
基于速度扰动观测和模糊PID的视轴稳定控制
2019-10-09 00:45侯宏录
自动化仪表 2019年9期
侯宏录,唐 瑞,王 秀
(西安工业大学光电工程学院,陕西 西安 710021)
0 引言
对于动基座下的载体运动干扰、摩擦力矩干扰和质量不平衡的干扰,一般采用现代控制方法解决视轴的扰动[1-2]问题。目前,已经有多种现代控制理论应用于与视轴稳定控制器,例如自适应比例-积分-微分(proportion-integra-differential,PID)控制器、自适应滑模控制器、神经网络自适应控制器[3-5]。众多研究人员对经典控制理论进行了大量研究,在设定PID参数的过程中,发现PID参数调节的不确定性。由于外界扰动,系统输入的值在范围内变化,此时原本设定的PID参数不一定是最优值。模糊控制算法将输入模糊化,通过设定调整规则,得出模糊输出,最终解模糊得到结果。模糊PID则是将输入值与PID参数联系起来,实时在线调整参数,有较好的控制性能[6-8]。为了获得高稳定精度、快速响应的视轴稳定系统,将模糊PID控制器和基于速度信号扰动观测器(velocity based disturbance obsever,VDOB)相结合。考虑到无人机飞行过程中视轴稳定平台可能受到不同程度的力矩和速度扰动,为了减少扰动对控制精度的影响,采用VDOB来观测扰动,并对其进行一定补偿,使视轴稳定精度也得到了相应提高。通过仿真试验,验证了该方法的有效性。
1 视轴稳定原理与系统结构
无人机光电跟踪平台稳定控制系统组成部分主要包括平台基座和一组由多个框架组成的转动平台。基座与载机固连,平台以吊挂的方式安装在载体之外,伺服控制系统安装在小型电子控制器机箱内。
根据对无人机光电稳定平台的分析,选取了两轴两框架作为稳定平台的基本机构。两轴两框架基本结构如图1所示。
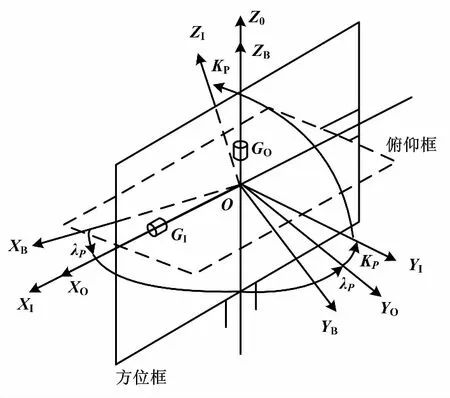
图1 两轴两框架基本结构图
假设三个坐标系共原点,旋转中心位于坐标系原点,无人机载光电稳定平台各坐标系之间的关系如下。
①稳定平台基座坐标系(B):与基座固联,坐标系与机体坐标系重合。
