基于卡尔曼滤波模型的多传感器数据融合导航定位建模与仿真
2019-10-14 02:08宋之卉赵彦晓
数字通信世界 2019年9期
宋之卉,赵彦晓
(北京信息科技大学信息与通信工程学院,北京 100124)
随着多传感器技术的不断发展,可利用的与导航定位相关的位置传感器越来越多,标识着同一个物理信息的数据源也呈多样化。在导航与定位技术领域,位置标识数据源可以包括全球导航卫星数据、视觉传感数据、惯性传感器数据等,仅仅凭借独立传感器检测到的信息已不能实现定位的要求。为不断提升导航定位精度,为用户提供多维度的导航定位结果,是决定着导航与定位性能的关键环节,具有较大的研究价值和应用潜力。
本论文基于导航定位仿真平台,通过采集用户的GNSS 接收机、视觉、惯性导航等传感器的位置数据,将这些信息输入卡尔曼滤波器进行信息的预处理,剔除掉错误和粗差信息,再根据最优加权融合估计算法对这些数据进行有效融合,为用户提供多维度的导航定位结果。
1 导航定位仿真平台的结构
本仿真系统框图如图1所示,包含以下模块:传感器用户位置数据采集模块、卡尔曼滤波与数据预处理模块、数据融合算法模块,结果图形化显示及性能分析模块。其中传感器用户位置数据仿真模块包含GNSS 接收机、视觉传感器以及惯性导航三类位置传感器,首先通过设置样本数量、数据范围及精度,随机传感器仿真数据,然后采用卡尔曼滤波模型对仿真数据进行预处理,然后进行三路传感器仿真数据滤波后的融合,最后输出数据融合结果、仿真结果图形化显示以及对各传感器定位性能进行评估。
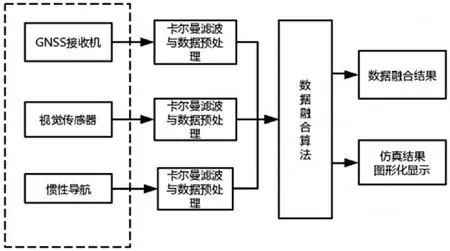
图1 导航定位系统仿真平台结构
2 数据预处理流程
传感器数据与预处理流程如图2所示,首先通过GNSS 接收机、视觉传感器以及惯性导航对用户位置信息进行仿真,通过设定数据误差范围及精度,给定高斯白噪声,随机生成三组仿真数据,然后通过卡尔曼滤波模型进行数据预处理,引入相对误差和均方根误差对预处理数据置信度和精确度进行检验,剔除错误和粗差数据,生成更为精确可信的传感器仿真数据。
3 卡尔曼滤波数学模型
采用卡尔曼滤波器进行估计可以实现线性系统下的方案最优,GNSS 接收机、视觉传感器以及惯性导航三组传感器可以近似等效为线性特性。其滤波过程如图3所示。
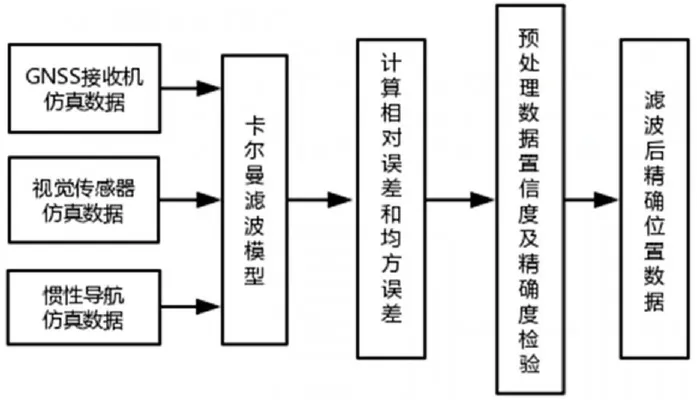
图2 传感器数据与预处理流程

图3 卡尔曼滤波过程图
卡尔曼滤波主要包括预测与更新两个过程。预测当前状态时主要依据系统前一状态与控制量来进行估计。更新确定总体预测值可信还是传感器测量的数据更可信。通常情况下滤波器根据预测的当前状态与更新之后的测量估计,给出较精确地数据信息。在工作过程中始终对当前状态进行重复更新。
假设线性系统状态是k,预测时依据的表达式为

状态更新时依据的表达式为

4 数据融合算法
数据融合采用最优加权融合估计算法,如式(6),合并来自三个不同位置传感器的滤波及预处理后的仿真数据,以提供给用户更为精确的导航定位信息,由于各个传感器精度不一样,为了达到更好的融合结果,通过给定随机噪声,根据不同传感器设定权值,以达到最优的融合结果。

