
基于耦合系统环境振动试验的结构和TMD参数识别
2019-10-19 01:42华旭刚王修勇陈政清孙洪鑫
振动与冲击 2019年10期
温 青,华旭刚,王修勇,陈政清,孙洪鑫
(1.湖南科技大学 结构抗风与振动控制湖南省重点实验室,湖南 湘潭 411201;2.湖南大学 风工程与桥梁工程湖南省重点实验室,长沙 410082)
调谐质量阻尼器(Tuned Mass Damper,TMD)是一种构造简单、实用可靠的被动耗能减振装置。该装置已经在工程结构减振控制中广泛应用,如高耸结构振动控制[1-2]、大跨桥梁风致振动控制[3-5],大跨人行桥或楼板人致振动减振[6-9]。TMD减振设计首先需要准确评估结构模态参数,结构模态参数评估误差和TMD系统自身参数偏离均会导致TMD减振效率的降低[10]。准确识别结构被控模态参数和TMD自身参数是提高TMD减振效率的关键。
当结构和TMD相互独立时,结构模态参数和TMD动力参数均可通过环境振动测试、自由振动测试和强迫振动测试评估。环境振动测试结合自由振动测试识别结构的模态频率、模态振型和阻尼比已经在工程实践中广泛应用[11-12]。TMD动力参数主要通过自由振动测试。强迫振动试验能识别包括模态质量在内的动力参数,但是该方法需要专门的激振设备,土木工程领域中仅适用于中小型结构和中小型TMD[13-14]。在结构上安装TMD后,结构和TMD组成一个耦合的振动系统。然而,上述传统的参数识别方法只能评估耦合系统的动力特征[15],不能通过耦合系统的响应识别结构被控模态参数和TMD物理参数,而这些参数是TMD现场调试和后期维护的必需参数。TMD现场调试和后期维护是保证TMD减振效率的重要手段。性能优良的TMD启动加速度很小,在很小的环境荷载作用下,就能发挥作用,发生结构和TMD的耦合振动。
鉴于此,本文提出了一种通过测试结构和TMD耦合系统的环境振动响应,识别结构被控模态参数和TMD物理参数方法。本文首先详细阐述了参数识别方法的理论背景;然后,通过数值仿真,分析了该方法的可行性和适用性;最后,通过单层框架结构和TMD耦合系统的试验,验证了该方法的有效性。
1 理论背景
1.1 结构和TMD耦合系统状态空间模型
如图 1所示的N自由度线性结构和TMD构成的耦合振动系统,其运动方程可以表示为
(1)
式中:M,C和K分别为结构的质量、阻尼和刚度矩阵;mo,ko和co为TMD的质量、刚度和阻尼;X为结构的位移向量;xn为结构的第n个自由度的位移;xo为TMD的位移;G为激振力作用位置矩阵;u为激振力向量;[δn]为TMD的位置向量,除第n个为1外,其余均为零的列向量。
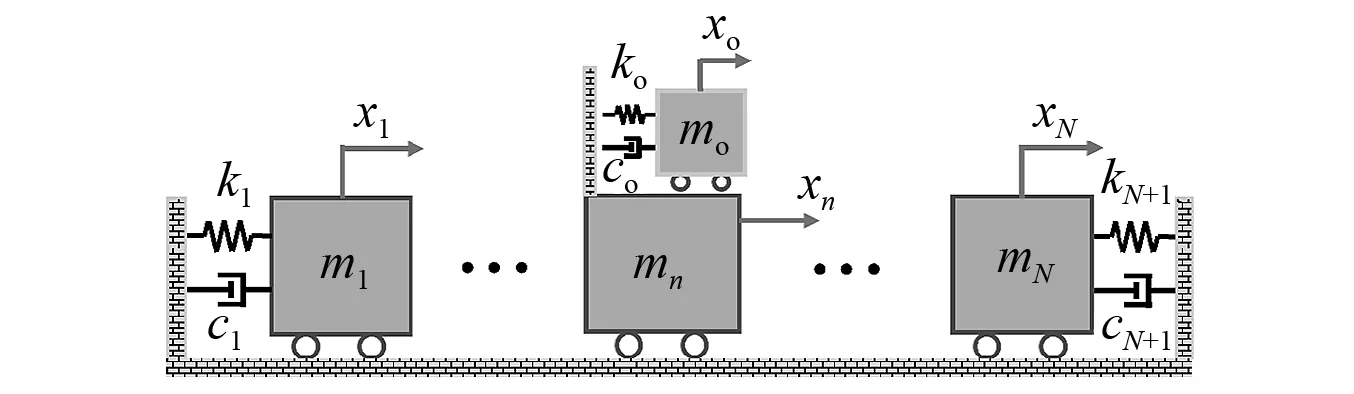
图1 结构-TMD耦合振动系统Fig.1 Structure-TMD coupled vibration system
当结构阻尼为瑞利阻尼时,可以利用模态叠加法解耦结构运动方程。令
X=Φq
(2)
式中:Φ为模态振型矩阵;q为模态坐标向量。将式(2)代入式(1),并对式(1)中第一式左乘φrT,化简可得

