
第13届全运会优秀男子撑竿跳高运动员助跑阶段的运动学研究
2019-10-18 05:58王涛宋广林
山东体育学院学报 2019年4期
王涛 宋广林
摘 要:运用现场拍摄、运动录像解析、数理统计等研究方法,以13届全国运动会男子撑竿跳高进入决赛的5名运动员(成绩在5.30 m及以上)的技术特点为研究对象,对运动员持竿助跑过程中的步长、步速、撑竿倾角、摆动幅度(左右)进行生物力学解析,探讨现阶段我国男子撑竿跳高运动员助跑阶段的技术特征,揭示持竿助跑的节奏和规律,为更好地促进撑竿跳高技术的发展提供科学依据。
关键词:全运会;撑竿跳高;助跑;技术分析
中图分类号:G823.2 文献标识码:A文章编号:1006-2076(2019)04-0094-06
Abstract:With field shooting, sports video analysis, mathematical statistics and other research methods, the technical characteristics of 5 male pole vaulters (with scores of 5.30 m or above) who entered the finals of the 13th National Games were studied.The biomechanical analysis is carried out on the step length,step speed,pole angle and swing range (left and right) of the athletes. It discusses the technical characteristics of Chinese male pole vaulters in the run-up stage, and reveals the rhythm and rule of pole holding run-up, so as to provide scientific basis for promoting the development of pole vaulting technology.
Key words:National Games;pole vaulting;run-up;technical analysis
撐竿跳高“人-竿”协同的技术原理要求在撑竿跳高完整技术动作的过程中,“人”和“竿”在时间和空间位置上做到协调一致和统一运动,持竿助跑阶段最主要的任务就是在保证顺利插竿起跳的同时尽可能多地获得更多的能量,为了达到此目需要良好地发挥“人-竿”系统的整体性,以便形成稳定的助跑,在达到最大可控速度后以良好的步态衔接完成插竿起跳动作。
近年来我国男子撑竿跳高出现以薛长锐、丁邦超、姚捷等为代表性的运动员不断刷新全国纪录,但由于撑竿跳高完整技术动作本身特点,横向距离较长、纵向空间距离较大,国内对该项目研究较少。本研究以第13届全运会中我国优秀男子撑竿跳高运动员的技术特点为研究对象,反映现阶段我国男子撑竿跳高运动特点与技术水平,填充该项目科学研究数据,对现阶段各运动员的技术诊断与今后的训练等都具有重要参考价值。
1 研究对象与方法
1.1 研究对象
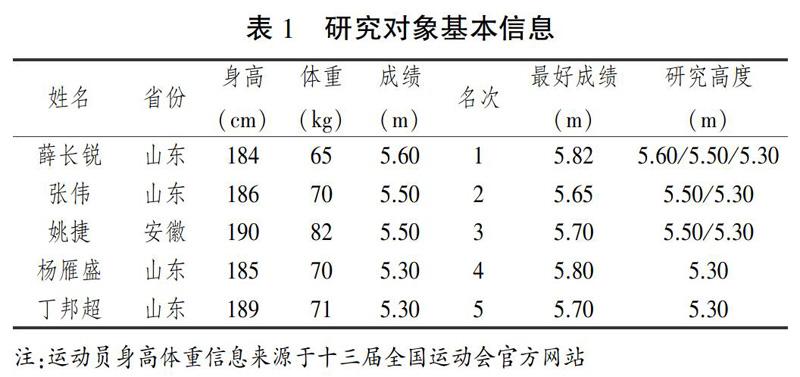
本研究以2017年9月7日在天津举行的中华人民共和国第13届全国运动会(以下简称13届全运会)男子撑竿跳高进入决赛的前5名运动员(成绩在5.30m及以上)的技术特点为研究对象,以5名运动员助跑阶段的技术参数为研究内容。
1.2 研究方法
1.2.1 文献资料法
本研究以“撑竿跳高”“助跑”“技术分析”为关键词,通过国家图书馆、中国知网、山东师范大学图书馆、国际田联官方网站、中国田径协会查阅有关数据、书籍及文献,检索文献时间段为2007年—2017年,总共收集相关中文文献17篇;以“Pole vault”为英文关键词通过EBSCO等检索工具收集外文文献12篇,以其中8篇为主要参考,进而获得与本研究相关的各项理论依据及信息。
1.2.2 运动生物力学拍摄测量法
1.2.2.1 影片拍摄
本研究使用4台同型号JVC摄像机(型号为GC-PX100)进行拍摄,摄像机拍摄频率为50 Hz,在13届全运会男子撑竿跳高决赛前,以资格赛进行预先拍摄,从而达到了预实验的目的。决赛时对进入决赛的12名运动员进行现场拍摄,起拍高度为5.30 m,最终拍摄数据保留下前5名运动员的全部比赛现场视频。