②方位环坐标系(O):与方位环固联,Z轴与B坐标系Z轴重合,方位环绕X轴旋转得到方位角λP。因此当方位角λP=0时,O系与B系重合。
③俯仰环坐标系(I):与俯仰固联,X轴与O坐标系X轴重合,内俯仰绕Z轴旋转得到高低角Kp。当高低角Kp=0时,I系与O系重合。
如果不考虑两轴的耦合作用,则两轴转台的动力学模型为:

(1)
由式(1)即得出电机力矩扰动力矩和角速度、角加速度的关系。在稳定平台上,可通过控制电机的转速来控制平台的角速度,从而实现视轴稳定。
2 视轴稳定控制原理
输入指令和输出差值由稳定控制器的输出控制信号送入功率驱动装置,对信号进行放大和调制,并通过控制电机的转速稳定视轴。视轴稳定回路原理如图2所示。

图2 视轴稳定回路原理图
外界的力矩扰动影响着视轴的稳定,平台框架的陀螺仪将测得的角速率信号送入视轴稳定控制器,位置回路输出的信号和被陀螺敏感到的信号差值作为稳定环的输入值,通过电机控制稳定平台。在稳定平台机械结构中的减振装置用来隔离外界的高频振动扰动,低频扰动通过伺服控制进行隔离。为了进一步隔离扰动,在视轴稳定回路中引入扰动观测器,而在控制算法中进行扰动补偿,改善系统控制性能,提高稳定精度。
3 电机与平台建模
系统中采用的电机为直流力矩电机。直流力矩电机与平台负载等效电路如图 3 所示。
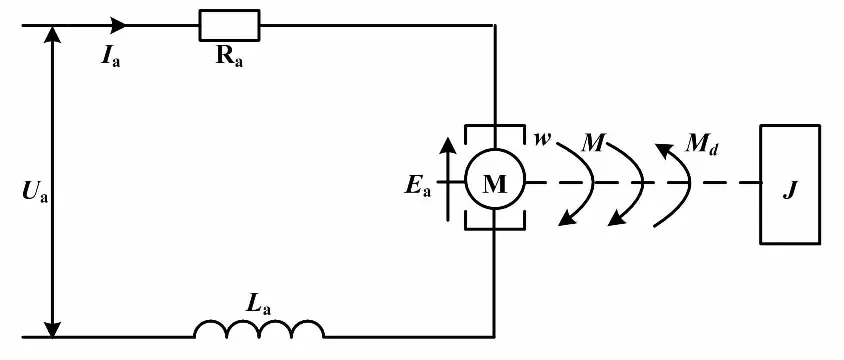
图3 直流力矩电机与平台负载等效电路图
电机选用无刷直流力矩电机。系统采用电压调速,由此可以得到系统的电压平衡和力矩平衡方程为:
(2)
式中:R为电机绕组电阻;L为电机绕组电感;u'为调制电压输入;I为流过电机绕组的电流;E为电机绕组反动势;J为负载转动惯量;M为电机输出力矩;ω为电机转速;Tf(ω)为摩擦力矩,它是转速的非线性函数;b为机械阻尼;Ce和Cm分别为电机的反电势常数和力矩常数。
对式(2)作拉式变换,可以得到式(3)。
(3)
假设扰动力矩为零,由式(3)可以计算出电机的传递函数。
(4)
式中:u'(s) 、M(s)分别为调制电压输入和力矩输出。