(3)
式中:qr为第r阶模态坐标;r为模态阶次,mr=φrTMφr为结构的第r阶模态质量;ζr=φrTCφr/(2ωrmr)为结构的第r阶阻尼比;ωr和φr分别为结构第r阶模态的频率和振型;ωo和ζo分别为TMD圆频率和阻尼比。

在式(3)中,xn和xo均为位移;而qr为模态坐标,因此,需将qr转化为位移才能进一步化简公式。假设xn=φnrqr,即结构第n个自由度位置的位移仅有第r阶模态参与振动,于是式(2)可转化为
(4)
式(4)是被控结构的第r阶模态和TMD耦合的振动系统,其状态空间方程可以表示为
(5)

(6)
(7)

AC特征值分解可表示为
(8)
式中:V为复特征值对角矩阵;Ψ为复特征向量矩阵,Γ为耦合系统振型矩阵;*为共轭符号;Λ为由非共轭特征值λi构成的对角矩阵,即Λ=diag(λi),i=1,2。λi可以表示为
(9)

(10)
1.2 系统识别
基于状态空间模型的系统辨别方法能识别系统的状态空间模型,如ARMA(Autoregressive Moving Average)方法、系统特征实现法[16]和子空间法[17]。随机子空间法(Stochastic Subspace Identification,SSI)是一种基于线性系统离散状态空间方程的时域识别方法,该方法被认为是目前最有效的方法。因此,本文采用随机子空间法评估结构和TMD耦合振动系统的状态空间模型。
在实际测试中,信号的采集都是在离散的时间点上,因此,连续状态空间模型不符合实际工程情况,须采用离散状态空间模型。在环境激励作用下,考虑必然存在的不确定误差和测试噪声干扰,离散的状态空间模型可以写为
yk+1=ADyk+BDuk+wk
ηk=CDyk+DDuk+vk
(11)
式中:yk=[xn(k),xo(k),xn(k+1),xo(k+1)];yk+1=[xn(k+1),xo(k+1),xn(k+2),xo(k+2)];ηk为观测向量;AD为离散状态矩阵;BD为离散输入矩阵;CD为离散输出矩阵,DD为离散传递矩阵;wk为处理过程和建模误差引起的噪声;vk为测量噪声;k为第k个离散时刻。在环境振动测试中,环境激励是无法测量的随机激励,与wk和vk对状态空间模型的影响基本相似。因此,将式(11)中的BDuk合并入wk中,DDuk合并入vk中。于是式(11)可以简化为
yk+1=ADyk+wk
ηk=CDyk+vk
(12)
采用随机子空间法可以求得式(12)的离线状态空间模型,获得AD和CD矩阵。对评估的AD进行特征值分解,得
AD=UZU-1
(13)

(14)

(15)
根据CD和U可得耦合系统的模态振型Θ
Θ=CDU
(16)

