拉曼激光边带效应对冷原子重力仪测量精度的影响*
2019-10-22 02:01吴彬程冰付志杰朱栋邬黎明王凯楠王河林王兆英王肖隆林强
物理学报 2019年19期
吴彬 程冰† 付志杰 朱栋 邬黎明 王凯楠 王河林 王兆英 王肖隆 林强‡
1) (浙江工业大学理学院, 光学研究所, 杭州 310023)
2) (浙江大学物理学系, 光学研究所, 杭州 310027)
电光调制技术是产生拉曼光的几种方法之一, 其优点是系统简单、易搭建且环境适应性强.然而, 这种调制技术会产生额外的边带光, 并影响冷原子干涉绝对重力仪的测量精度.本文利用自行研制的可移动冷原子重力仪, 研究了边带效应对冷原子重力仪测量精度的影响.详细分析了拉曼反射镜的位置、拉曼脉冲的作用时刻及其间隔、拉曼光的失谐等一系列参数与边带效应之间的关系, 实验发现这些参数对冷原子重力仪的精度评估有比较大的影响; 此外, 我们还发现在有边带效应的情况下, 原本不影响重力测量精度的实验参数也会影响最终的重力测量结果.最后, 通过研究拉曼边带效应与拉曼光失谐之间的关系, 本文提出一种评估拉曼边带效应影响重力仪精度的方法.本文结果为减小拉曼边带效应对冷原子重力仪测量精度的影响提供了依据.
1 引 言
冷原子干涉仪在近些年得到飞速发展.在基础研究方面, 它可以用于精密测量基本物理常数[1−3]、检验基本物理定律[4−6].在应用研究方面, 基于冷原子干涉仪的量子传感器可以精确测量重力加速度[7,8]、重力梯度[9,10]、旋转角速度[11,12]、线加速度[13,14]等重要参数, 这些仪器是新一代惯性传感及导航的重要设备.为了将这些实验室的高精度传感器转化为适合于外场应用的设备, 仪器的小型化、轻量化、低功耗、高可靠性、高稳定性是必然的要求和发展趋势.
近年来, 冷原子干涉技术的成熟度得到快速提升, 一些量子设备已经在电梯上[15]、卡车上[16]、飞机上[17,18]、轮船上[19]、火箭上[20]、空间站上[21]得到初步的实验验证, 甚至商用化的量子重力仪产品也开始出现[22].然而, 冷原子干涉技术离真正实用还有一定距离, 尤其是激光光源有待进一步发展.以最为成熟的冷原子重力仪为例, 目前大多基于三拉曼脉冲干涉仪原理, 利用双光子受激拉曼脉冲操纵原子物质波以实现分束、偏转、合束以至原子干涉.
目前, 产生拉曼激光的方法主要有三种:光学锁相法、声光调制法和电光调制法.光学锁相法是利用光学锁相环技术实现两台窄线宽激光器的相位锁定[7], 它是最早出现且目前应用较广的一项技术; 其优点是效率高、不引起其他额外的系统效应.然而这项技术需要窄线宽的外腔式半导体激光光源, 不利于外场环境下的应用研究.声光调制法是利用声光调制器的正负一级边带产生拉曼光[23],具有搭建方便、易实现的优点, 缺点是效率低、自由光路传输, 大多也不能应用于野外和动基座测量.电光调制法主要是利用光纤电光调制器的边带调制产生拉曼光[24], 其优点是激光系统可以利用光通讯领域的成熟器件搭建[25], 激光方案及光路得以简化, 技术成熟度高、全光纤、效率高、可应用于外场.目前大多数移动平台上的外场测量[17−19,26]都是利用该方法.然而, 电光调制法会产生多余的拉曼激光边带, 这些边带也能使原子发生拉曼跃迁, 并由此产生拉曼边带效应, 从而对冷原子重力仪的绝对精度产生较大影响[27].近年来, 利用光纤I/Q调制器产生单边带拉曼光的方案开始出现[28],然而该实验系统稍显复杂, 且边带抑制的效果有待进一步改善.