本系统设计中,平台总体质量m≤1 kg,旋转半径r≤50 mm,J=0.002 5(kg·m2)。本系统采用J36LWX002型无刷直流力矩电动机,已知电机参数如下:Ce=0.06(v·s/rad),Cm≥0.06(N·m/s),转子转动惯量J=6×10-5(kg·m2),R=17±1.7(Ω),L=4.5±0.5(mH)。由此,可以得到传递函数:
(5)
电机输入信号是位置回路输出的角速率,输出为框架实际角度。
伺服驱动器采用脉宽调制(pulse width modulation,PWM)技术,系统中伺服驱动控制器的功率放大器截止频率远大于电机的截止频率,所以其传递函数可以简化为一个比例环节。即:
GPWM(s)=KPWM=1.5
由电机的传递函数和功率放大电路传递函数,可以得到受控对象的传递函数为:
(6)
4 基于模糊PID和扰动观测器的复合控制器设计
在本文中,视轴稳定控制采用VDOB和模糊PID控制器。
4.1 模糊PID控制器
传统参数固定的PID控制器无法满足高精度控制要求,模糊控制不依赖与对象模型,可利用被控对象的动态输入和输出关系,建立规则,进行合理推理获得输出控制量。模糊PID控制器具有控制精度高、实时性强、鲁棒性好等优点,弥补了PID在高精度控制系统中的缺陷。
4.1.1 PID参数的整定
PID控制器广泛应用于现代工业控制领域, PID控制可以表示如下:
式中:KP为比例参数;Ki为积分参数;Kd为微分参数;u(t)为 PID 控制器的输出;e(t)为控制误差。
由于视轴稳定回路搭载在无人机上,大部分无人机的扰动主频在13 Hz,所以稳定回路的带宽选择在20 Hz以上。PID参数经过整定,最终得出KP=400、Ki=9、Kd=0.003。
4.1.2 模糊推理
模糊PID控制器设计的重点是模糊推理的确定,即确定误差e和误差变化率ec与PID的参数KP、KI、KD的模糊关系。模糊PID控制原理如图4所示。
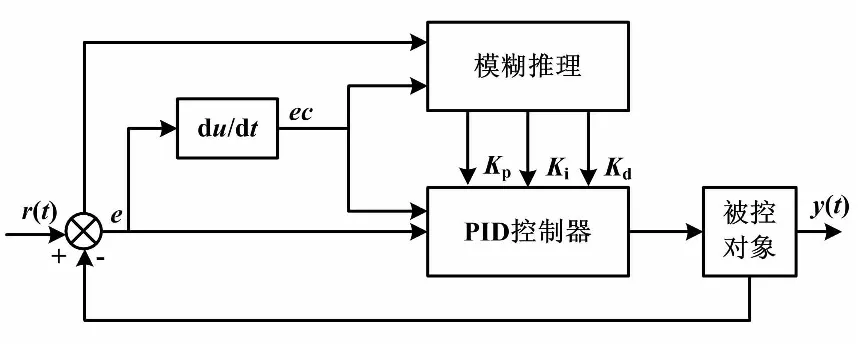
图4 模糊PID控制原理图
将系统误差e和误差变化率ec变化范围定义为模糊集上的论域,e,ec={-3,-2,-1,0,1,2,3},其模糊子集为e,ec={NB,NM,NS,ZO,PS,PM,PB},子集中元素分别代表负大、负中、负小、零、正小、正中、正大。设e,ec和Kp、Ki、Kd均服从正态分布,因此NB 与 PB 的隶属函数选择 Sig-moid 型,其他均采用三角形隶属度函数。