(17)
式中:Λe和Γe为随机子空间法识别的能够反映式(10)确定的耦合系统特征的对角矩阵和振型矩阵。
1.3 参数识别

(18)
(19)

2 仿真研究
2.1 单自由度结构
单自由结构和TMD耦合振动系统,如图 2所示。结构的质量m1、刚度k1和阻尼c1分别为50 kg,1 973.92 N/m,3.14 N·s/m,由此计算得到结构的固有频率f1和阻尼比ζ1分别为1.00 Hz和0.5%。按照最大位移最小化设计TMD最优参数,假设设计质量比μ为1%,则TMD的频率f0=f1/(1+μ)=0.990 Hz,TMD的最优阻尼比ζ0=[3μ/8(1+μ)]1/2=6.09%。由此得TMD的质量m0、刚度k0和阻尼c0分别为0.5 kg,19.35 N/m和0.19 N·s/m。

图2 单自由度结构-TMD耦合系统图示Fig.2 Structure-TMD coupled vibration system

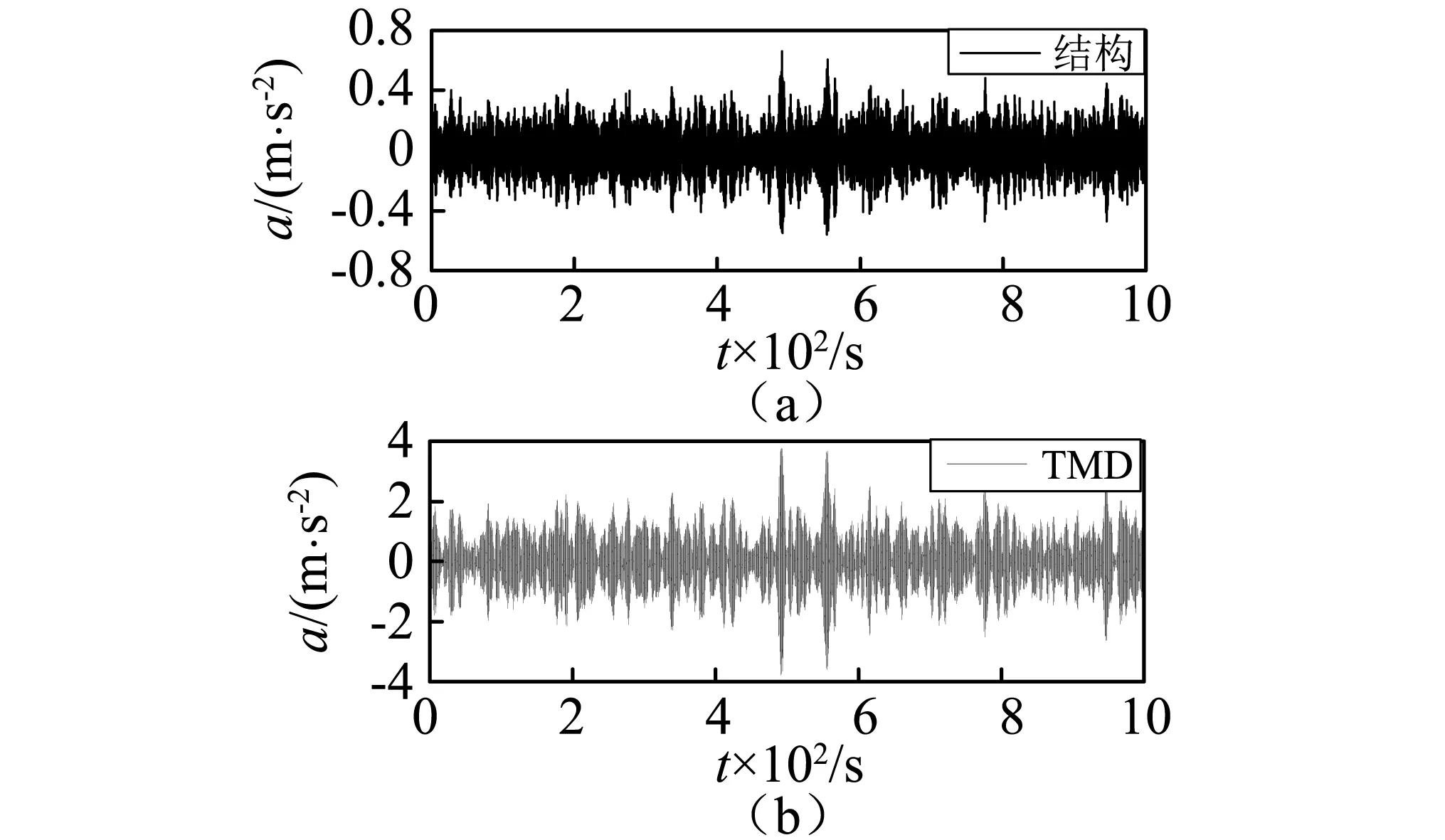
图3 环境激励下结构和TMD加速度响应Fig.3 Acceleration responses of structure and TMD for ambient vibration
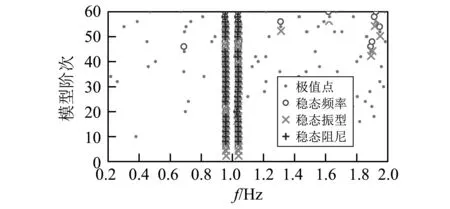
图4 SSI法稳态图Fig.4 The stabilization diagraph for SSI
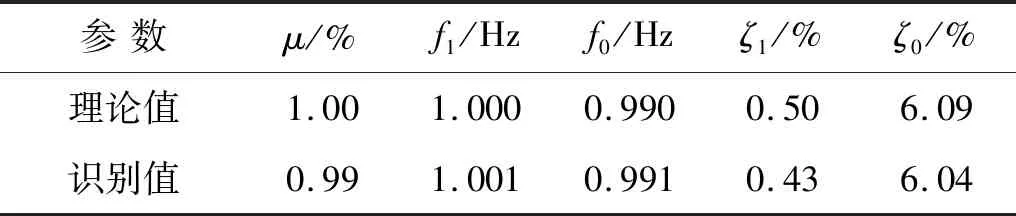
表1 识别的结构和TMD的固有模态参数Tab.1 Estimated nature modal parameters of structure and TMD
2.2 多自由度结构
三自由度结构-TMD耦合系统如图 5所示,结构的物理参数为:m1=50 kg,m2=m3= 40 kg,ki=2 000 N/m,ci=2.0(N·s/m),i=1,2,3。三自由度结构的模态特性如表 2所示。为了抑制结构的第一阶模态振动,在质量块m2上安装一个TMD,质量比μ为1%,即m0= 0.683 kg,TMD的固有频率f0和阻尼比ζ0分别为0.826 Hz和6.09%。结构和TMD构成一个四自由度的耦合振动系统。
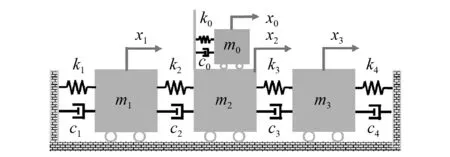
图5 3自由度结构-TMD耦合系统图示Fig.5 3DOFs structure-oscillator coupled vibration system

