
列车全自动驾驶模式下的车站站台门健康状态监控系统研究
2019-10-14 06:04罗小华
城市轨道交通研究 2019年9期
汪 琴 罗小华
(1.武汉科技大学城市学院,430083,武汉;2.中铁第四勘察设计院集团有限公司,430063,武汉//第一作者,讲师)
城市轨道交通车站的站台门一旦发生故障,会直接影响列车运行,造成乘客滞留,也可能直接伤人,甚至导致乘客在危急情况下无法逃生。
在全自动驾驶模式下,列车的正常运营维护对站台门的健康状态提出了更高的要求[2]。现有的站台门可以监测其运行过程中的电机电流、开关门时间及开关门速度等参数。由于这些参数极易受到站台门外部环境的影响而产生异常波动,故很难根据这些参数来判断站台门的故障。而且,站台门数量多,如靠人工定期检修,则工作量过大,不易操作[3]。全自动驾驶模式下,必须提高系统的可靠性,则必须改变站台门被动的事后维修状态。因此,建立全自动驾驶模式下站台门健康状态监控系统具有较大的研究价值。
1 全自动驾驶模式下的站台门健康监测内容
站台门系统由机械部分(门体结构和门机系统)和电气部分(电源系统和控制系统)组成,对其机械部分尚无有效的监控方法。本文将基于系统论,从站台门运行的内外部整体环境出发,分析全自动驾驶模式下辨识站台门健康状态的影响因素和表征参数,以便对其布设实时监测点。
1.1 站台门门体结构的监测内容
地下车站站台门的门体由承重结构、滑动门、固定门、应急门及顶箱等组成。站台门的承重结构包括顶部支撑、伸缩装置、立柱、门槛、底部支撑等,要承受站台门自重等竖向荷载,列车行驶活塞风压、环控系统风机风压及乘客挤压荷载等水平荷载,以及地震荷载。这些荷载具有较大的随机性和突发性,且荷载值变动范围大。站台门门体结构在复杂的受力状态下,受行车密度、环境温湿度的影响[4],容易产生位移和变形,进而直接影响滑动门的开启,甚至影响其他设备的使用寿命。
由此可知,对站台门门体结构而言,需要对风压、乘客挤压荷载、行车密度、温度、湿度、振动、位移和变形等参数实施监测[5]。
1.2 站台门门机系统的监测内容
站台门门机系统包括门机梁、电机、减速器、传动装置和锁紧装置等(如图1所示)。对门机系统,需要对滑动门开关门时间、开关门速度曲线、电流及电压[6]等参数实施监测。

图1 站台门门机系统示意图
2 站台门健康状态监控系统架构
根据全自动驾驶的需求,建立站台门健康状态监控系统架构如图2所示。

图2 站台门健康状态监控系统架构图
全自动驾驶模式下,站台门健康状态监控系统由数据层、应用层和用户层组成。
数据层主要包括监测资料数据库、设计资料数据库和维修资料数据库。由压力传感器、温湿度传感器、位移传感器及变形传感器等收集的实时监测数据,通过无线传输网络进行传输。站台门健康状态监测系统对监测数据进行整理、去噪后,分类存放至监测资料数据库中。设计资料数据库存放了设计资料、设计图纸及设计规范等数据,且可根据设计变更随时更新。维修资料数据库存放了站台门的故障诊断信息、故障历史信息、维修历史信息及维修方案信息等数据。
应用层首先进行站台门健康状态判断,对比监测数据和对应的设计值,判断监测数据超限与否:如监测数据超限或接近限值,则进行预警,待排除故障后,再重新收集监测数据对站台门的健康状态进行判断和预测;如监测数据未超限,站台门健康状态良好,则应用层将进行健康状态预测工作。站台门健康状态判断还没有比较明确的数学模型,需要对监测数据进行深入学习,并进行系统辨识,再结合有限元分析模型的计算结果,对站台门健康状态的发展趋势进行预测。最后,应用层根据预测结果,制定站台门的维修方案,并综合考虑安全性和经济性,进行多方案比选,选择最优的实施方案[7]。
用户层主要功能是三维显示站台门的健康状态,并显示实时监测点的数据正常与否,自动生成报表,可供使用人员随时进行维修历史和维修状态查询,也可辅助管理人员进行站台门的维修调度。
站台门健康状态监控系统网络结构见图3。