采用定点视频拍摄(如图1),1、2、3号机位机身固定,其中1号机位于起跳点附近,主光轴垂直于运动平面,用于拍摄运动员倒四步至起跳完成的完整过程;2号机位于1号机右侧,主光轴与运动平面垂直,用于拍摄运动员倒四步到倒九步助跑过程;3号机正对于助跑道前行方向,主光轴落在助跑道的中线与运动平面平行;4号机位于1、2号机之间,扫描运动员助跑起跳全部过程。
1.2.2.2 录像解析
视频图像解析采用北京体育大学开发的视讯录像分析,解析频率为50 Hz,对所得的数据通过数字滤波进行平滑处理,截断频率10 Hz,得到原始数据。
比例尺设置:以运动员助跑的行进方向标定为X轴正值,以与地面垂直向上为Y轴建立坐标轴,比赛结束后在助跑道内进行标尺拍摄,侧面(1、2号机)比例尺标尺横杆与地面及摄像画面平行,竖竿垂直于地面,标定位置分别为0 m(穴斗后沿)、2 m、4 m、6 m、8 m、10 m,3号机比例尺标尺横杆水平方向与摄像平面平行,竖竿垂直于地面,以穴斗后沿为基点2 m为单位在助跑道内标定得到行进比例尺标定个数为15个,得到横纵向长度比例标尺。
1.2.3 数理统计法
运用Spss19数据统计软件对原始数据进行统计学分析。
2 结果与分析
在持竿助跑的过程中,运动员通过合理的步幅节奏,在控制好撑竿的情况下,达到自身的最大可控速度完成起跳动作[1]。随着撑竿的不断降落,前翻力矩所产生的力逐渐增大,迫使运动员必须采用保持身体直立、加快步频及高抬腿的身体形式,形成一种“追竿”的跑动方式来降低由于撑竿下降而产生的对速度的影响,具体特征如下。
2.1 步长特征
在本研究中,5名运动员的全程助跑的平均步数为17.2步,研究数据显示,在全程助跑过程中运动员的步长节奏大致可分为三个阶段:步长增大期(1~4)、步长稳定期(5~12)、步长调节期(13~17)。现有的文献中对步长特征的研究主要集中在对倒数三步的研究,本研究对现阶段我国男子撑竿跳高运动员倒数三步步长及步长差值的研究数据如表2所示。
我国优秀男子撑竿跳高运动员倒数三步的步长节奏呈现步长逐渐减小的趋势,倒数三步步长差值总体呈现“大-小”模式,与世界优秀撑竿跳高运动员相一致,这表明在最后两步的助跑中,运动员均采用了减小步幅从而加快步频的方式,符合撑竿跳高的助跑的技术特征和要求。最后几步的助跑步幅节奏对起跳时水平速度的保持和损失有着重要的影响,谢慧松[3]和张军霞[4]等的研究均指出,世界优秀运动员助跑的最后两步步长规律为,倒二步长于倒一步,差值为10~20 cm,表2中①为前世界纪录保持者布勃卡在意大利塞斯特列雷6.14 m时的步长数据。但从步长缩短的幅度来看,只有薛长锐(5.30 m)张伟(5.50 m)与杨雁盛(5.30 m)三跳较为合理,总体缩短幅度较小。
从数据反映的情况来看,我国男子撑竿跳高运动员在助跑的最后两步的衔接存在相同的问题,在合理调整和控制倒二步的步幅方面有待于改善和提高。但步长的变化幅度与运动员的助跑支撑以及身体重心的保持有着密切的关系,步幅差值小也是运动员积极起跳的一种体现,没有因为临近起跳点而采取的刻意技术动作变化,同时运动员的步长与其本身的身体形态有重要的关系。这种数据差异与运动员比赛时的竞技状态有关,也会随着时间与环境的变化而发生改变。
2.2 步速特征
为起跳后能够良好地进行悬垂摆体、拉转推杆以及后续动作,撑竿跳高运动员必须在助跑过程中达到身体最大可控速度的情况下获得最大的动能。理论层面上来说,抛出其他因素的影响,运动员水平速度越大成绩就越好[5]。谢慧松等人的研究显示,撑竿跳高成绩与助跑过程中的水平速度相关系数r=0.72[6](P<0.05),这说明较高的水平速度是获得较大动能的基础,同时也是创造优异成绩的必要条件[7]。
前期平稳的助跑如何保持并逐渐加速至自身最大可控速度直至完成稳定的起跳是助跑过程的关键。我国优秀男子撑竿跳高的助跑步数为18±2步,从助跑至起跳完成整体表现为加速状态(如图3),加速助跑与起跳之间的衔接,其中以最后三步的助跑速度变化最为关键,倒一步的速度变化率最为突出。本研究的数据显示,我国优秀男子撑竿跳高运动员最后三步助跑的水平速度表现为逐渐增加,助跑平均速度与世界优秀运动员差距不大,资料显示布勃卡在跳过6.14 m时倒一步水平速度为9.77 m/s,倒二步水平速度为9.64 m/s,从这一指标来看,我国运动员最后三步助跑平均速度与世界优秀运动员(9.39±0.32 m/s)[2,8]相差并不明显,但最后两步各步平均速度与其相差较大,这说明我国运动员在助跑最后三步助跑中对于最后两步的减少步长加快步频积极蹬地的能力有待于提高与改进。但从个案的角度来看,薛长锐最后三步助跑平均速度最高可达9.68 m/s,与世界优秀运动员助跑水平齐平,倒一步平均速度高达10.