表2 3自由度结构模态参数Tab.2 Modal parameters of the 3 DOF structure

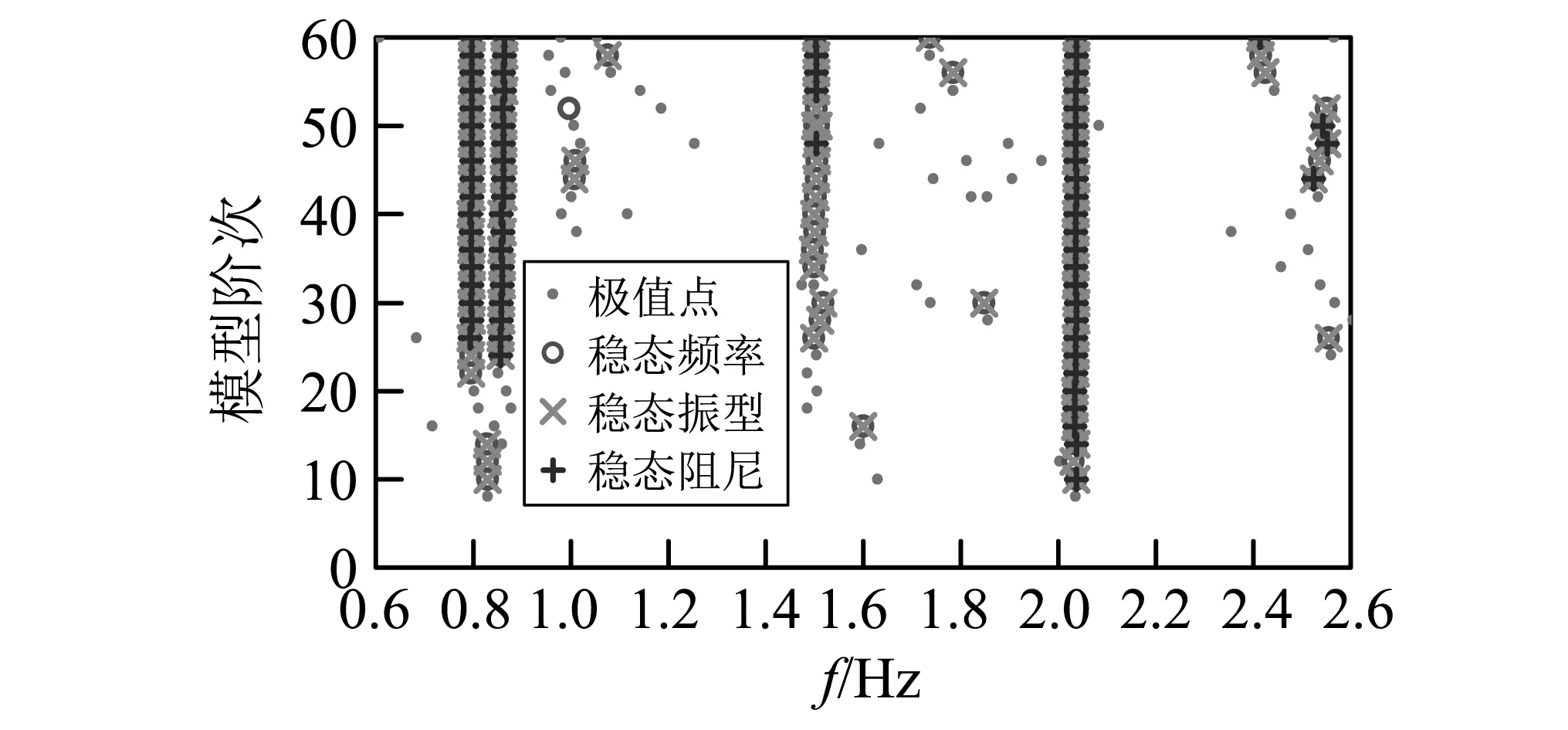
图6 环境振动稳态图Fig.6 The stabilization diagraph for ambient vibration
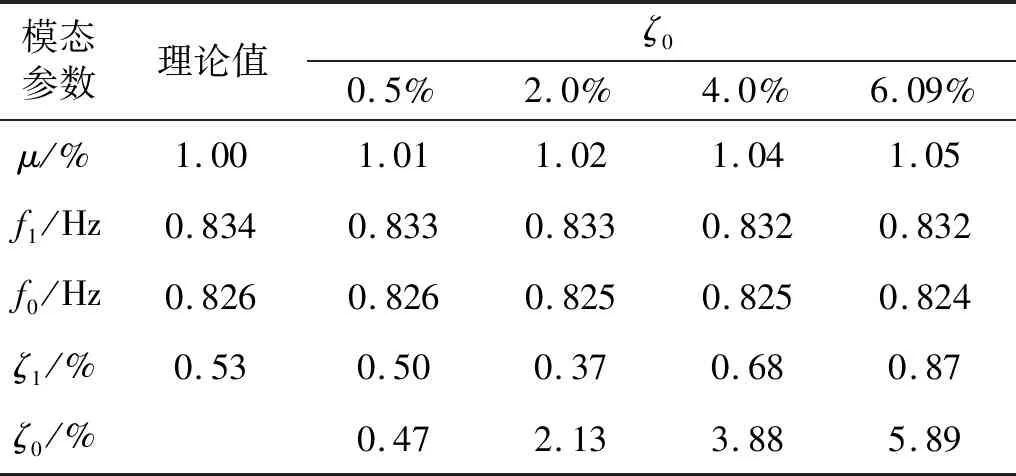
表3 识别的结构和TMD的参数Tab.3 Estimate parameters of structure and TMD
3 单层框架试验研究