在确定PID参数的模糊控制规则时,需要考虑PID参数对控制性能的影响,并反复检验,以期得到最佳的控制效果。
4.1.3 解模糊
建立模糊规则之后,系统的输出得到模糊化的结果,解模糊得到精确的输出值。本文采用重心法。重心法取隶属度函数曲线与横坐标围成面积的重心作为模糊推理的最终输出值,如式(7)所示。
(7)
将解模糊的结果与初始的PID参数值代入式(8)计算。
(8)
式中:Kp、Ki、Kd为通过模糊控制后的实时PID参数。
将模糊控制与PID结合实现了PID参数的在线整定,使PID满足了实时控制需求。
4.2 基于速度的扰动观测器设计
考虑到负载的变化对系统控制特性的影响,为了增加系统的鲁棒性和快速稳定性,通常需要设计一个外界扰动观测器实现补偿控制[9]。在设计中,从系统可测信息中估计出不可测的扰动而构造一个扰动观测器[10],可以增强对系统偏差的调节,提升系统的抗干扰能力。经典扰动观测器的微分环节存在噪声放大等问题,限制了伺服性能[11-12]。
VDOB及光电稳定平台控制系统原理如图5所示。
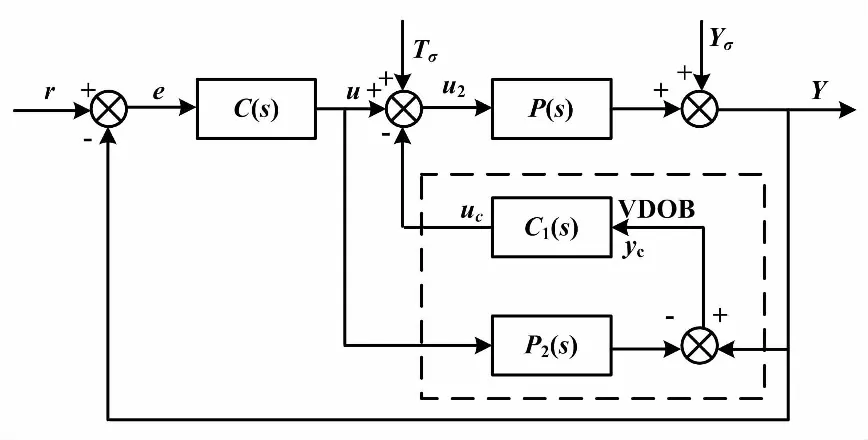
图5 VDOB及光电稳定平台控制系统原理框图
图5中:P(s)为平台真实模型;P1(s)为平台标称模型;C(s)为控制器;C1(s)为补偿器;r为速度参考信号;y为平台速度输出;Td为平台力矩扰动,包括摩擦力矩、线挠力矩、不平衡力矩等;yd为平台载体速度扰动;u为C(s)输出控制量;uc为扰动估计量;ut为平台的实际驱动力矩。
从图5可知,当标称模型正确时,VDOB的数学表达式为:

(9)
同样,未引入VDOB的系统数学表达式为:
(10)
比较式(9)、式(10),可以得出如下结论。
①当标称模型P1(s)与真实模型P(s)完全相同, VDOB与系统的速度输出和系统参考输入无关。这说明控制器C(s)和VDOB的设计是完全独立的。

5 仿真试验
根据受控对象,选取速率误差e的论域为[-0.1,+0.1],ec的论域为[-1,+1]、量化因子为10,Kp的论域设定[0,20]、量化因子为30,Ki为[0,20]、量化因子为2,Kd为[0,3]、量化因子为0.001,采用试凑法的PID参数Kp、Ki、Kd为分别为400、9、0.003。