本文基于一套自行研制的可移动冷原子重力仪, 研究了拉曼边带效应对重力测量精度的影响,评估了该效应引起的重力测量偏差.本文详细研究了在有拉曼边带效应的情况下, 拉曼反射镜的位置、拉曼脉冲的作用时刻及其间隔、拉曼光的失谐等参数对重力测量的影响.分析了冷原子重力仪实验的重要设置参数对边带效应引起的重力测量值变化的影响, 发现原本不敏感的参数也会影响冷原子重力仪实验.本文还提出了一种评估拉曼边带效应的方法, 即通过改变拉曼反射镜位置得到重力测量值随拉曼光失谐量的变化, 利用线性拟合找到交叉点, 从而评估出拉曼边带效应引起的重力测量偏差.
2 实验装置
本文实验所用的装置是一套冷原子重力仪系统, 真空系统和激光系统的描述可参考我们先前发表的文章[29,30].激光光源为两个1560 nm的分布式反馈半导体激光器(DFB激光器), 其中参考激光经光纤分束器分束后进入倍频波导(PPLN WG)以产生780 nm的激光, 然后利用调频转移光谱稳频的方法锁定该激光的频率.另外一个主激光器通过拍频锁定的方法锁定在参考激光器上, 利用数字跳频锁定技术可以方便更改主激光器的频率; 一部分主激光随后进入光纤电光调制器(EOM), 调制的激光利用掺铒光纤放大器(EDFA)放大到10 W,再经过倍频晶体(PPLN)转换为自由光路的780 nm激光.这种激光方案的优点是系统结构简单、抗干扰能力强, 通过改变两束激光器拍频的锁定点可以使主激光变为冷却光, 利用EOM的射频调制可以产生再泵浦光, 从而实现冷原子的装载.同样, 拉曼光也是通过调制产生, 利用单模保偏光纤输送至真空系统, 拉曼光偏振为垂直线偏振, 经过1/4波片后被拉曼反射镜完全反射, 返回光的偏振为水平线偏振, 实验装置的示意图如图1(a)所示.
对于铷87 D2线, 基态能级差G约为6.834 GHz.为了产生拉曼光, 一般调制频率设为G, 如图1(b)所示, 其他调制边带也会存在.调制边带频差如果是G都可以产生拉曼跃迁, 以图1(c)为例进行说明, 载波(k2)和正一级调制边带(k1)是想要的拉曼光组合, 然而负一级调制边带(k3)与载波(k2)也是一组拉曼光组合, 也能与原子发生双光子过程, 这就是所谓的拉曼边带效应.多余的边带对冷原子干涉绝对重力测量会产生重要影响, 详细的理论分析见参考文献[27], 边带引起的重力变化跟拉曼光反射镜到冷原子团中心的位置zM、拉曼光失谐∆、第一束拉曼脉冲作用时刻t0等参数密切相关.
本文中涉及到的实验大多基于冷原子干涉重力仪开展.首先通过二维磁光阱(2D-MOT)制备一束低速的冷原子团, 并在二维输送光的推动下将其输送到三维磁光阱(3D-MOT)进行原子装载.经过 400 ms的装载, 三维磁光阱大约可装载109个原子, 然后利用偏振梯度冷却过程将这团冷原子温度降至 5 µK.进一步关断所有光场, 原子将在重力场作用下自由下落, 此时大部分原子都将处于F= 2 的 5 个磁子能级上.开启竖直向 50 mG的磁场以定义量子化轴, 通过作用微波和拉曼选态π脉冲, 将原子制备到对磁场不敏感的|F=1,mF=0⟩纯态上.随后, 在t0时刻, 作用三束多普勒敏感的 π /2− π − π/2 拉曼脉冲序列使原子波包干涉, 并利用归一化探测方法实现原子布居数的探测.整个测量周期耗时 0.7 s, 测量重复率为 1.4 Hz,包括冷原子装载、偏振梯度冷却、量子态纯化、冷原子干涉以及归一化探测等过程.

图1 拉曼光边带效应示意图Fig.1.The schematic diagram of Raman sideband effect.