为了验证本文提出的方法,在实验室进行了单层框架结构-TMD耦合振动系统试验研究。单层框架结构由两根钢板立柱、一块钢板平台和基础组成,立柱与平台和基础固结。TMD采用悬臂梁结构,如图 8所示。悬臂梁一端固结在底座上,另一端固定一个集中质量块。为了能够调节TMD的阻尼,设计了电涡流阻尼装置。
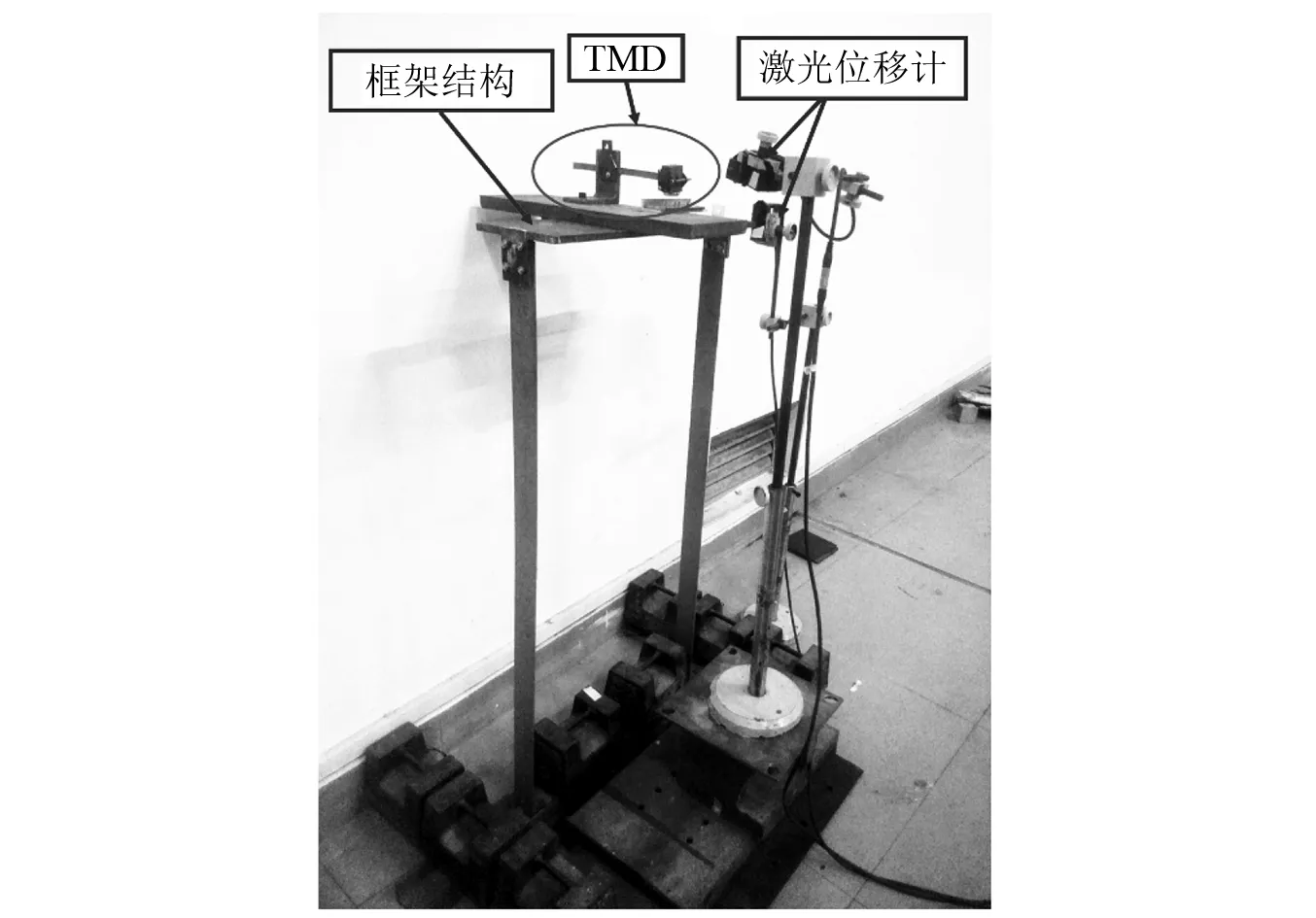
图7 结构-TMD耦合振动系统图Fig.7 Prototype of the structure-TMD coupled vibration system
通过在结构平台上增加质量块调整结构的质量,通过改变铜板和永磁体的距离调整TMD的阻尼比,试验了两种质量比和三种TMD阻尼比共六个工况。