复合控制仿真如图6所示。
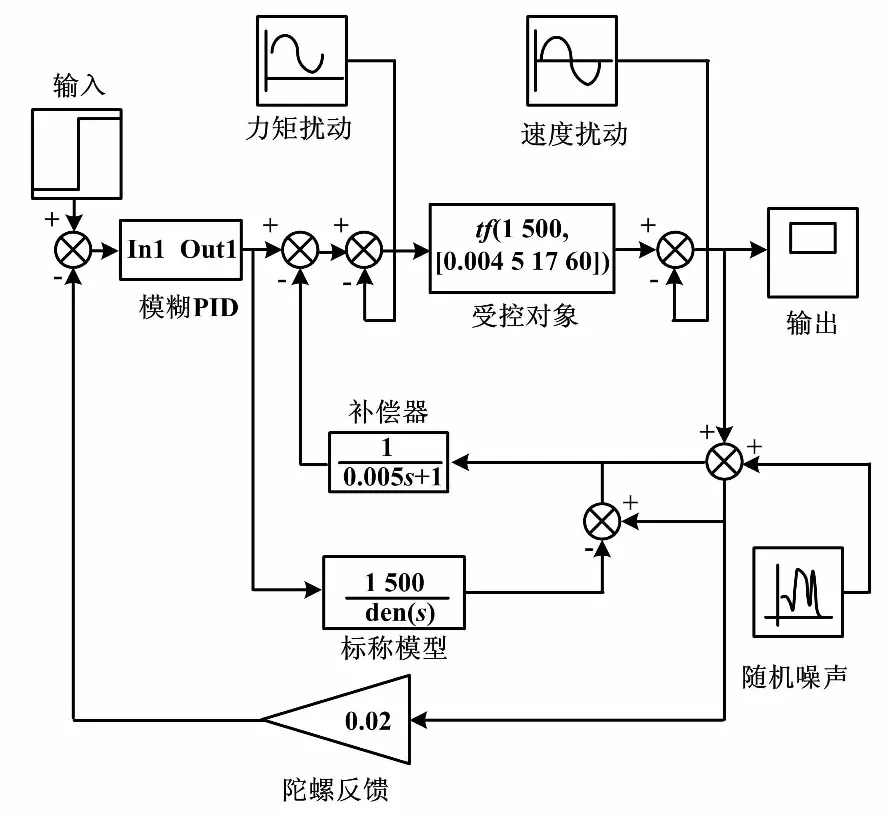
图6 复合控制仿真图
5.1 外界无扰动时的系统仿真试验
当输入幅值1的阶跃信号,外界无扰动的阶跃响应对比如图7所示。
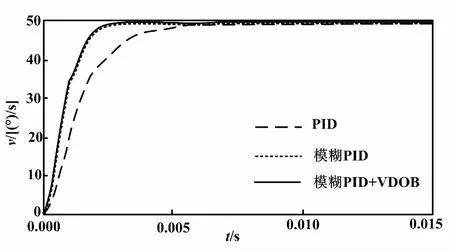
图7 阶跃响应对比图
根据图7可知,模糊PID和VDOB与模糊PID的复合控制的阶跃响应曲线重合。因此,正如理论分析的结果,VDOB不改变系统的输入输出之间的传递关系。由图8得PID上升时间为0.002 8 s,超调量为0,模糊PID上升时间为0.001 6 s,超调量为0.09%。模糊PID和VDOB复合控制与模糊PID的上升时间和超调量相同。模糊PID虽然超调量增加到0.09%,但是上升时间减少了42.9%,提高了系统的动态性能。
5.2 外界扰动为速度扰动时的系统仿真试验
当扰动为yd=3sin(2πt)的速度扰动,也就是1 Hz的速度扰动信号。当速度测量噪声为峰峰值为0.03(°)/s的随机噪声时,速度阶跃响应对比如图8所示。
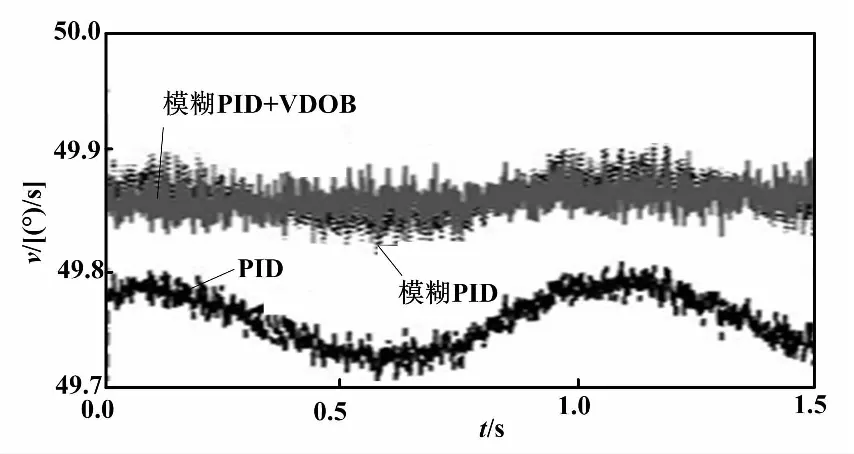
图8 速度扰动阶跃响应对比图
由图8可知,在1 Hz的速度扰动信号下,模糊PID的扰动抑制能力比PID更强。当系统加入VDOB之后,载体速度扰动对平台速度的干扰几乎被完全抑制,曲线主要显示的是速度测量噪声。速度扰动隔离度对比如表1所示。
由表1可知,在1 Hz的速度扰动下,VDOB的加入明显提高了系统的抑制干扰能力,在10 Hz的速度扰动下,VDOB的加入对干扰抑制能力也有一定改善。
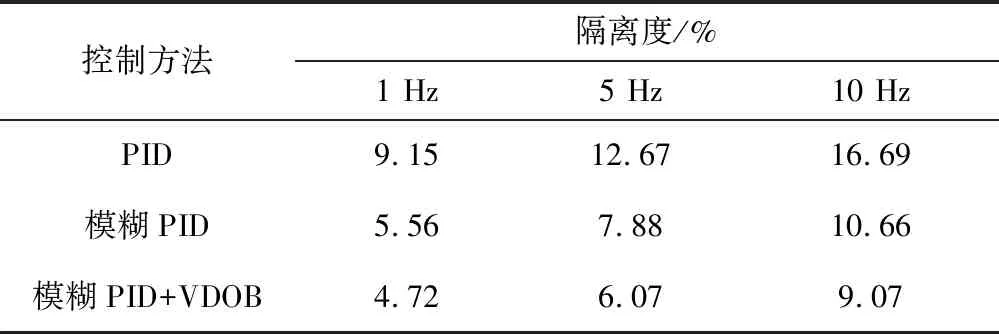
表1 速度扰动隔离度对比表
当扰动为Td=0.3+sin (2πt)Nm、峰峰值为0.03(°)/s的速度测量随机噪声时,系统的力矩扰动阶跃响应对比如图9所示。
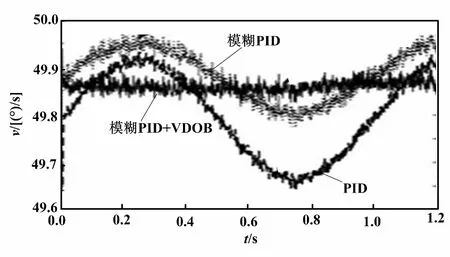
图9 力矩扰动阶跃响应对比图