26 m/s,从该数据反映的指标来看该名运动员的助跑速度保持能力已位于撑竿跳高项目的世界前列。
步速差值方面,良好的步态衔接的直接表现就是两步之间的步速差值,在起跳前形成高速、稳定的步速是顺利起跳的必要条件,因此在助跑最后阶段理应不出现较大的步速波动。世界优秀运动员倒四步速度平均差值为0.117±0.112 m/s[9],我国优秀运动员平均差值为0.210±0.017 m/s,从数值的角度看,整体差值幅度较大,平均差值约为世界优秀运动员两倍,薛长锐、丁邦超两名运动员差值幅度较为合理,张伟、姚捷、杨雁盛三名运动员倒数两步的速度起伏较大。因此助跑的速度也并非越快越好,过度注重速度的提升势必会影响到插竿起跳的效果,良好的步态衔接必须建立在速度逐渐增大并保持稳定的基础之上,我国运动员在以后的训练中应在发展运动员最大可控速度的同时注意最后三步的节奏控制。
2.3 持竿助跑中撑竿倾角的变化特征
持竿助跑中的撑竿倾角:在持竿助跑过程中运动员持竿与界定水平面之间的夹角。本研究界定所有与水平面之间的夹角,水平面之上为正值,水平面之下为负值,以运动员每一步落地瞬间时撑竿的状态测量角度(图4)。
从助跑起动方式来看,本研究的研究对象均以静止-身体前倾(撑竿倾角61.72°±2.65°)-起动的方式来摆脱静止状态,随着步频的逐渐加快撑竿倾角也逐渐降低。葛蕴等的研究曾指出,助跑的速度、步频也并非越快越好,只有在运动员可控的速度之内配合良好的降竿节奏,才能达到较好的起跳效果[10]。表4数据显示,运动员的降竿幅度随着步频的加快而增大,且步频越快降竿幅度也越大,同时撑竿在降低过程中产生前翻的拉力增大运动员前进的动力,促使步频的增加。整体数据指标来看(图5)运动员在倒三步之前基本处于平稳期,即助跑速度稳步增大同时伴随撑竿的平稳降落,进入倒三步后,伴随高速的助跑运动员进行举竿与插竿,从折线图的趋势可以明显看出,我国优秀男子撑竿跳高运动员均在最后两步完成,其中最大降竿幅度为丁邦超22.7°(5.30 m)。在高速的助跑环境下,降竿幅度越大,技术难度越大,这就要求运动员控制高速的持竿助跑速度与平稳并且较小的降竿幅度。姚捷、楊雁盛两名运动员的相比世界优秀运动员最后两步撑竿的平均降竿幅度(18.67°±4.135°[2])较小,分别为16°、16.2°,薛长锐最后两步降竿幅度平均为18.95°、从数据上看与世界运动员基本持平,而张伟与丁邦超两名运动员最后两步平均降竿幅度较大,分别为20.68°、22°。
从本研究的数据来看,我国运动员持竿助跑最后两步降竿幅度整体偏高,与世界优秀运动员相比,只有薛长锐一名运动员与世界优秀运动员持平,这表明在持竿助跑训练过程中,除了要保证较高的助跑速度之外,还要对降竿的节奏与速度增加的配合加以控制。持竿助跑过程中运动员在增大速度的同时还要合理地控制撑竿带来的前翻动力,达到最大可控速度的同时要配合撑竿的快速降落,从而产生较好的起跳效果。
2.4 持竿助跑撑竿摆幅特征
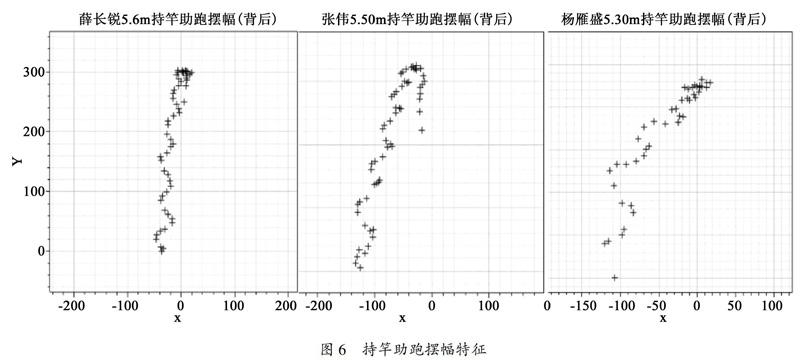