采用理论方法计算了结构的模态质量,1#结构和2#结构的模态质量分别约为17.90 kg和27.90 kg。TMD运动质量通过称重直接获得,约为0.19 kg。由此可得质量比分别为1.06%和0.68%。为了获得结构和TMD的动力特征,分离结构和TMD,通过单独测试TMD和结构的自由振动,采用曲线拟合方法识别了不同工况下TMD和结构的频率和阻尼比,如表 4所示。
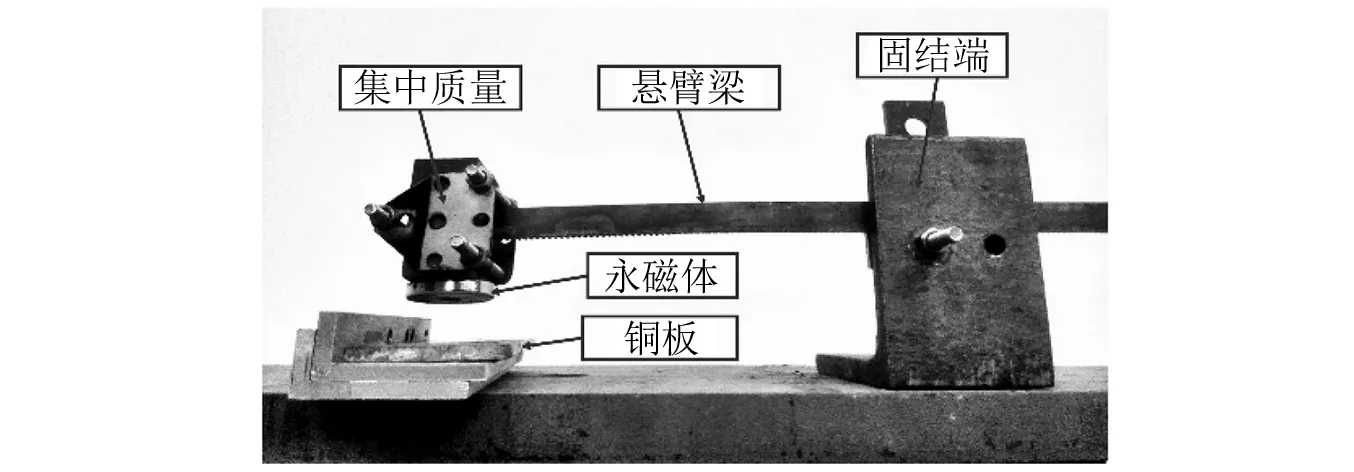
图8 TMD和电涡流阻尼原件图Fig.8 Prototype of TMD and eddy current damping element