通过对比图9,当频率为1 Hz、5 Hz、10 Hz的力矩扰动下,系统的隔离度对比如表2所示。
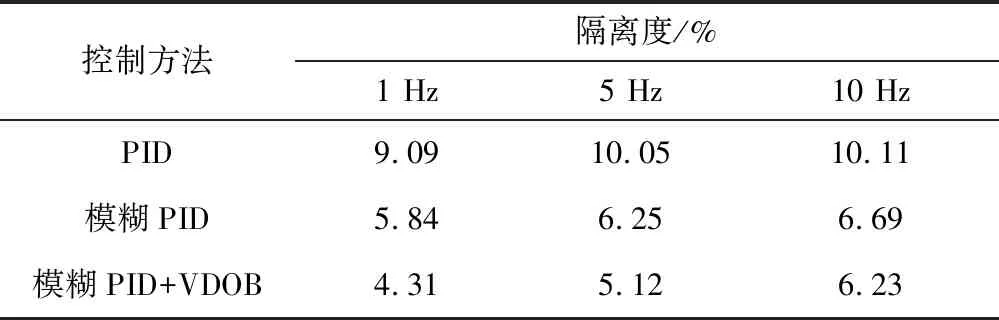
表2 力矩扰动隔离度对比表
表2表明:当扰动为力矩扰动时,扰动为1 Hz、5 Hz时VDOB对系统的隔离效果有较为的改善, 10 Hz的隔离效果也有一定改善。
6 结束语
为了改善光电跟踪系统视轴稳定平台的低频扰动抑制能力,本文将经典的PID的控制器与模糊控制理论相结合,通过模糊控制理论在线整定PID参数,弥补了PID控制在高精度控制系统中的缺陷。为了提高系统的控制精度和稳定精度,将模糊PID作为视轴稳定控制器,结合PID良好的静态性能和模糊控制的动态性能。为了进一步抑制稳定平台可能会受到的力矩扰动,速度扰动,将基于速度信号的扰动观测器与模糊PID控制器相结合,理论分析和数字仿真均证明此方法的有效性。其中,在MATLAB的Simulik工具箱中进行的仿真试验表明,在1 Hz的力矩扰动下,加入VDOB的稳定回路的隔离度为4.31 %,明显小于未加入VDOB回路的5.84%;在1 Hz的速度扰动下,加入VDOB的稳定回路的隔离度为5.56%,小于未加入VDOB回路的4.72%。在10 Hz的速度和力矩扰动下,加入VDOB系统对扰动的隔离能力并无明显提升。通过分析表1、表2可以得出,模糊控制器对高频低频信号都有着较好的抑制能力,与VDOB相结合后的复合控制则进一步加强了系统对低频信号的抑制能力,提高了视轴稳定回路的控制性能以及扰动抑制能力。
猜你喜欢
中国特种设备安全(2022年2期)2022-07-08
北京航空航天大学学报(2021年7期)2021-08-13
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
空间科学学报(2020年6期)2020-07-21
中国惯性技术学报(2019年3期)2019-10-15
中国惯性技术学报(2019年6期)2019-03-04
北京航空航天大学学报(2017年6期)2017-11-23
山东青年(2016年12期)2017-03-02
电子制作(2017年24期)2017-02-02