5 仿真分析
采用matlab 软件对三组传感器仿真数据经卡尔曼滤波模型预处理,加入相对误差和均方根误差进行置信度和精确度检验以及卡尔曼滤波仿真和数据融合结果进行了仿真,结果如下:
5.1 数据预处理前后误差对比
数据预处理通过卡尔曼滤波模型进行,加入相对误差和均方根误差对滤波前后置信度和精确度进行比较和分析。
图4、5、6分别是GNSS 接收机、视觉传感器以及惯性导航传感器仿真数据经卡尔曼滤波前后,通过计算相对误差和均方根误差,进行预测值与真实值和滤波值与真实值的误差对比。综合这三个结果对比分析,可以看出,经卡尔曼滤波加入均方根误差进行数据预处理后,得到的仿真数据误差相比如滤波前测量值误差明显减小,分别在0.01、0.005误差范围大小附近上下浮动,数据精度明显提升,拟合效果好,满足设计要求。
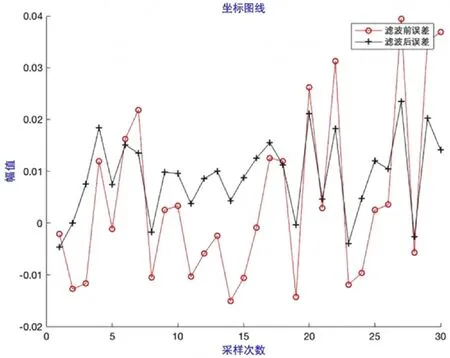
图4 GNSS接收机滤波前后误差对比图
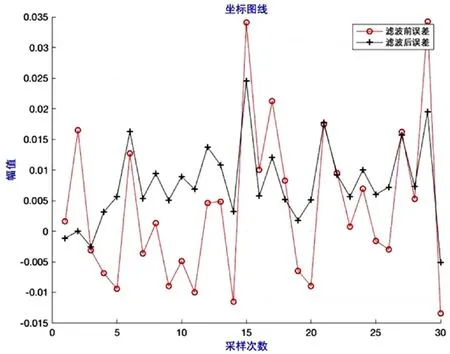
图5 视觉传感器滤波前后误差对比图
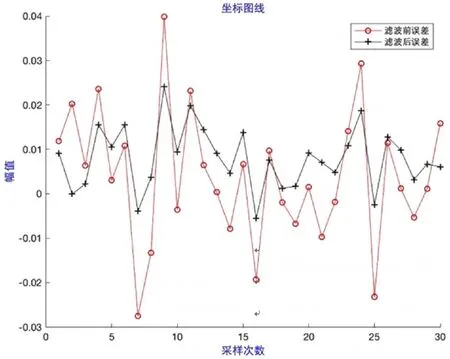
图6 惯性导航滤波前后误差对比图
5.2 卡尔曼滤波仿真分析
通过多传感器数据仿真及建模仿真系统,采用卡尔曼滤波模型进行滤波得到三组位置传感器仿真数据结果如下。
图7、8、9分别是GNSS 接收机、视觉传感器以及惯性导航传感器经卡尔曼滤波模型进行滤波后,真实值、预测值以及滤波值比较。综合这三个仿真结果对比分析,无论是哪一类型的位置传感器,经卡尔曼滤波后的值,都和真实值更为接近,且真实值和测量值都集中在固定区域,分别集中在0.069-0.07之间,说明滤波效果明显提高了精度。
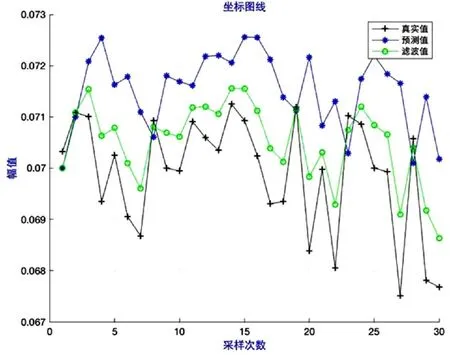
图7 GNSS接收机卡尔曼滤波仿真结果
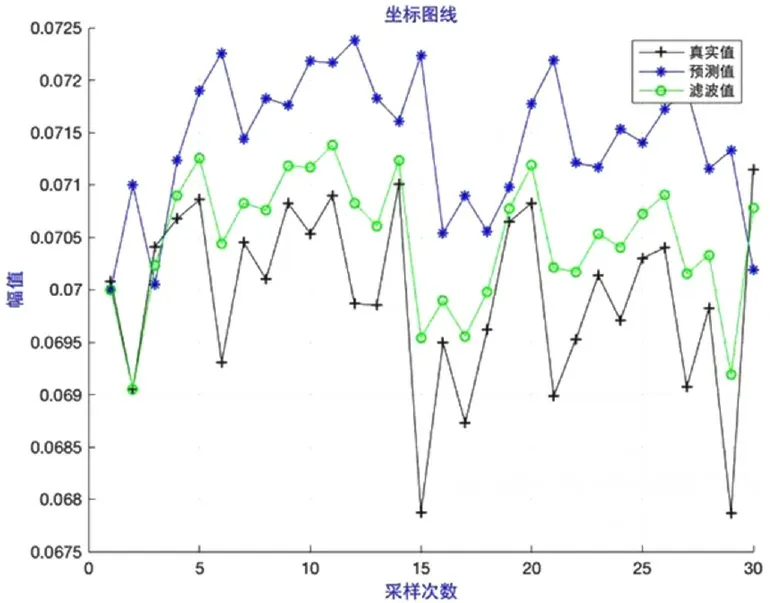
图8 视觉传感器卡尔曼滤波仿真结果
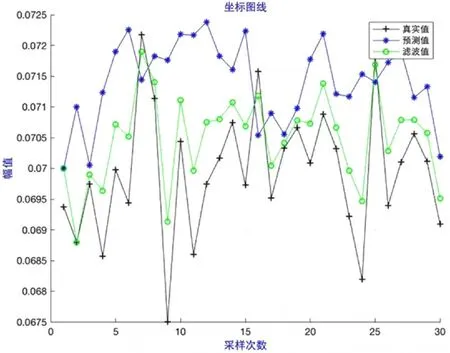
图9 惯性导航卡尔曼滤波仿真结果
5.3 最优加权融合估计算法数据融合结果
最后,对三组位置传感器经卡尔曼滤波后的仿真数据进行数据融合,采用最优加权融合估计算法,合并来自三个不同位置传感器的滤波及预处理后的仿真数据,以提供给用户更为精确的导航定位信息。由于各个传感器精度不一样,为了达到更好的融合结果,通过给定随机噪声,根据不同传感器设定权值,得到最优加权融合估计算法融合后结果如图10所示。
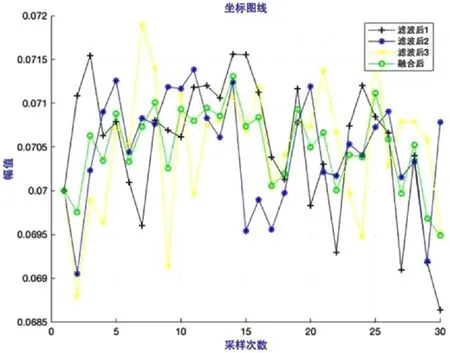
图10 三组传感器滤波融合结果图
仿真数据融合结果如表1所示:

表1 三种传感器仿真数据融合结果
将融合结果与各个单传感器滤波值相比较,得到的数据融合结果精度高于任一单独位置传感器定位精度,与真实值误差相比有明显改善,达到了多传感器位置信息融合提高导航定位精度的目的。另外,通过卡尔曼滤波前、后,计算相对误差和均方根误差,进行预测值与真实值、滤波值与真实值的对比以及单一传感器卡尔曼滤波仿真分析,通过多传感器数据融合结果与单一位置传感器滤波值比较,可以看出,利用信息融合结果实现的对位置传感器定位性能评价的精度较高,且是正确有效的,达到了预期设计效果。
6 结束语
本文采用卡尔曼滤波模型对三种位置传感器仿真用户位置数据进行预处理,通过计算相对误差和均方根误差,进行仿真分析,对滤波前后预测值与真实值误差和滤波值与真实值误差进行比较,从而对数据预处理置信度和精确度加以分析。通过卡尔曼滤波图形化显示仿真结果,对各单一传感器仿真数据真实值、预测值和滤波值做了比较和仿真分析。最后对三组传感器仿真数据滤波值,采用最优加权融合估计算法进行数据融合,并进行了仿真分析,结果表明采用卡尔曼滤波算法和最优加权融合估计算法后,预处理数据置信度和数据精度得到明显提高,融合处理结果优于单源处理结果,导航定位精度得到提高,能更好地为用户提供多维度的导航定位结果,同时,本文的研究成果也对环境数据预测和评估做支撑,具有现实意义。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
温州大学学报(自然科学版)(2022年2期)2022-05-30
潍坊学院学报(2020年2期)2021-01-18
飞天(2019年6期)2019-07-08
电子制作(2019年23期)2019-02-23
北京航空航天大学学报(2017年9期)2017-12-18
制导与引信(2017年3期)2017-11-02
中国惯性技术学报(2017年1期)2017-06-09
自动化学报(2017年2期)2017-04-04
新高考·高二数学(2015年2期)2015-05-27