由于试验室过于安静,不足以激励结构和TMD振动,因此,在结构不远处安放了一台风扇,生成风荷载,模拟环境激励。通过两个激光位移计测试了结构和TMD的位移响应。采样频率为100 Hz,采样时长大于600 s。其中工况1a实测耦合振动系统的位移响应,如图 9所示。
采用本文提出的方法,识别了不同工况下质量比、结构和TMD的频率和阻尼比,识别结果如表 5所示。试验结果表明:该方法在不同的质量比和TMD阻尼比条件下都能获得理想的质量比、结构和TMD的频率和阻尼比。
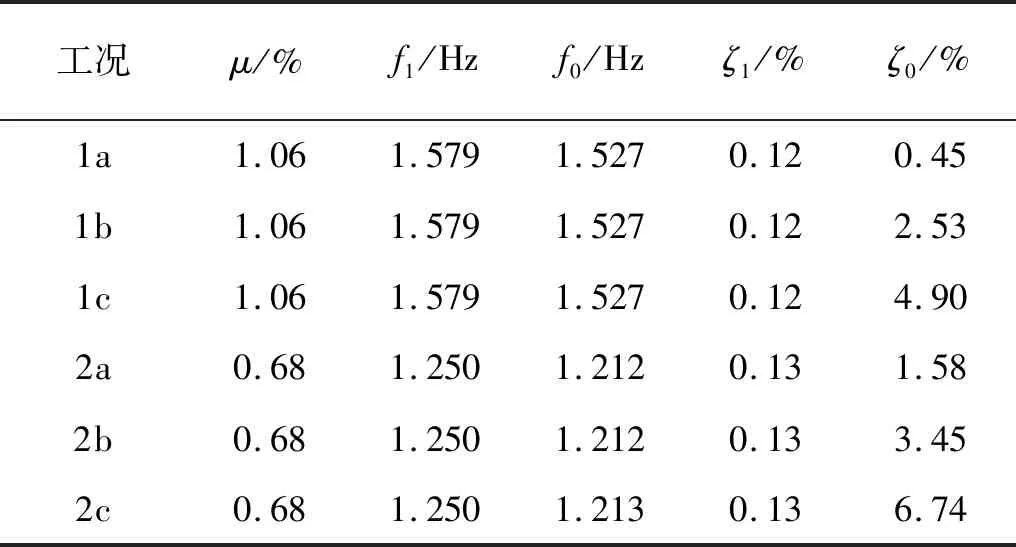
表4 不同工况下结构和TMD固有参数Tab.4 Dynamic parameters of structure and TMD for six cases