3 拉曼边带效应实验结果
拉曼边带效应对冷原子干涉绝对重力测量的影响是复杂且显著的.利用传统的外腔式半导体激光器及光学锁相环技术可以产生无边带的拉曼光系统, 与利用EOM调制的有边带拉曼光系统可以进行比较, 基于同一套真空单元排除其他系统效应影响, 有无边带效应的实验结果如图2所示.从图中可以看出, 在有边带效应的情况下, 重力测量值随不同T(拉曼脉冲的时间间隔)而变化, 幅度可达 1400 µGal.相反, 在无边带效应的情况下, 重力测量值幅度变化约10 µGal左右.改变T测重力变化的方法是评估绝对重力的一种重要手段[31],因此边带效应会直接影响冷原子重力仪的测量精度.
虽然拉曼边带效应有相关的理论可以计算和解释[27], 但是实际实验中很难用理论精确算出边带效应引起的重力测量值变化.拉曼边带效应是一个综合效应, 与许多实验参数密切相关, 比如拉曼光中各调制边带的功率比r、拉曼脉冲的时间间隔T、拉曼光反射镜到冷原子团中心的位置zM、作用第一个 π /2 脉冲的时刻t0、拉曼光失谐∆等参数.因为动态情况下的各调制边带的功率比、原子团位置等存在涨落, 很难在实验上精确测量这些参数,所以理论计算只能提供粗略参考.
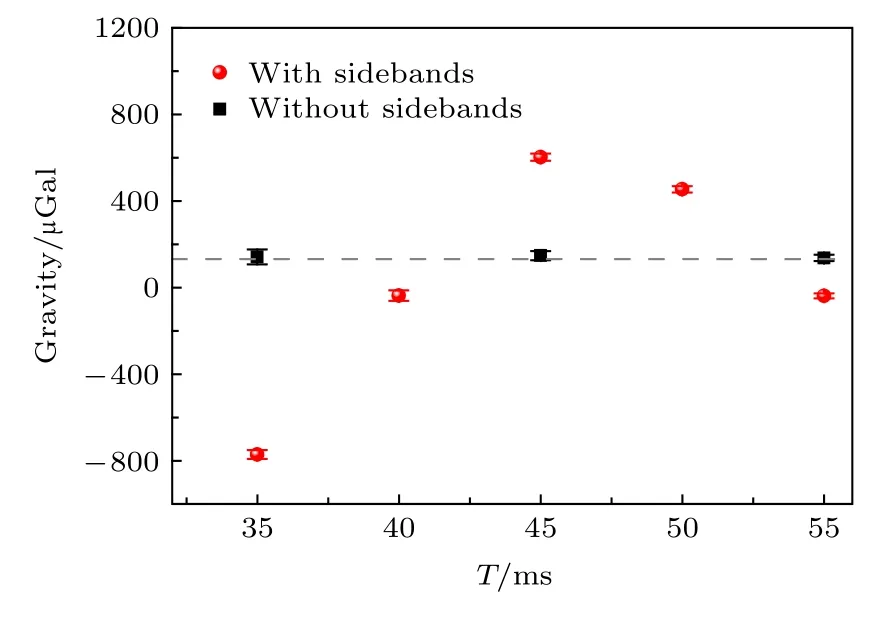
图2 有无拉曼边带效应对冷原子重力仪测量结果的影响Fig.2.The influence of laser systems with and without sidebands on the measured results of cold atom gravimeter.
下面结合实验介绍这些参数对冷原子干涉重力测量的影响.
1)拉曼光反射镜到冷原子团中心的位置
在其他参数基本不变的情况下, 改变拉曼光反射镜到冷原子团中心的位置zM, 分别在zM=41.50 cm 和zM= 40.58 cm 两个位置得到了重力测量值随T的变化, 结果如图3所示.实验发现,不同拉曼反射镜位置, 重力测量值随T的变化关系完全不同, 且重力测量值变化幅度都较大(zM=40.58 cm 时, 重力测量值变化幅度达到 2400 µGal).为了验证测量的重复性, 在相同的拉曼光反射镜位置 (zM= 41.50 cm), 在不同时间进行了多次测量,结果如图4所示.实验发现不同天的测量数据基本符合, 趋势相同, 但是局部仍存在不重合, 本实验说明冷原子干涉重力测量对拉曼反射镜位置比较敏感.