图3 站台门健康状态监控系统网络结构图
首先,现场采集到的数据通过CAN总线传输至信息集控单元;然后,采用GPRS(通用分组无线服务技术)进行远程传输。远程服务端实时扫描传输过来的数据,通过解码地址,分别获取各传感器的数据,从而获取站台门各状态的信息。
3 站台门健康状态智能监控关键技术
3.1 基于光纤光栅的站台门健康监测技术
站台门的主要监测点传感器布置如图4所示。在站台门的轨道侧和站台侧安装的压力传感器,可监测站台门所受风压和人群挤压力大小;在站台板及轨顶风道底梁安装的位移传感器,可监测站台门的变形;在最靠近站台门限界处安装的位移传感器,可实时监测站台门的侵限情况(图4)。

图4 监测点传感器布置示意图
由于地铁中存在电磁及振动等干扰,因此传感器需选用抗干扰、环境适应性强的类型。本系统采用光纤光栅传感器进行监测,其工作原理如图5所示。
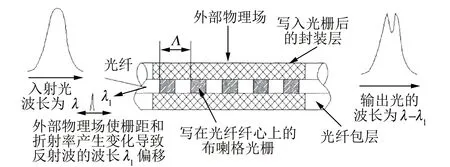
图5 光纤光栅监测土建沉降原理
当波长为λ的入射光进入光纤光栅传感器[8-9]时,光栅会反射波长为λ1的窄光。当光栅受到外部物理场(如应力、应变、温度等)的作用时,其栅距Λ会发生变化,从而改变反射光λ1的波长。因而根据λ1的偏移量就可确定待测部位物理量的变化。
经过光纤传输的光信号振幅为
E=E0cos(ωt+φ)
(1)
式中:
E0——光纤中传输光波的振幅;
ω——光波频率;
φ——光波初相角。
当站台门所受风压发生变化时,或者站台门发生沉降时,会引起式(1)中传输光光波的某个参数随之发生变化。对已经调制的光信号进行解调,就可获得所监测物理量的变化。
3.2 基于系统辨识和有限元分析的站台门健康状态预测技术
站台门的门机系统是站台门运行关键的驱动设备,由于门体结构受力状态复杂,门机系统的电机和传动装置会承受动态变化的工作负荷,相应的电流电压值很不稳定。在工作负荷过大的情况下,站台门健康状态监控系统可根据电流值及电压值直接判断出设备的故障状态,但在通常情况下却无法从不稳定的电流值及电压值来判断设备的健康状态,故很难做到预知故障、提前维修。所以,需深度挖掘门机系统与门体结构之间的相关关系,挖掘所有监测对象与站台门健康状态之间的映射关系,从而对站台门的健康状态进行预测。
本文采用系统辨识技术和有限元分析相结合的方法建立站台门健康状态预测模型(如图6所示)。将实时监测的数据、维修历史及设计文件等数据资料作为预测模型输入层,采用降维、去噪信平滑等方法对数据进行处理。隐藏层为预测模型的关键层,包含基于深度学习的系统辨识技术和有限元分析模型。隐藏层通过深度学习整理后的监测数据[10-11]来建立站台门健康状态与各参数之间的相关关系模型;结合站台门的有限元分析模型(见图7),对关系模型进行修正;利用系统辨识的结果对有限元分析模型中的参数进行识别,使其更接近站台门实际受力状态,从而得到更合理的分析结果。输出层采用循环网络的方式,基于系统辨识结果和有限元分析结果,对站台门的经济寿命及故障情况进行预测,进而为相关人员制定维修方案提供依据。
4 结语
全自动驾驶模式需要一个站台门健康状态监控系统,对站台门的运行状态进行主动监测和控制。本文首先对站台门健康监测对象进行分析,根据全自动驾驶的需求,建立站台门健康状态监控系统架构,基于光纤光栅技术实施站台门健康监测,基于系统辨识技术和有限元分析模型建立站台门健康状态预测模型。相关人员可根据预测结果制定检修计划,综合考虑设备的经济寿命,进而比选出最佳的检修方案。该系统已通过理论验证,目前正处于实际试验阶段,尚有部分性能需进一步完善。从现有的试验效果来看,该系统能有效提高站台门运行监管效率,对推进全自动驾驶模式的应用有重要意义。

图6 站台门健康状态预测模型

图7 站台门的有限元分析模型
猜你喜欢
快乐语文(2021年15期)2021-06-15
童话世界(2020年13期)2020-06-15
铁道通信信号(2019年11期)2019-05-21
故事大王(2019年4期)2019-05-14
城市轨道交通(2019年2期)2019-04-04
铁道通信信号(2019年2期)2019-03-26
西部广播电视(2015年17期)2016-01-18
中国交通信息化(2015年1期)2015-06-05
振动工程学报(2015年1期)2015-03-01
全球定位系统(2015年4期)2015-02-28