图9 工况1a实测结构-TMD耦合系统环境振动位移响应Fig.9 Ambient vibration displacements responses of structure-TMD coupling system for case 1a

表5 不同工况下识别的结构和TMD参数Tab.5 Estimated parameters for different cases
4 结 论
本文提出了一种通过测试结构-TMD耦合系统环境振动响应,识别质量比、结构和TMD固有频率和阻尼比的方法。通过数值仿真分析和试验研究分析了该方法的可行性和有效性。研究结果表明:
(1)不管结构是以单模态振动还是以多模态振动,提出的方法都能够获得理想的识别结果。
(2)结构多模态振动时,减小TMD的阻尼比能够获得更加准确的识别结果。
(3)单层框架结构试验验证了该在实际中可行,且识别结果理想。
本文中仅分析了安装单个TMD的情况,对于安装多个TMD的情况,可采用逐个TMD分别识别的方法。多个TMD一次性识别的方法还有待进一步研究。
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18
昆明医科大学学报(2022年3期)2022-04-19
振动与冲击(2022年1期)2022-01-27
房地产导刊(2021年12期)2021-12-31
北京航空航天大学学报(2021年9期)2021-11-02
中国传媒大学学报(自然科学版)(2021年1期)2021-06-09
地震研究(2021年1期)2021-04-13
电子制作(2019年16期)2019-09-27
振动与冲击(2019年4期)2019-02-22
航空学报(2015年4期)2015-05-07