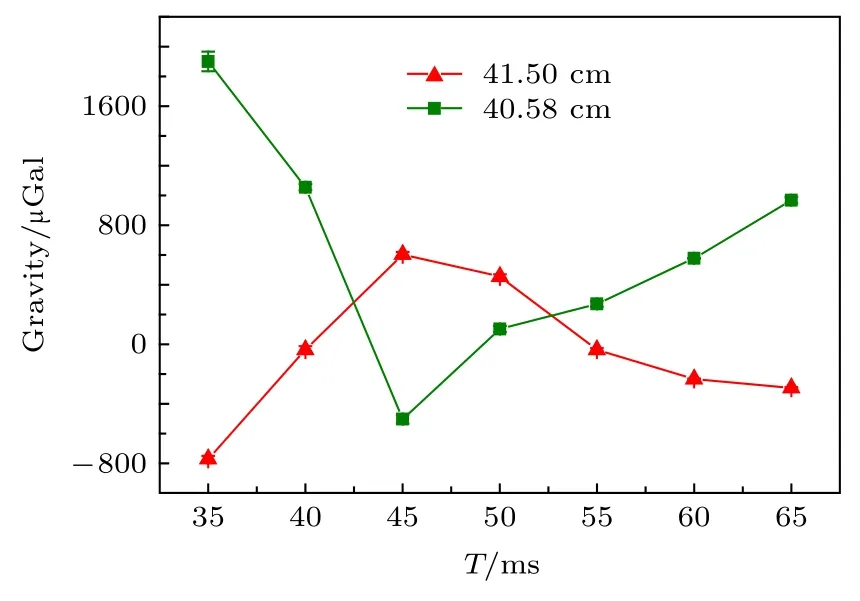
图3 不同拉曼光反射镜位置重力测量值随 T 的变化.实心三角形:zM= 41.50 cm 的实验数据; 实心正方形:zM=40.58 cm的实验数据Fig.3.Measurements of the gravity changes as a function of at two different positions of Raman retro-reflection mirror.Red and green scatters are the experimental data of the position of 41.50 cm and 40.58 cm respectively.

图4 相同拉曼光反射镜位置下多次测量重力值随 T 的变化关系.不同颜色代表不同天的测量数据Fig.4.Measurements of the functions of gravity changes as different T when the positions of Raman retro-reflection mirror are the same.Different colors denote the experimental data measured at different days.
2)作用第一个 π /2 脉冲的时刻t0
通过独立改变第一个拉曼 π /2 脉冲的作用时刻t0这一参数, 可以得到图5的实验数据.随着t0的增加, 重力测量值的变化幅度可达 1200 µGal, 在t0=8 ms左右有一个最大值.
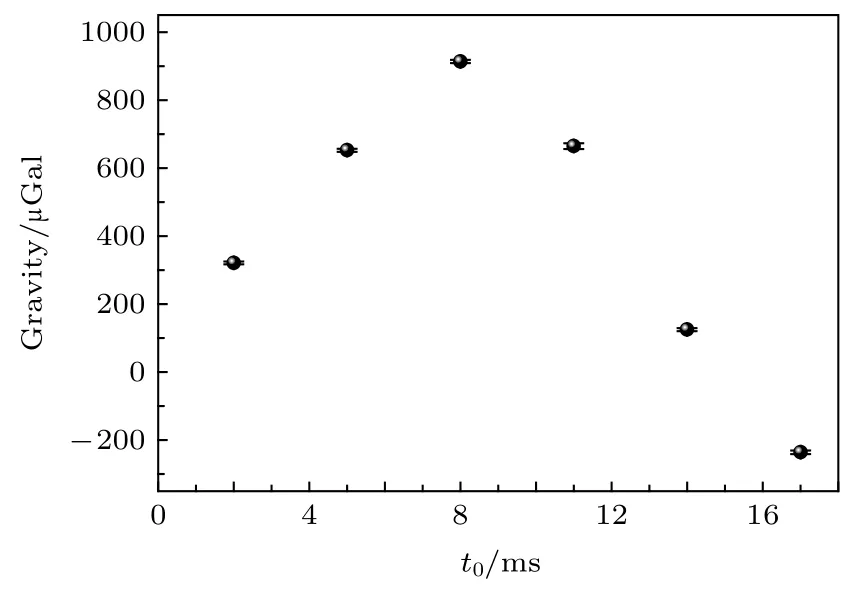
图5 重力测量值随 t0 的变化关系Fig.5.The measured gravity changes as a function of t0.
