的输入阻抗在动态测试下会进一步下降,使得处理器采样电阻取得的信号电压更小。
2.3 传输线阻抗
传感器安装于主减平台之上,处理器安装于客舱内,从传感器到处理器的输出线路总长达十余米,由于线路较长,容易在导线上产生寄生电感,从而导致动态下的线路阻抗更大,线路上分压更多。
综合分析上述因素发现,由于传感器输出的是高频信号,其电压幅值受负载阻抗影响较大,并且旋翼转速越快,负载采集端的电压幅值下降就越严重。例如,旋翼转速信号处理器的输入电路设计与旋翼转速磁传感器的输出电路匹配不合理时,会导致信号电压幅值大幅下降,低于产品正常工作的设计边界值,从而造成旋翼转速信号失真。
3 改进及验证
3.1 设计改进
针对旋翼转速信号处理器的输入电路设计与旋翼转速传感器的输出电路匹配不合理的问题,对处理器输入电路进行设计改进。原处理器输入电路图如图3所示,改进后的处理器输入电路图如图4所示。
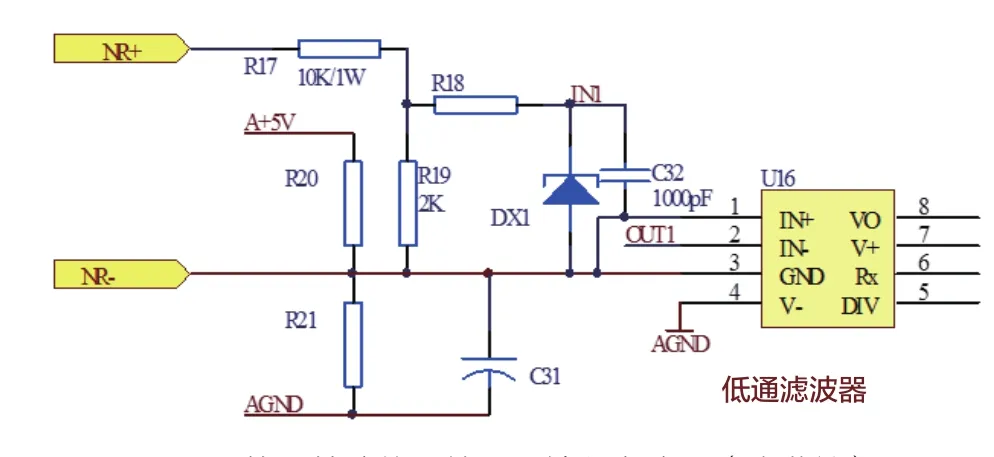
图3 旋翼转速信号处理器输入电路图(改进前)
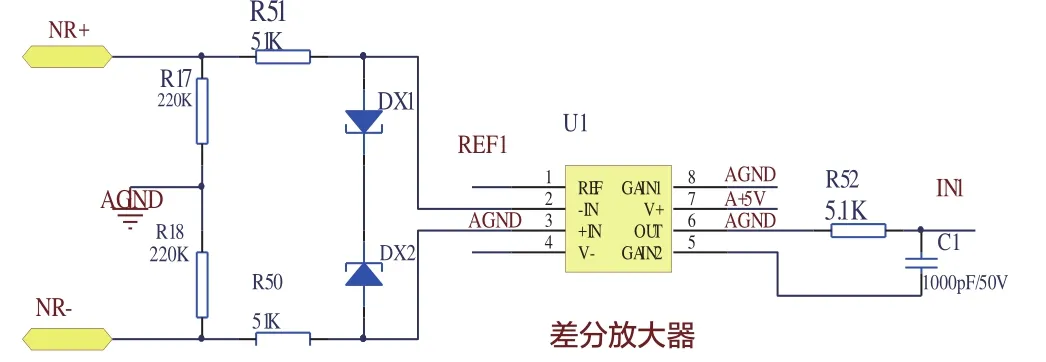
图4 旋翼转速信号处理器输入电路图(改进后)
改进后的处理器输入电路由阻抗匹配电路、限幅电路、差分隔离电路等组成,与改进前的状态相比,主要是增大了输入阻抗。为了不降低原先设计的抗噪声干扰能力,增加了差分放大器对输入信号进行隔离处理,将滤波电容移至差分放大器后级,保证了产品的输入电路无容性阻抗,提高了输入电压,改进后的产品在100%转速下的动态阻抗为440kΩ。
旋翼转速采集设备采集传感器的输出信号,通过分析信号的频率变化得到旋翼转速的变化,信号电压幅值的波动并不会改变设备对信号频率的处理分析功能,但如果设备采集端的信号电压过小,则可能导致设备采集不到有效信号或采集到低幅值的干扰噪声信号,致使设备产生错误的处理分析结果,因此,改变设备的输入阻抗不会影响设备原本的既定功能,只是关系到其取得信号的强弱(即分压的大小)。
3.2 试验验证
为了验证旋翼转速信号处理器设计改进的准确性,对旋翼转速信号处理器进行测试,按直升机实际的接线关系搭建地面运转台模拟试验模型,测试电缆的长度、规格与机上电缆相同,根据电调输入采集电路搭建了两路模拟电调负载。用示波器对旋翼转速信号处理器插头处的输入信号进行监测,改进前后的处理器在运转台的试验结果见表1。

表1 旋翼转速信号处理器地面运转台模拟试验
旋翼转速信号处理器经过地面运转台模拟试验验证后,在直升机上进行装机试飞,试飞结果见表2。改进后的旋翼转速信号处理器的输入信号电压幅值有效提高,能够满足旋翼转速信号处理器正常工作的最低电压设计要求(1.5Vp-p),旋翼转速信号系统指示正常。

表2 旋翼转速信号处理器装机试飞试验
4 结束语
通过提高旋翼转速信号处理器的负载阻抗,有效解决了系统的阻抗匹配性问题。结果表明,该改进后的系统经过地面试验及装机试飞验证,改进方案简单有效,旋翼转速信号稳定,系统可靠性提高。结果表明,该改进方法已实际应用在机上使用旋翼转速传感器输出信号的其他采集设备上,可以作为对使用高频输出信号的负载设备开展阻抗匹配性分析的理论指导依据和处理方法。
猜你喜欢
纺织标准与质量(2022年4期)2022-09-05
汽车维护与修理(2021年24期)2021-12-23
建材发展导向(2021年18期)2021-11-05
北京航空航天大学学报(2021年9期)2021-11-02
小哥白尼(军事科学)(2021年4期)2021-07-28
科学家(2021年24期)2021-04-25
军民两用技术与产品(2021年9期)2021-03-09
名城绘(2019年6期)2019-10-21
电子制作(2019年9期)2019-05-30
电子制作(2019年9期)2019-05-30