撑竿摆幅:运动员在持竿助跑过程中撑竿左右摆动的距离。本研究通过对3号机收集的视频信息进行处理,以助跑区跑道中轴线为基础线定位Y轴,以与助跑区跑道垂直的水平线为X轴建立坐标系,以0.04秒为一个单位进行摆动幅度撑竿标志标定,以赛后场地比例尺拍摄中3号机特定比例尺进行数据分析标定,截取行进比例尺15个(图6)。
撑竿跳高“人-竿”协同的技术原理要求在撑竿跳高完整技术动作的过程中,“人”和“竿”在时间和空间位置上做到协调一致和统一运动,从而以良好的动作方式和相互控制达到最佳的运动效果[11]。持竿助跑则是“人-竿”系统获得起跳后动能的前提和保证,在此阶段最主要的任务就是在保证顺利插竿起跳的同时尽可能多地获得更多的能量,为了达到此目的需良好地发挥“人-竿”的协同作用。
在助跑过程中由于撑竿的降落及摆动会产生不同方向的翻转力矩,理论上讲若撑竿的前进方向(背后观测)为直线或与运动员的前进轨迹相吻合,则撑竿的正常下降产生向前的前翻力矩,促进运动员助跑速度的增加,即通常所称之为(追竿跑);但在实际的助跑加速过程中由于运动员的助跑轨迹并非直线而且摆臂势必会产生向前后及左右的撑竿摆动,从而产生摆动幅度,左右摆动幅度越大,产生的侧翻力就越大,不利于助跑节奏的控制和水平速度的增加,影响助跑结束后插竿起跳的效果。因此在助跑时手持撑竿并在逐渐加速的过程中使撑竿平稳降落,要求运动员在提高助跑速度的同时控制撑竿的摆动及变化特征。
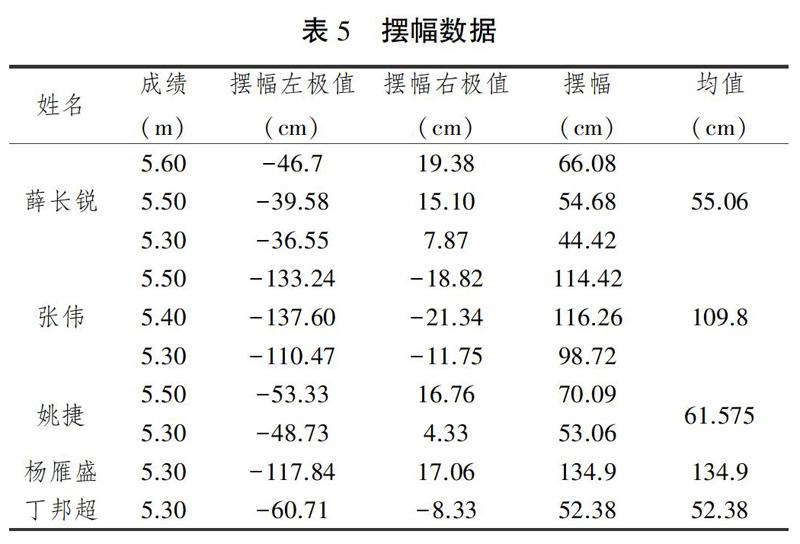
本研究数据显示,我国优秀男子撑竿跳高运动员持竿助跑摆幅个体差距较大,其中薛長锐与丁邦超摆幅较小,均值分别为55.06 cm、52.38 cm,这表明两名运动员在助跑过程中对撑竿的控制较为稳定,由于撑竿的摆动对助跑的影响相对较小;相比之下张伟与杨雁盛的摆动幅度较大,达到了1 m以上,杨雁盛的撑竿上头运动轨迹已经越过了助跑区的跑道宽度,如此较大的摆动幅度,分析其原因有以下方面:第一,助跑时对撑竿的控制较差;第二,持竿助跑加速过程不稳定,导致“人-竿”系统遭到破坏,人竿速度分离使摆动幅度增大;第三,撑竿磅数较小则弹性小韧性不稳定,持竿助跑过程中撑竿本身的摆动幅度大;第四,比赛竞技状态因素的影响。
通过观察研究对象技术数据与慢动作下视频对比还发现,成功过杆的前提是稳定且有节奏的持竿助跑。以运动员个案分析,助跑时的摆动幅度随起跳高度的升高而增大,因此持竿助跑撑竿的摆动幅度与比赛环境及运动员临场的心理也有重要的相关性。
3 结论
3.1 合理的步长调节期应为随步频与速度增大而步长逐渐减小,减小比例均匀且适中。现今我国优秀男子撑竿跳高运动员助跑阶段的倒数两步步长差值总体呈现“大-小”模式,步长比例整体态势与世界优秀运动员有较大差距。
3.2 全程助跑的水平速度表现为逐渐增加状态,薛长锐倒一步平均速度为10.26 m/s,高于现阶段世界优秀运动员数据水平,但我国运动员总体步速起伏较大,不利于形成良好的起跳动作。
3.3 全程助跑降竿幅度随着步频的加快而增大,且步频越快降竿幅度也越大,前14±2步助跑中降竿幅度较为合理,最后两步降竿幅度整体偏高,只有薛长锐一名运动员与世界优秀运动员相持平。
3.4 持竿助跑过程中撑竿摆动幅度个体差距较大,良好的跑动、摆臂节奏有利于持竿助跑节奏的控制和助跑速度的保持。
参考文献:
[1]Falk Schade,Juha Isolehto,Adamantios Arampatzis,et al.Biomechanical analysis of pole vault at the 2005 IAAF World Championships in Athletics[J].New Study in Athletics,2007,22(2):29-45.
[2]许占鸣,林松,等.“人-竿”协同视角下世界优秀男子撑竿跳高运动员技术特征[J].沈阳体育学院学报,2017,36(1):76.
[3]谢慧松,周铁民,等.中外高水平女子撑竿跳高选手助跑及起跳阶段技术特征研究[J].北京体育大学学报,2009,32(10):101-104.
[4]张军霞,刘生杰.我国优秀女子撑竿跳高运动员助跑及起跳技术的运动学研究[J].成都体育学院学报,2009,35(11):78.
[5]李晓峰.杨雁盛撑竿跳助跑起跳技术的运动学分析[J].成都体育学院学报,2011,37(6):56.
[6]谢慧松,周铁民,等.中外高水平女子撑竿跳高选手助跑及起跳阶段技术特征研究[J].北京体育大学学报,2009,32(10):101-104.
[7]Adamczewski,H.Perlt,B.Run-up velocities of female and male pole vaulting and some technical aspects of women,s pole vault [J].New Study in Athletics ,2012,30(11):1075-1083.
[8]Falk Schade,Arampatzis,Bruggemann,et al.Comparison of the men,s and the women,s pole vault at the 2000 Sydney Olympics Games[J].J Sports Sci,2004(22):835-842.
[9]王鹏,王继艳,等.我国优秀男子撑竿跳高运动员助跑起跳技术的运动学研究[J].中国体育科技,2011,47(6):21.
[10]葛蕴,沈兆喆.高水平撑竿跳高运动员专项速度训练模式研究[J].山东体育学院学报,2010,26(7):61-62.
[11]Kyoo-Jeong Choi,Kyung-Ok Yi,Nam-Hee Kim.Kinematic Analyses of Men,s Pole Vault in IAAF World Championships,Daegu 2011[J].Korean Journal of Sport Biomechanics,2011,21(5):551-560.
猜你喜欢
全体育(2017年7期)2017-12-25
全体育(2017年8期)2017-12-25
健康管理(2017年8期)2017-12-01
环球时报(2017-09-09)2017-09-09
电脑知识与技术(2016年26期)2016-11-24
体育时空(2016年9期)2016-11-10
体育时空(2016年9期)2016-11-10
中国新通信(2016年16期)2016-10-18
科学与财富(2016年28期)2016-10-14