3)拉曼光失谐∆
实验上通过改变拉曼光失谐∆可以得到重力测量值的变化, 测量数据如图6所示, 实验发现重力测量值随∆基本上线性变化, 斜率约为–0.87(7)µGal/MHz.
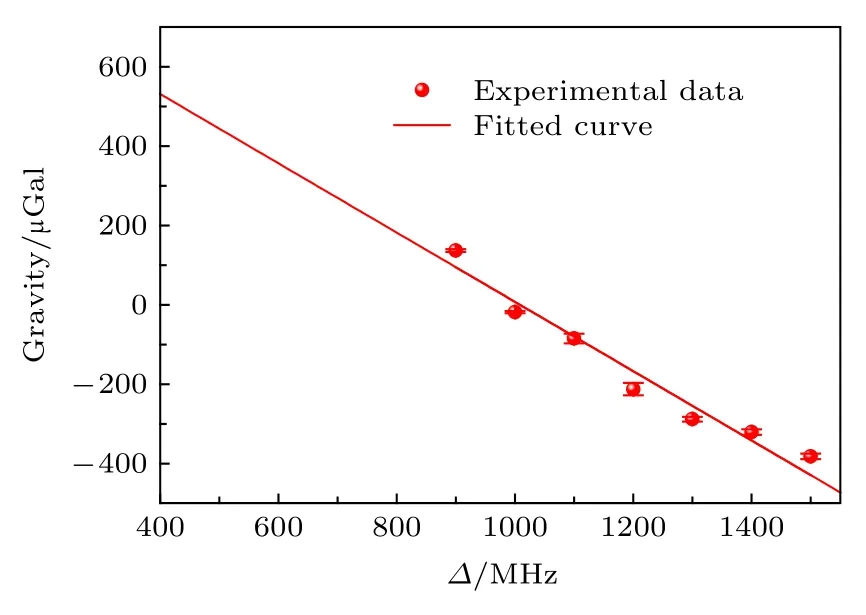
图6 重力测量值随拉曼光失谐 ∆ 的变化.红圆点:实验数据; 红线:线性拟合曲线Fig.6.The gravity variations with the changes of the detuning of Raman laser.Red dots:the experimental data;Red line:the linear fitted curve.
4)其他实验参数的影响
除了以上几个实验参数之外, 实验还发现边带效应会使原本对重力测量不敏感的实验参数变得敏感.在扫描原子干涉条纹之前, 通常需要测量拉曼谱以确定正负频率扫描的共振频率位置, 为后续进行量子态纯化和干涉仪配置做准备.在无边带效应的情况下, 按照先前的理论, 设置不同的共振频率, 只是选择不同速度群的原子, 对最终的重力测量影响不大.然而, 在有边带效应的情况下, 选择不同速度群的原子, 相当于间接改变了拉曼光反射镜与原子团中心的位置, 从而导致重力测量值与该共振频率的设置点有关.
为了验证该效应, 首先扫描拉曼谱, 确定正负扫描时的两个共振峰位置f−和f+, 前者是负扫描的中心共振峰, 后者是正扫描的中心共振峰, 它们是二配置重力测量方案必须要设定的参数[32].通过固定f+, 改变f−可以研究该效应对重力测量的影响, 实验数据如图7(a)所示.在共振峰中心位置附近变化正负20 KHz, 重力测量值的变化幅度约为120 µGal, 线性拟合的斜率约为–2.9(0.2) µGal/kHz.同样, 利用无边带效应拉曼激光系统也可以进行类似实验, 结果如图7(b)所示, 改变f−重力仪的系统误差变化不大.
冷原子重力仪实验中, 设置完f−和f+后, 需要在这些频率点扫描拉比震荡曲线以确定拉曼 π 脉冲的脉冲宽度.然而, 由于拉曼 π 脉冲通常比较短,在 10 µs左右, π 脉冲的宽度不容易设置, 经常需要粗略设置.另外, 考虑到拉曼光功率的漂移会引起 π 脉冲的宽度变化, 因此有必要研究不同拉曼光脉冲配置对重力测量的影响.实验上, 通过扫描拉比震荡确定 π 脉冲的宽度是 12 µs, 一般设置三拉曼脉冲时间序列为 6 µs–12 µs–6 µs (π /2− π − π/2).在有边带效应的情况下, 分别在正常脉冲配置两边设置5 µs–11 µs–5 µs, 6 µs–11 µs–6 µs, 6 µs–13 µs–6 µs,7 µs–12 µs–7 µs四组实验.实验结果如图8(a)所示, 不同拉曼脉冲配置会影响重力测量值, 重力测量值最大变化幅度可达40 µGal, 无明显变化规律.然而, 基于无边带效应激光系统, 在不同拉曼脉冲配置下重力测量值变化不大, 实验结果如图8(b)所示.
4 一种拉曼边带效应的评估方法
由第三节实验可知, 拉曼边带效应对很多实验参数很敏感, 因而会对冷原子干涉绝对重力测量产生影响.为了消除和减小其影响, 一种方案是通过外加调制器或FP腔滤波器直接消除多余的边带,在源头上抑制边带效应带来的影响[28], 这种方法的最终效果取决于各边带的抑制比.另外一种方案是选择合适的实验参数减小其影响, 比如设置合适的T和v0(第一个拉曼脉冲时的原子竖直速度)使原子干涉仪工作在对边带效应不敏感的点上[27].其实不管哪种方案, 对冷原子重力仪来讲, 都需要评估出拉曼边带效应对绝对重力测量产生的影响,即该系统效应的大小需要评估.
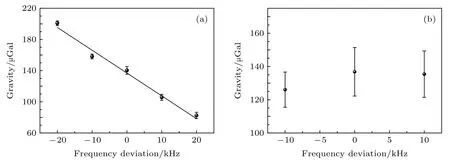
图7 重力测量值随拉曼共振峰位置的变化 (a) 有边带效应; (b) 无边带效应; 圆散点:实验数据; 黑线:线性拟合曲线Fig.7.The gravity variations as a function of the positions of Raman resonant peak.(a) With sidebands effect; (b) without sidebands effect.Round scatters:the experimental data; Black line:the linear fitted curve.
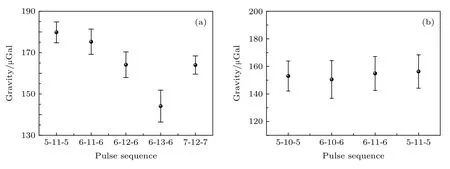
图8 不同拉曼脉冲配置对重力测量的影响 (a)有边带效应情况; (b)无边带效应情况Fig.8.The influence of different configurations of Raman pulses sequence on the measurement of gravity.(a) The case with sidebands effect; (b) the case without sidebands effect.
由图6的实验结果知, 边带效应引起的重力测量值随拉曼光失谐∆线性变化.基于这一规律, 实验可以通过改变拉曼光反射镜与原子团中心之间的位置, 分别在两个竖直高度得到重力测量值随∆的线性变化曲线, 则在两条拟合的直线交叉点A处, 可以认为该点对反射镜位置不敏感.实验结果如图9所示, 两个反射镜位置 (41.50 cm和40.58 cm)下分别可以得到重力测量值随拉曼光失谐的线性变化曲线, 交叉点A点的重力测量值约为 454(30) µGal.

图9 不同拉曼光反射镜位置重力测量值随拉曼光失谐的变化.红点和黑点分别是41.50 和40.58 cm两个竖直位置下的实验数据, 红色和黑色直线分别是其线性拟合曲线Fig.9.Measurements of the gravity as a function of the detunings of Raman laser at the different positions of Raman retro-reflection mirror.red and black scatters are the experimental data for two different heights 41.50 cm and 40.58 cm respectively; Red and black lines are the corresponding fitted curves.
进一步, 考虑到改变第一个拉曼脉冲作用时刻t0有类似的效果, 我们测量了不同t0下重力测量值随拉曼光大失谐D的变化.如图10所示,t0=8, 11, 17 ms 情况下, 对实验数据进行了线性拟合,得到的三条直线相交于一点, 则该点对第一个拉曼脉冲作用时刻不敏感.
综上, 拉曼边带效应是一个非常综合的效应,与多个实验参数有关系, 对冷原子重力仪的精度影响显著.改变拉曼脉冲的时间间隔T、拉曼光反射镜到冷原子团中心的位置zM、作用第一个 π /2 脉冲的时刻t0、拉曼光失谐∆等实验参数, 测量到的重力仪系统误差变化都可达到1000 µGal.与无边带效应的冷原子重力仪相比, 原本对重力测量不敏感的实验参数也会影响重力测量值, 比如拉曼共振峰位置变化引起的重力仪系统误差变化达到140 µGal,不同拉曼脉冲配置导致的重力测量值改变约40 µGal.此外, 拉曼光中各调制边带的功率比r需要评估, 定量的实验研究需要进一步开展.上述实验参数的稳定性对实验的影响可以进一步探究, 目前来看拉曼光反射镜到冷原子团中心的位置涨落比较难评估, 是影响边带效应的一个重要因素.

图10 不同t0下重力测量值随拉曼光大失谐D的变化.黑圆点:t0= 8 ms; 红三角:t0= 11 ms; 蓝方块:t0= 17 msFig.10.The measured gravity as a function of the detunings of Raman laser with different t0.The black dots:t0=8 ms; The red triangle:t0= 11 ms; the blue square:t0=17 ms.
未来, 拉曼激光边带的消除及抑制技术有待发展.一方面, 可以从源头出发主动解决边带效应的影响问题.目前定制合适的FP腔滤波器和外加I/Q调制器都是不错的选择, 不过这些技术有待进一步改善.另一方面, 选择合适的实验参数被动地抑制其影响也是一种选择, 这要求对实验参数有较好的控制, 且需要深入研究实验参数与边带效应之间的关系.总之, 随着技术以及方法的发展, 我们相信拉曼边带效应的影响最终可以得到精确评估.
5 结 语
基于一套冷原子重力仪, 本文分析了拉曼边带效应对仪器性能的影响.主要从冷原子重力仪的各个实验参数出发, 在有边带效应的情况下, 研究了拉曼反射镜的位置、拉曼脉冲的作用时刻及其间隔、拉曼光的失谐等一系列参数对重力测量的影响规律, 并测量了不同拉曼谱共振峰位置、不同拉曼脉冲序列组合引起的重力测量值变化.实验发现,拉曼边带效应引起的重力测量值变化对实验参数比较敏感.最后, 基于边带效应引起的重力测量值随拉曼光的失谐线性变化这一规律, 通过在不同拉曼反射镜位置进行实验, 可以找到一个对拉曼反射镜位置不敏感的交叉点, 从而评估出拉曼边带效应引起的系统效应, 约为 454(30) µGal.本文结果为减小拉曼边带效应对冷原子重力仪测量精度的影响提供了依据, 为小型化原子干涉传感器研制提供了思路.
猜你喜欢
新能源科技(2022年9期)2022-11-20
小哥白尼(神奇星球)(2022年5期)2022-08-15
辽宁省博物馆馆刊(2021年0期)2021-07-23
科普童话·神秘大侦探(2020年3期)2020-05-11
空间控制技术与应用(2019年6期)2020-01-09
航天返回与遥感(2019年2期)2019-05-17
航天返回与遥感(2018年6期)2019-01-07
新疆人文地理(2016年9期)2016-05-14
小天使·一年级语数英综合(2016年9期)2016-05-14
太空探索(2015年11期)2015-07-18